标签:表示 alt 处理 enc continue 图片 flight time oat
本文学习自《视觉SLAM十四讲》
双目相机通过视差来计算深度。RGBD相机则可以主动测量每个像素的深度。
RGBD相机原理图
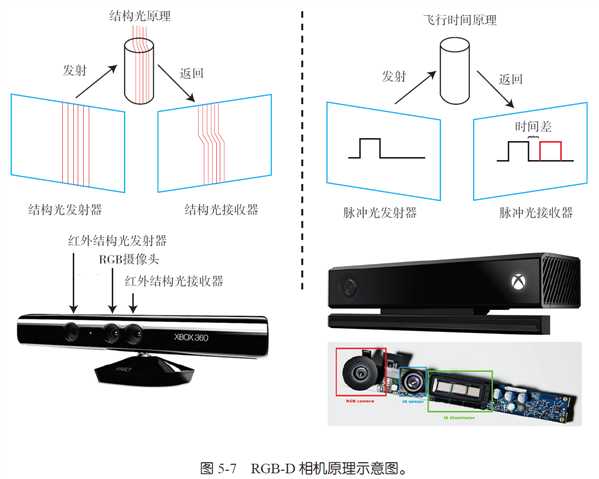
那么如何从RGBD相机提取像素的深度信息呢?
下面是一个简单的小程序,可以显示像素的深度信息.
#include <iostream>
#include <fstream>
#include <opencv2/opencv.hpp>
using namespace std;
float depthscale = 1.0f/1000; //尺度因子,表示一个像素对应多少实际中的米
int main(int argc, char **argv)
{
cv::Mat depth = cv::imread("img.jpg");
depth.convertTo(depth,CV_32FC1,depthscale);
for (int v = 0; v < depth.rows; v++)
{
for (int u = 0; u < depth.cols; u++) {
unsigned int d = depth.ptr<unsigned short>(v)[u]; // 深度值
if (d == 0)
continue; // 为0表示没有测量到
else
{
cout<<d<<"";
if(v%50==0||u%50==0)
cout<<endl;
}
}
}
return 0;
}
标签:表示 alt 处理 enc continue 图片 flight time oat
原文地址:https://www.cnblogs.com/guoben/p/12846363.html