标签:镜像端口 project source dev 范围 配置 reader 下载地址 文件夹
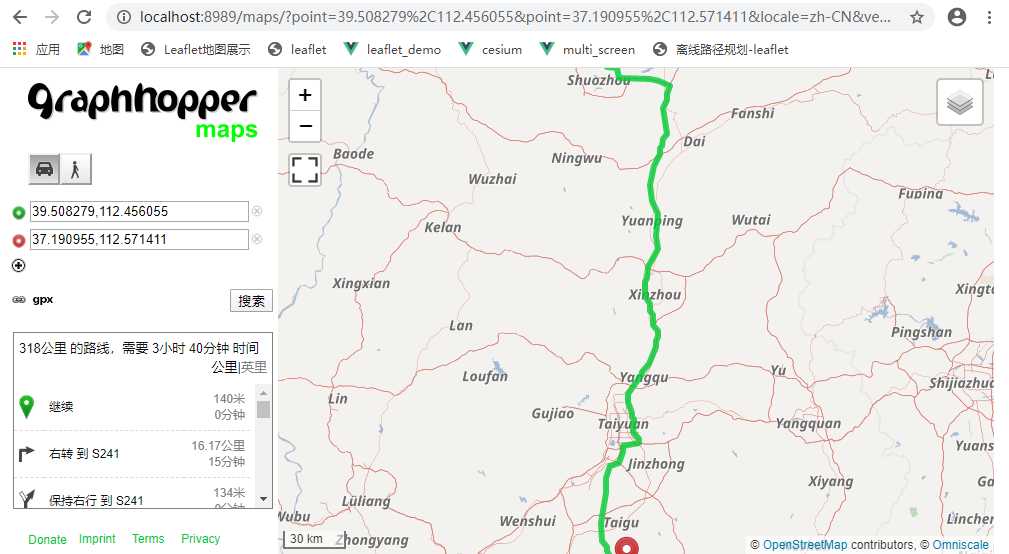
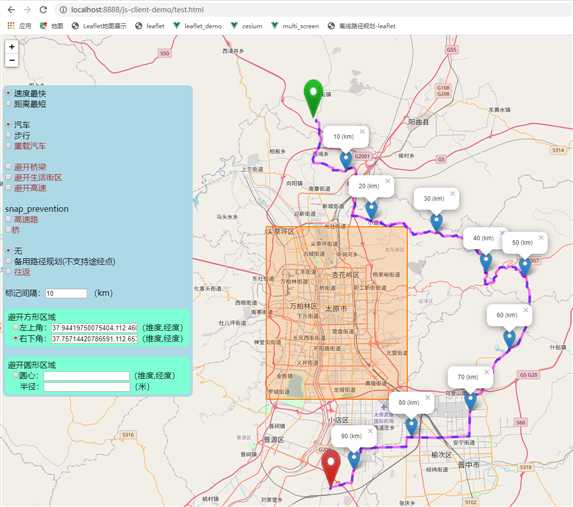
由于公司业务需求,需要一套离线路由规划服务,譬如提供出发地、目的地、途经点、交通方式、避开区域等,规划出一条或多条导航路由。离线,离线,离线。我们已经太依赖网络了。
至于展示层就随意,可选cesium、leaflet、osgEarth等。
于是乎本人就从零开始了,下面是一些关键的爬坑记录。
本人环境:win10 64位。
由于本人之前没接触过docker,所以废了好大的周折才爬完这两个坑,七窍都快冒烟了。

1.每次更新配置文件/更改数据源,需要删除graph-cache下的文件。
2.增加这两个参数,能设置起点/终点的搜索范围。
index.high_resolution: 1000000
index.max_region_search: 40
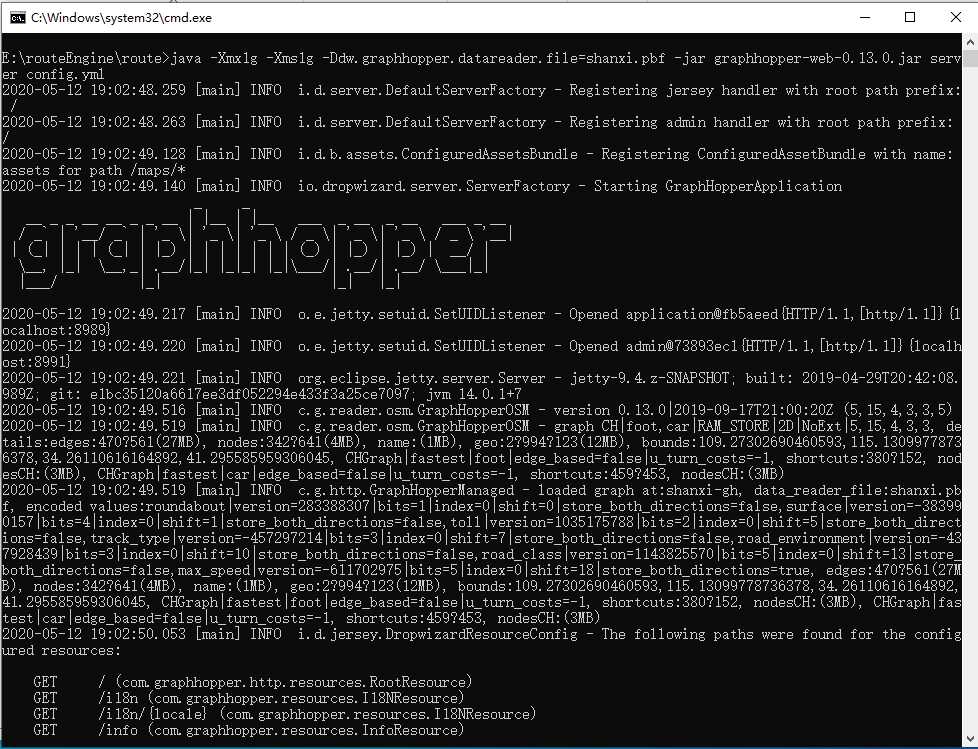
3.源码文件在:E:\routeEngine\route\graphhopper-master\core\src\main\java\com\graphhopper\GraphHopper.java 下。
4.访问这个http://localhost:8989/info能拿到一些有用的数据。
5.更改配置文件的graph.flag_encoders: car,foot,统一提供车/步行服务。
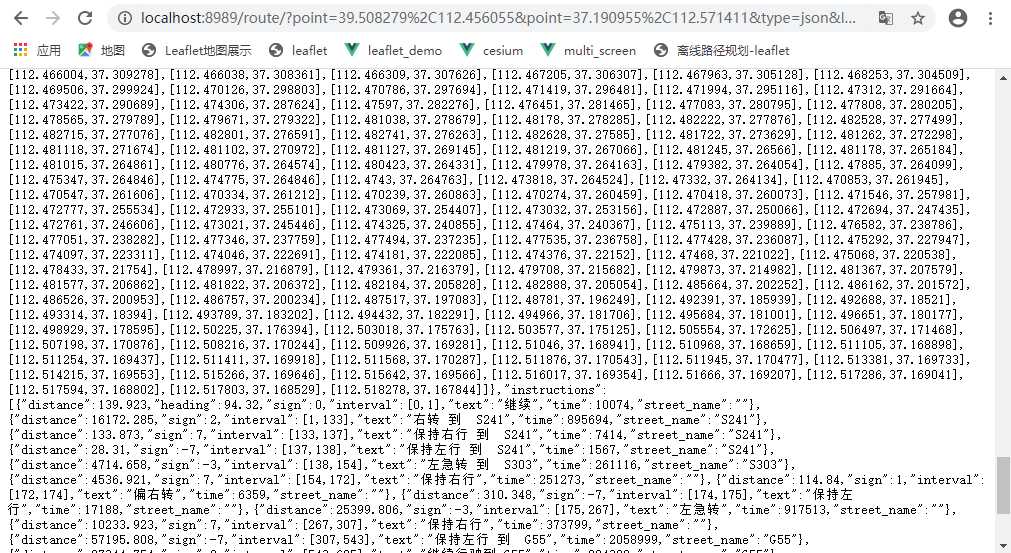
6. 请求路径后面加上ch.disable=true,就可以用weighting=fastest/shortest模式了。
个人总结:据官网介绍,osrm是可以作为一个lib与c++无缝结合的,这个有待研究,如果真这样的化,就完成摒弃了B/S架构这种模式,像osgEarth就无缝结合了。总体管局graphhoper的官网要比osrm写的详细的多,osrm运行性能要比它高,osrm可以脱离docker直接编译在win上。
个人demo下载地址:https://pan.baidu.com/s/1qQhVgsDe9zubLNjUyKZIVw 。
标签:镜像端口 project source dev 范围 配置 reader 下载地址 文件夹
原文地址:https://www.cnblogs.com/airduce/p/12878163.html