标签:起点 解决 区间 应该 rmq off time 大整数 分解
LCA)T的两个结点u,v,最近公共祖先LCA(T,u,v)表示一个结点x,满足x是u,v的深度最大的祖先节点。LCA算法分为离线算法和在线算法
off line algorithms),是指基于在执行算法前输入数据已知的基本假设,也就是说,对于一个离线算法,在开始时就需要知道问题的所有输入数据,而且在解决一个问题后就要立即输出结果。LCA的离线算法主要指的是基于深度优先搜索的tarjan算法tarjan求LCA实现步骤:
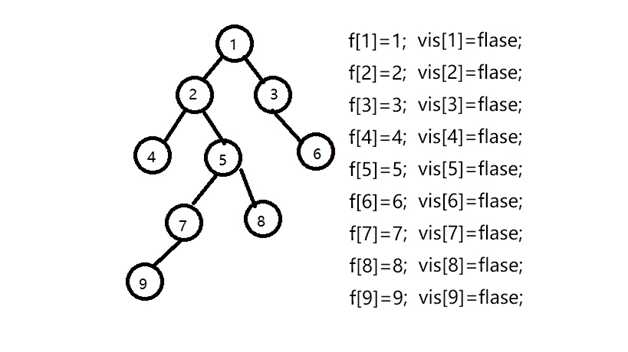
u为根节点,从根节点开始DFS。u所有子节点v,并标记这些子节点v已被访问过。v还有子节点,返回2,否则下一步。v合并到u上。u有关的询问关系的点v。v已经被访问过了,则可以确认u和v的最近公共祖先为v所在集合的根节点。设f[]数组为并查集的父亲节点数组,初始化f[i]=i,vis[]数组为是否访问过的数组,初始为0;
询问为:LCA(9,8),LCA(4,6),LCA(7,5),LCA(5,3)
图示:
初始状态:
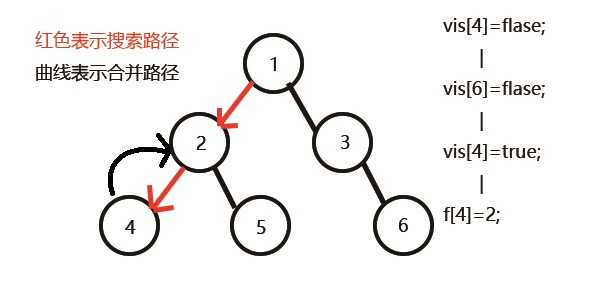
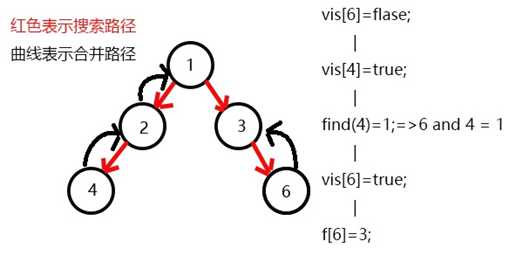
以1为根节点DFS,直到节点4访问结束,和4相关的查询有节点6,但6还未访问,说明LCA(4,6)还不确定,把节点4合并到其父节点为根的子树上,即:f[4]=2。
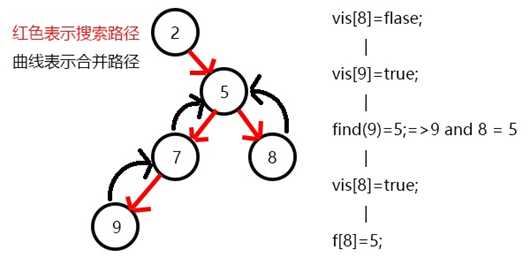
继续DFS直到搜到节点9结束,和9相关的查询有节点8,但8还未访问,合并9,即:f[9]=7。
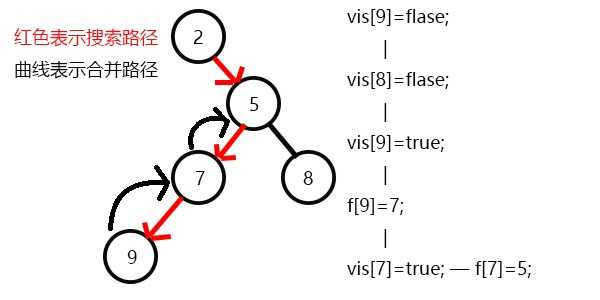
9结束后回溯到节点7,节点7结束,和7相关的查询有5,此时5虽然没有变黑,但可以肯定5是7的祖先,实际上可以求出LCA(5,7)=5,也可以等5变黑再求均可。
继续搜8,发现8没有子节点,则寻找与其有关系查询为9,此时9已黑,则他们的最近公共祖先为find(9)=5;在find(9)过程中会把9路径压缩,直接挂到5上,此时因为节点5未变黑,所以f[5]=5,注意父子关系必须变黑后建立
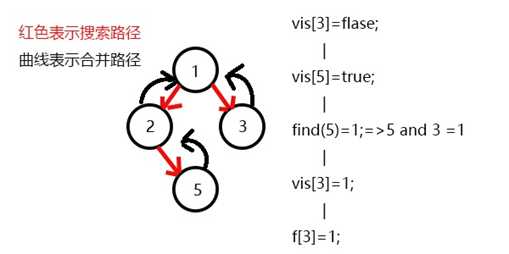
返回5后,变黑,此时跟5相关的查询点有3和7,3未访问,7已变黑,此时也可以求出LCA(5,7)=find(7)=5。
回溯到2没有相关查询,一次遍历到节点6,与节点6相关的查询时节点4,且4已黑,在求出LCA(4,6)=1。
回溯到3,3变黑,和3相关的查询点有5,5已黑,5的祖先节点1即为公共祖先即LCA(3,5)=find(5)=1。
例题:点的距离
Description
- 给定一个
n个点的树,Q个询问,每次询问x到y点的距离。Input
- 第一行为一个整数
n(n<=1e4),表示n个节点。- 接下来
n-1行,每行两个整数x,y表示x到y有一条边,所有边权为1。Output
- 输出
Q行,表示询问。Sample Input
6 1 2 1 3 2 4 2 5 3 6 2 2 6 5 6Sample Output
3 4
code#include <bits/stdc++.h> const int maxn=1e4+5,maxq=1e5+5; struct Edge{int to,id,next;}e[2*(maxn+maxq)];//询问和树存储在同一个数组 int head[2*maxn],len,n;//1~n存树,n+1~2*n存询问 int dis[maxn],vis[maxn],f[maxn],ans[maxq];//ans[i]存储第i个答案 void Insert(int x,int y,int z){//id记录是第几个询问 e[++len].to=y;e[len].id=z;e[len].next=head[x];head[x]=len; } int Find(int x){ return x==f[x] ? x : f[x]=Find(f[x]); } void Tarjan(int u){ vis[u]=1;f[u]=u;//初始化并查集 for(int i=head[u];i;i=e[i].next){ int v=e[i].to; if(vis[v])continue; dis[v]=dis[u]+1;//dis[u]表示u到根节点点的距离 Tarjan(v); f[v]=u;//v变黑之后再跟上线建立联系,保证v的子孙节点 }//在v访问结束之前最远也只能查找到v for(int i=head[n+u];i;i=e[i].next){//u变黑,查找u相关的询问 int v=e[i].to-n,id=e[i].id; if(vis[v])//如果v已访问,此时v不一定变黑,有可能为灰此时LCA(u,v)=Find(v) ans[id]=dis[u]+dis[v]-2*dis[Find(v)]; } } void Solve(){ scanf("%d",&n); for(int i=1;i<n;++i){ int u,v;scanf("%d%d",&u,&v); Insert(u,v,1);Insert(v,u,1); } int Q;scanf("%d",&Q); for(int i=1;i<=Q;++i){ int u,v;scanf("%d%d",&u,&v); Insert(u+n,v+n,i);Insert(n+v,n+u,i); }//询问存储到n+1~2*n Tarjan(1); for(int i=1;i<=Q;++i) printf("%d\n",ans[i]); } int main(){ Solve(); return 0; }
Tarjan 算法需要初始化并查集,所以预处理的时间复杂度为O(n) ,Tarjan 算法处理所有询问的时间复杂度为 O(n+q)。但是 Tarjan 算法的常数比倍增算法大。
LCA实现步骤:求LCA(u,v)
DFS求出每个节点相对于根节点的深度d[i]。d[u]<d[v],交换节点u和v,如果u和v的深度不一样,找到u的和v在同一深度的祖先节点u‘,显然LCA(u,v)==LCA(u‘,v)。u‘==v,即v正好是u的祖先,则LCA(u,v)=v,结束,否则进行如下操作:
u和v同时跳 \(2^j\) 步指向同一点,说明他们的 \(2^j\) 祖先是同一个点,但不一定是最近的公共祖先,有可能跳多了,我们就调小一般的上跳幅度,即跳\(2^{j-1}\)步。u,v,我们u和v分别为他们的 \(2^j\) 祖先。然后减小上跳幅度为原来一半即j--,重复1., 2.,直到j==0,此时两个点必然都在LCA下面那层,所以再跳1步即可。上面的思想实际上是利用了倍增的思想:
定义:\(f[i][j]\) 表示节点i往上跳 \(2^j\) 步后的节点,即i的 \(2^j\) 祖先 ,显然:
i的父亲节点从根节点进行一遍DFS,可以很快预处理出每个节点的 \(2^j\) 祖先和深度。
void dfs(int u,int fa){//对应深搜预处理f数组
dep[u]=dep[fa]+1;//预处理节点深度
for(int i=1;(1<<i)<=dep[u];i++)
f[u][i]=f[f[u][i-1]][i-1];//根据u的深度,预处理其2^i祖先
for(int i=head[u];i;i=e[i].next){
int v=e[i].to;
if(v==fa)continue;
f[v][0]=u;//v的父亲节点是u
dfs(v,u);
}
}
当u, v不在同一个深度时,我们要用倍增思想把深度大的节点u调到和v在同一个深度。
int len=dep[u]-dep[v],k=0;
while(len){//对k进行二进制分解
if(len & 1) u=f[u][k];
++k;len>>=1;
}
code
#include<bits/stdc++.h>
const int maxn=1e4+5,maxe=1e5+5;
int n,len,head[maxn],dep[maxn],f[maxn][21];
struct edge{int next,to;}e[2*maxe];
void Insert(int u,int v){
e[++len].to=v;e[len].next=head[u];head[u]=len;
}
void dfs(int u,int fa){//对应深搜预处理f数组
dep[u]=dep[fa]+1;//预处理节点深度
for(int i=1;(1<<i)<=dep[u];i++)
f[u][i]=f[f[u][i-1]][i-1];//根据u的深度,预处理其2^i祖先
for(int i=head[u];i;i=e[i].next){
int v=e[i].to;
if(v==fa)continue;
f[v][0]=u;//v的父亲节点是u
dfs(v,u);
}
}
int lca(int u,int v){
if(dep[u]<dep[v])std::swap(u,v);
int len=dep[u]-dep[v],k=0;
while(len){
if(len & 1) u=f[u][k];
++k;len>>=1;
}
if(u==v)return u;
for(int i=20;i>=0;i--){//从大到小枚举
if(f[u][i]!=f[v][i]){//尽可能接近
u=f[u][i];v=f[v][i];
}
}
return f[u][0];//u,v在LCA的下一层
}
int main(){
scanf("%d",&n);
for(int i=1;i<n;i++){
int x,y;scanf("%d%d",&x,&y);
Insert(x,y);Insert(y,x);
}
dfs(1,0);
int Q;scanf("%d",&Q);
for(int i=1;i<=Q;i++){
int u,v;scanf("%d%d",&u,&v);
printf("%d\n",dep[u]+dep[v]-2*dep[lca(u,v)]);//求两个节点的LCA
}
}
时间复杂度:倍增算法的预处理时间复杂度为:O(n*log(n)) ,单次查询时间复杂度为 :O(log(n))。
RMQ之ST算法RMQ(Range Minimum/Maximum Query),即区间最值查询,是指这样一个问题:
n的数列A,回答若干询问RMQ(A,i,j)(i,j<=n),返回数列A中下标在i,j之间的最小/大值。for就可以搞定,但是如果有许多次询问就无法在很快的时间处理出来。在这里介绍一个在线算法,ST算法。ST(Sparse Table)算法是一个非常有名的在线处理RMQ问题的算法,它可以在O(nlogn)时间内进行预处理,然后在O(1)时间内回答每个查询。
ST算法主要有预处理和查询两种操作:
预处理
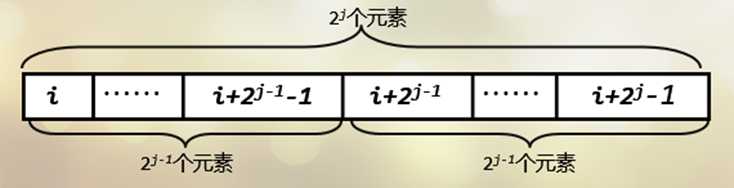
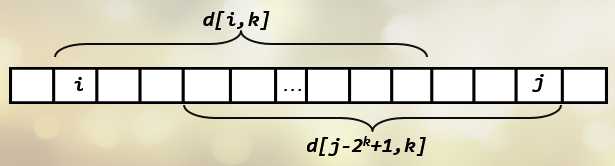
\(f[i][j]\) 表示从i开始的长度为 \(2^j\) 的一段元素的最小值,则有:
\(f[i][j]=min(f[i][j-1],f[i+2^{j-1}][j-1])\ (2^j\le n)\)
原理如图所示:
code
void Init(){//ST表初始化
for(int i=1;i<=n;++i)
f[i][0]=a[i];
for(int j=1;(1<<j)<=n;++j)//枚举区间宽度为2^j
for(int i=1;i+(1<<j)-1<=n;++i)//枚举区间起点,保证区间终点i+(1<<j)-1<=n
f[i][j]=std::max(f[i][j-1],f[i+(1<<(j-1))][j-1]);
}
查询
查询操作很简单,令k为满足 \(2^k\le R-L+1\) 的最大整数,则以L为开头,以R为结尾的两个长度为 \(2^k\) 的区间合起来即覆盖了区间[L,R].由于是取最值,有些元素重复考虑了几遍也没关系。
原理如图所示:
code
int Ask(int s,int t){//查询区间[s,t]最大值
int k=log(t-s+1)/log(2);//保证k满足 2^k<r+l-1<=2^(k+1)
return std::max(f[s][k],f[t-(1<<k)+1][k]);
}
完整代码:
#include <bits/stdc++.h>
const int maxn=1e4+5;
int n,a[maxn],f[maxn][21];
void Init(){
for(int i=1;i<=n;++i)
f[i][0]=a[i];
for(int j=1;(1<<j)<=n;++j)//枚举区间宽度为2^j
for(int i=1;i+(1<<j)-1<=n;++i)//枚举区间起点,保证区间终点i+(1<<j)-1<=n
f[i][j]=std::max(f[i][j-1],f[i+(1<<(j-1))][j-1]);
}
int Ask(int s,int t){
int k=log(t-s+1)/log(2);//保证k满足 2^k<r+l-1<=2^(k+1)
return std::max(f[s][k],f[t-(1<<k)+1][k]);
}
void Solve(){
scanf("%d",&n);//n个点的序列
for(int i=1;i<=n;++i)
scanf("%d",&a[i]);
Init();//st表的初始化
int Q;scanf("%d",&Q);
while(Q--){//q个询问
int x,y;scanf("%d%d",&x,&y);
printf("%d\n",Ask(x,y));
}
}
int main(){
Solve();
return 0;
}
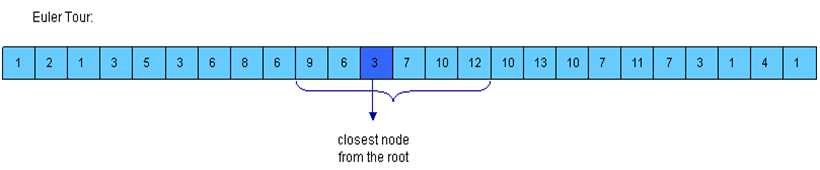
LCA在线做法算法思想:
DFS,无论是递归还是回溯,每次到达一个节点就把编号记录下来,得到一个长度为 2N?1 的序列,成为树的欧拉序列 。2n-1个节点。e[1,…,2n-1]来表示这个数组,e[i]表示第i时刻访问的节点编号,并用Firsr[x]来表示节点x第一次被访问的时间。First[u]<Firts[v]的节点u,v来说,DFS中从第一次访问u到第一次访问v所经过的路径应该是e[First[u],…,First[v]]。u的后代,但是其中深度最小的节点一定是u和v的LCA。dep[i]表示节点i的深度,那么当First[u]<=First[v]时,LCA(u,v)=RMQ(dep,First[u],First[v]);First[u]>First[v]时,LCA(u,v)=RMQ(dep,First[v],First[u]);图示:
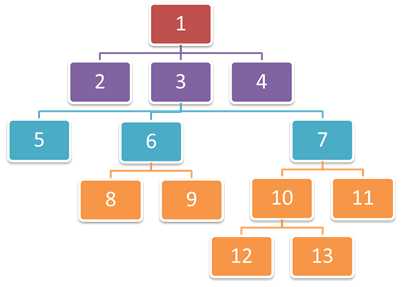
对上图,从节点1开始DFS,很容易得到如下图所示的三个数组:
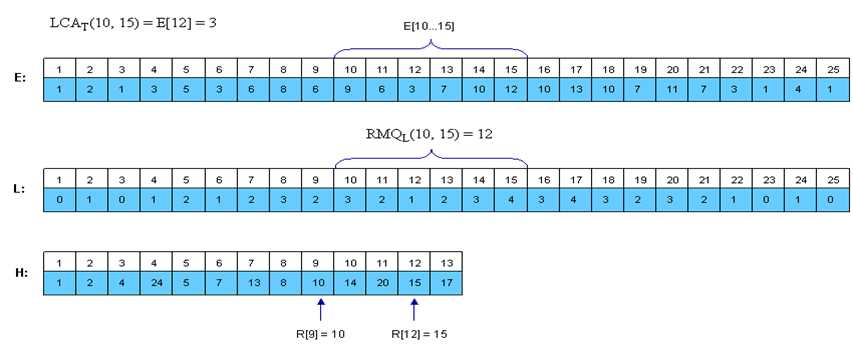
E数组记录图的欧拉序列,下标是时间戳,值是节点编号L数组记录节点的深度序列,下标是时间戳,值是节点到根的深度H数组记录节点的第一次访问时间,下标为节点,值为节点第一次访问时间。code
#include <bits/stdc++.h>
const int maxn=1e4+5;
struct Edge{
int to,next;
}a[maxn*2];
int n,e[maxn],f[maxn][21],head[maxn],len;
int Time,dep[maxn],First[maxn],vis[maxn];
void Insert(int x,int y){
a[++len].to=y;a[len].next=head[x];head[x]=len;
}
void Init(){
int N=2*n-1;//n个点欧拉序列有2*n-1个时间戳
for(int i=1;i<=N;++i)//枚举时间戳
f[i][0]=i;//i开始的长度为1的区间里深度最小的时间戳为i
for(int j=1;(1<<j)<=N;++j)//枚举区间宽度为2^j
for(int i=1;i+(1<<j)-1<=N;++i){//枚举区间起点,保证区间终点i+(1<<j)-1<=n
int x=f[i][j-1],y=f[i+(1<<j-1)][j-1];
if(dep[x]<dep[y])f[i][j]=x;
else f[i][j]=y;
}
}
int Ask(int s,int t){
int k=log(t-s+1)/log(2);//保证k满足 2^k<r+l-1<=2^(k+1)
int x=f[s][k],y=f[t-(1<<k)+1][k];
if(dep[x]<dep[y])return x;
else return y;
}
int lca(int u,int v){//lca(u,v)在时间戳[First[u],First[v]]区间dep[]最小点
int x=First[u],y=First[v];
if(x>y)std::swap(x,y);
return e[Ask(x,y)];
}
void dfs(int u,int deep){//预处理出节点深度,欧拉序列和节点第一次访问时间
vis[u]=1;e[++Time]=u;First[u]=Time;dep[Time]=deep;
for(int i=head[u];i;i=a[i].next){
int v=a[i].to;
if(!vis[v]){
dfs(v,deep+1);
e[++Time]=u;dep[Time]=deep;
}
}
}
void Solve(){
scanf("%d",&n);
for(int i=1;i<n;++i){
int x,y;scanf("%d%d",&x,&y);
Insert(x,y);Insert(y,x);
}
dfs(1,0);
Init();
int Q;scanf("%d",&Q);
while(Q--){
int x,y;scanf("%d%d",&x,&y);
printf("%d\n",lca(x,y));
}
}
int main(){
Solve();
return 0;
}
时间复杂度:预处理的时间复杂度为O(n*log(n)) ,每次查询 LCA 的时间复杂度为O(1) 。
标签:起点 解决 区间 应该 rmq off time 大整数 分解
原文地址:https://www.cnblogs.com/hbhszxyb/p/12815765.html