标签:span temp boa ima 完成 bsp 输入 oat char
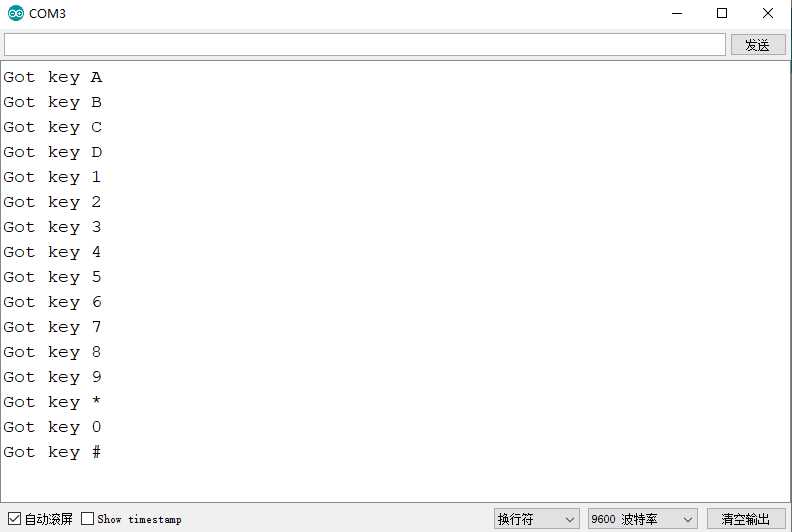
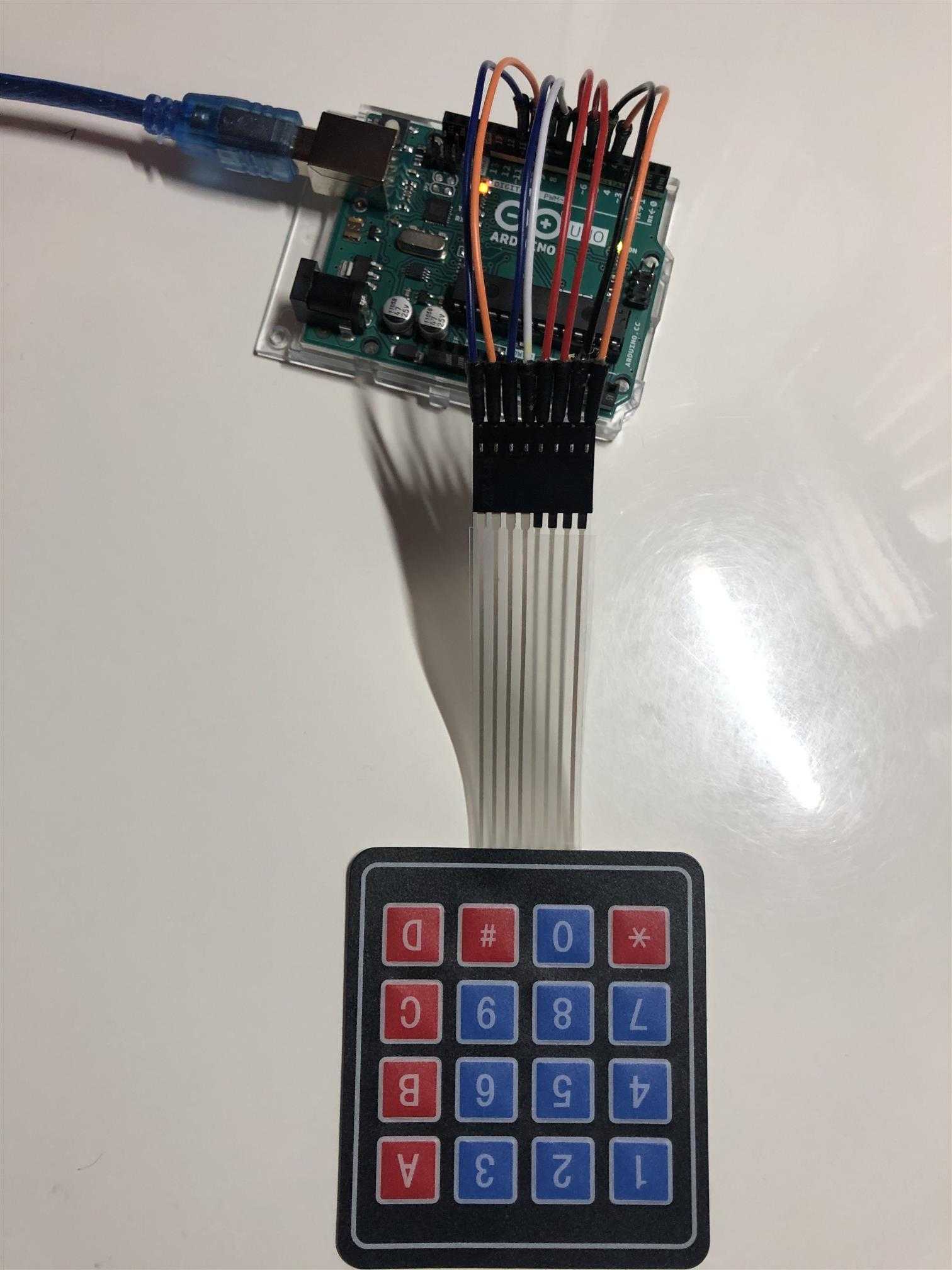
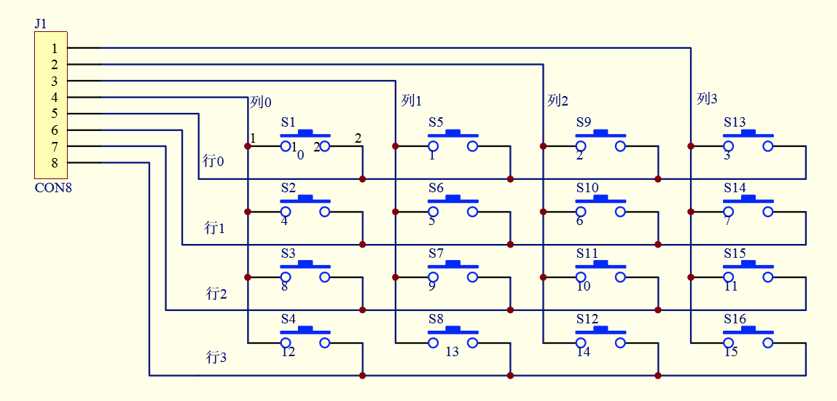
(一) 4×4薄膜按键
代码如下:
1 const int numRows = 4; 2 const int numCols = 4; 3 const int debounceTime = 20; 4 const char keymap[numRows][numCols] = { 5 {‘1‘,‘2‘,‘3‘,‘A‘}, 6 {‘4‘,‘5‘,‘6‘,‘B‘}, 7 {‘7‘,‘8‘,‘9‘,‘C‘}, 8 {‘*‘,‘0‘,‘#‘,‘D‘} 9 }; 10 const int rowPins[numRows] = {4,5,6,7}; 11 const int colPins[numCols] = {8,9,10,11}; 12 13 void setup() { // all keymap level = HIGH 14 // put your setup code here, to run once: 15 Serial.begin(9600); 16 for(int row = 0; row < numRows; row++){ 17 pinMode(rowPins[row], INPUT); //输入 18 digitalWrite(rowPins[row], HIGH); //上拉电阻, 19 } 20 for(int column = 0; column < numCols; column++){ 21 pinMode(colPins[column], OUTPUT); //写出,只有列能写(8,9,10,11)口 22 digitalWrite(colPins[column], HIGH); 23 } 24 } 25 26 void loop() { 27 // put your main code here, to run repeatedly: 28 char key = getkey(); 29 if(key != 0){ 30 Serial.print("Got key "); 31 Serial.println(key); 32 } 33 } 34 35 char getkey(){ 36 char key = 0; 37 for(int column = 0; column < numCols; column++){ //列 38 digitalWrite(colPins[column], LOW); 39 for(int row = 0; row < numRows; row++){ 40 if(digitalRead(rowPins[row]) == LOW){ // touch keyboard ? 41 delay(debounceTime); 42 while(digitalRead(rowPins[row]) == LOW){ 43 key = keymap[row][column]; 44 } 45 } 46 } 47 digitalWrite(colPins[column], HIGH); 48 } 49 return key; 50 }
(二) 9G舵机
代码
#include <Servo.h> Servo myservo; void setup() { // put your setup code here, to run once: myservo.attach(9); } void loop() { // put your main code here, to run repeatedly: for(int pos = 0; pos < 180; pos++){ myservo.write(pos); delay(15); } for(int pos = 180; pos >= 1; pos--){ myservo.write(pos); delay(15); } }

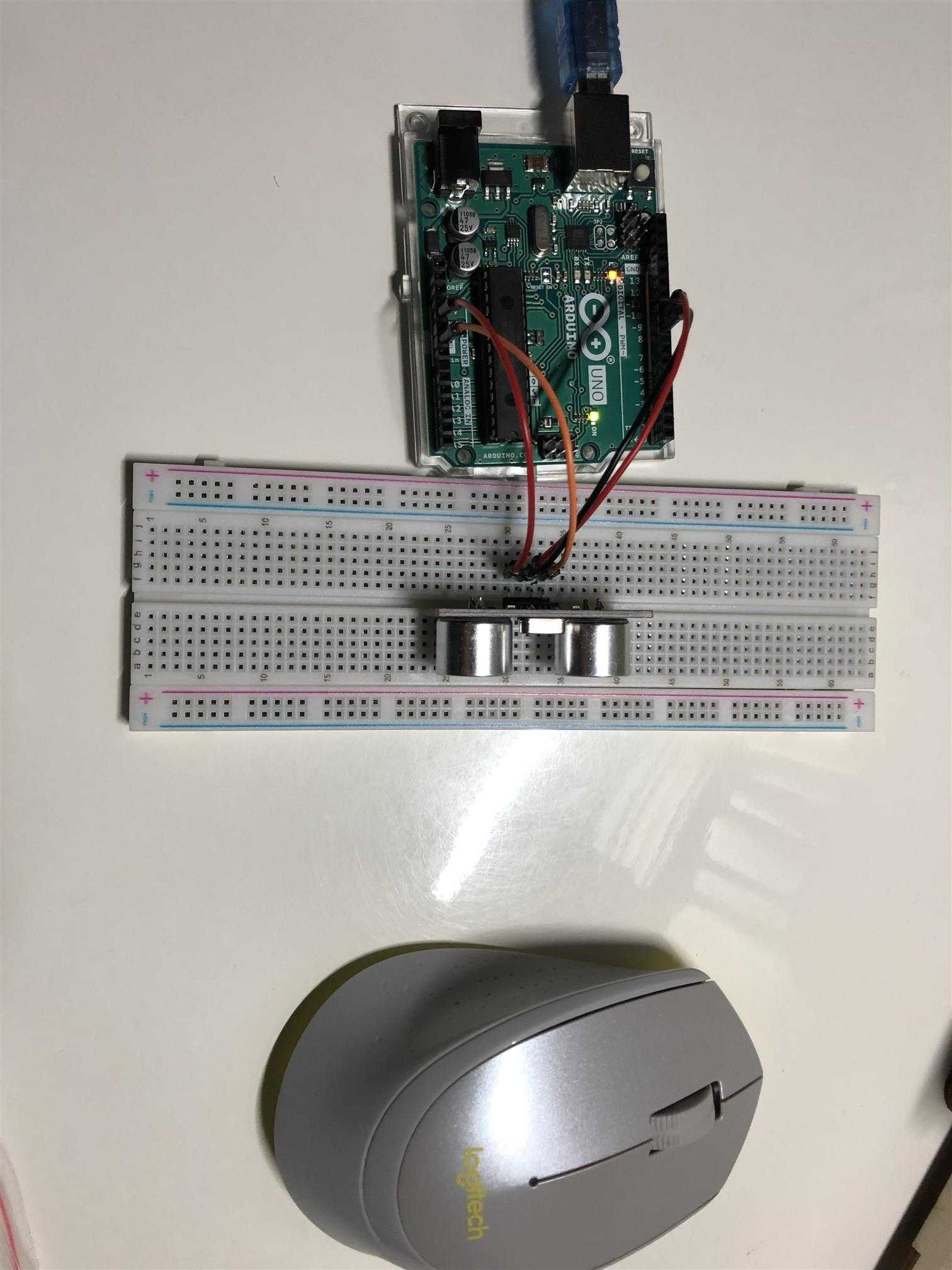
(三) 超声传感器
代码
const int trig = 8; const int echo = 9; void setup() { // put your setup code here, to run once: pinMode(trig, OUTPUT); pinMode(echo, INPUT); Serial.begin(9600); } void loop() { // put your main code here, to run repeatedly: long IntervalTime = 0; while(1){ digitalWrite(trig, HIGH); delayMicroseconds(15); digitalWrite(trig, LOW); IntervalTime = pulseIn(echo, HIGH); float S = IntervalTime/58.00; Serial.println(S); S = 0; IntervalTime = 0; delay(500); } }
(四) 人体传感器
代码
int ledpin = 12; int inpin = 13; int buttonState; void setup() { // put your setup code here, to run once: pinMode(ledpin, OUTPUT); pinMode(inpin, INPUT); Serial.begin(9600); } void loop() { // put your main code here, to run repeatedly: buttonState = digitalRead(inpin); if(buttonState == HIGH){ digitalWrite(ledpin, HIGH); delay(100); buttonState = digitalRead(inpin); if(buttonState == LOW){ digitalWrite(ledpin, LOW); Serial.println(buttonState); } } }
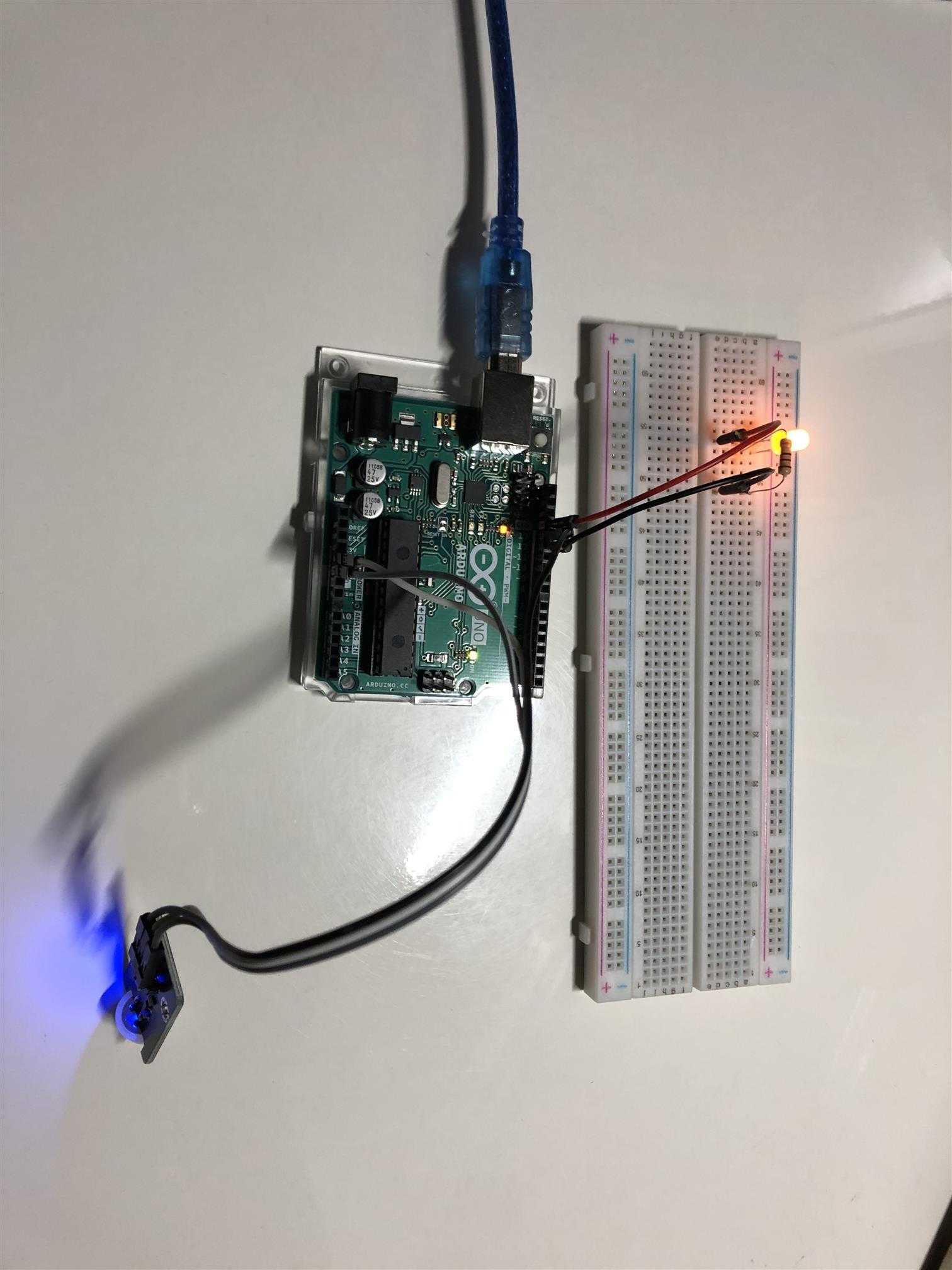
(五) 1位数码管
代码
int LEDCount = 8; const unsigned char dofly_DuanMa[16] = {0x3f,0x06,0x5b,0x4f,0x66, 0x6d,0x7d,0x07,0x7f,0x6f, 0x77,0x7c,0x39,0x5e,0x79,0x71}; int LEDPins[] = {0,1,2,3,4,5,6,7}; void setup() { // put your setup code here, to run once: for(int i = 0; i < LEDCount; i++){ pinMode(LEDPins[i], OUTPUT); } } void deal(unsigned char value){ for(int i = 0; i < 8; i++){ digitalWrite(LEDPins[i], bitRead(value, i)); } } void loop() { // put your main code here, to run repeatedly: for(int i = 0; i < 16; i++){ deal(dofly_DuanMa[i]); delay(1000); } }
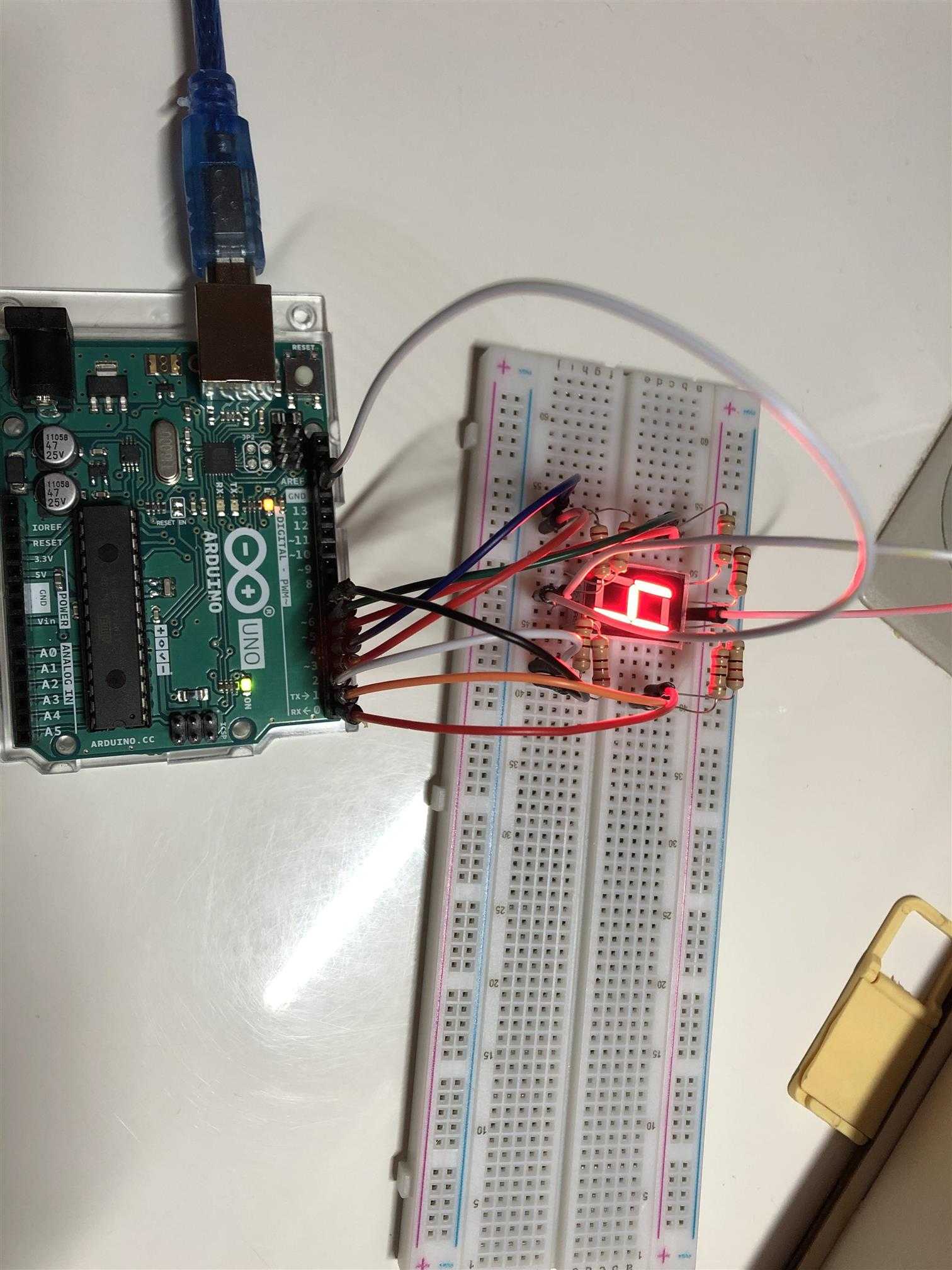
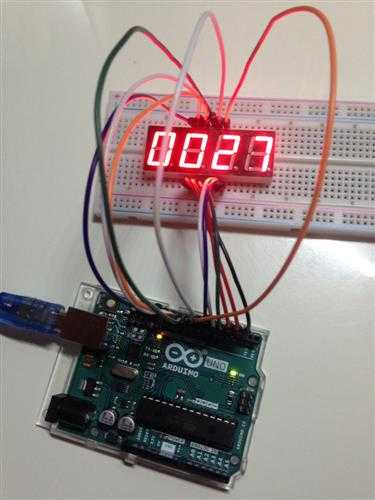
(六) 四位数码管
1 int LEDCount = 8; 2 int SEGCount = 4; 3 long previousMillis = 0; 4 const unsigned char dofly_DuanMa[16] = {0x3f,0x06,0x5b,0x4f,0x66, 5 0x6d,0x7d,0x07,0x7f,0x6f, 6 0x77,0x7c,0x39,0x5e,0x79,0x71}; 7 int LEDPins[] = {12,8,5,3,2,11,6,4}; 8 int SegPins[] = {13,10,9,7}; 9 unsigned char displayTemp[4]; 10 11 void setup() { 12 // put your setup code here, to run once: 13 for(int i = 0; i < LEDCount; i++){ 14 pinMode(LEDPins[i], OUTPUT); 15 } 16 for(int j = 0; j < SEGCount; j++){ 17 pinMode(SegPins[j], OUTPUT); 18 //digitalWrite(SegPins[j], HIGH); 19 } 20 } 21 22 void deal(unsigned char value){ 23 for(int i = 0; i < 8; i++){ 24 digitalWrite(LEDPins[i], bitRead(value, i)); 25 //bitRead(value, i); 26 } 27 } 28 29 // Static code 30 //void loop() { 31 // // put your main code here, to run repeatedly: 32 // 33 // static unsigned int num; 34 // static unsigned long lastTime = 0; 35 // 36 // if(millis() - lastTime >= 1000){ 37 // lastTime = millis(); 38 // num++; 39 // } 40 // 41 // // static display 1 2 3 4 42 // displayTemp[0] = dofly_DuanMa[1]; 43 // displayTemp[1] = dofly_DuanMa[2]; 44 // displayTemp[2] = dofly_DuanMa[3]; 45 // displayTemp[3] = dofly_DuanMa[4]; 46 // 47 // static int i = 0; 48 // unsigned long currentMillis = millis(); 49 // 50 // if(currentMillis - previousMillis > 0){ 51 // previousMillis = currentMillis; 52 // deal(0); 53 // 54 // for(int a = 0; a < 4; a++){ 55 // digitalWrite(SegPins[a], HIGH); 56 // } 57 // 58 // digitalWrite(SegPins[i], LOW); 59 // deal(displayTemp[i]); 60 // delay(500); 61 // i++; 62 // if(i == 4) { i = 0; } 63 // } 64 //} 65 66 // Dynamic code 67 void loop() { 68 // put your main code here, to run repeatedly: 69 70 static unsigned int num; 71 static unsigned long lastTime = 0; 72 73 if(millis() - lastTime >= 1000){ 74 lastTime = millis(); 75 num++; 76 } 77 78 // static display 1 2 3 4 79 displayTemp[0] = dofly_DuanMa[num/1000]; 80 displayTemp[1] = dofly_DuanMa[(num%1000)/100]; 81 displayTemp[2] = dofly_DuanMa[((num%1000)%100)/10]; 82 displayTemp[3] = dofly_DuanMa[((num%1000)%100)%10]; 83 84 static int i = 0; 85 unsigned long currentMillis = millis(); 86 87 if(currentMillis - previousMillis > 0){ 88 previousMillis = currentMillis; 89 deal(0); 90 91 for(int a = 0; a < 4; a++){ 92 digitalWrite(SegPins[a], HIGH); 93 } 94 95 digitalWrite(SegPins[i], LOW); 96 deal(displayTemp[i]); 97 i++; 98 if(i == 4) { i = 0; } 99 } 100 }
总结:
(1)舵机不能转到逆时针的180°,不知道是不是机器的原因;
(2)四位数码管,位引脚低电位有效。
(3)总的来说,代码仔细点,保证硬件有效连接,都还是可以完成的!
Arduino UNO 学习 (三) 4×4薄膜按键、9G舵机、超声波传感器、人体传感器、1位数码管、四位数码管
标签:span temp boa ima 完成 bsp 输入 oat char
原文地址:https://www.cnblogs.com/heze/p/12790344.html