标签:方法 构建 lin 公式 begin 更新 个数 关于 enter
感知机是一个线性分类器,感知机的公式是
其中
感知机说得是我们有一系列的点x = (x1,x2,x3...xn)和相应的参数w = (w1,w2,w3....wn),我们将x和w向量进行乘积操作,最终会得到一个数字,如果这个数字大于等于0,那么我们将其归为+1类别,否则,归为-1类别。
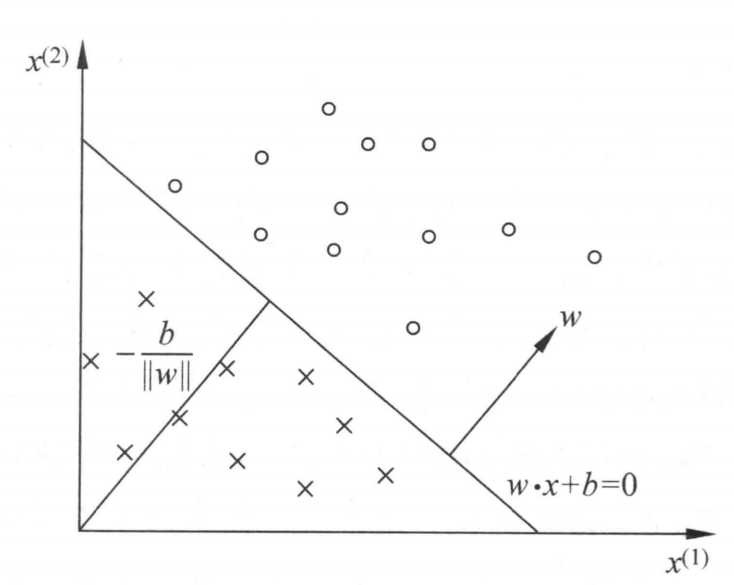
关于\(wx+b\)可以理解为一个超平面,展开就是\(w_{1} x_{1} + w_{2}x_{2} +w_{3}x_{3} + ...... +b\),当\(wx+b = 0\)时,其表示的就是一个超平面,在二维空间如下图所示
那么我们如何学习感知机的参数w呢?我们的策略就是构建损失函数,那么如何构建损失函数呢?我们想到的一种方法是误分类点的个数作为损失函数,但是这种方法的结果对w和b不可导,那么,我们就想出了另外一种策略,对于误分类的数据,其有一个性质
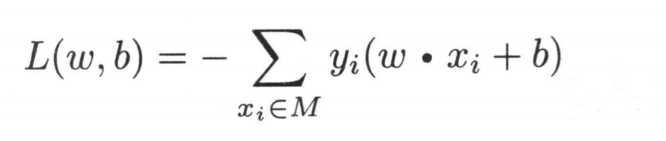
当\(y_{i} = +1,wx_{i} + b = -1\)时,\(-y_{i} (wx_{i} + b) > 0\),当\(y_{i} = -1,wx_{i} + b = +1\)时,\(-y_{i} (wx_{i} + b) > 0\),那对于分类正确的点怎么办呢?很简单,我们就不管他就行,或者他们的损失就是0,我们加上0就可以了。所以我们的损失函数就是所有误分类点的集合,如下面公式所示
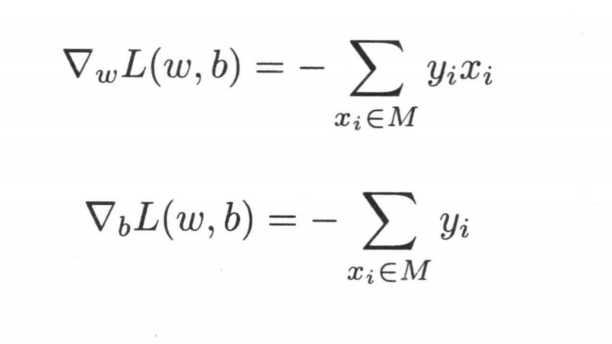
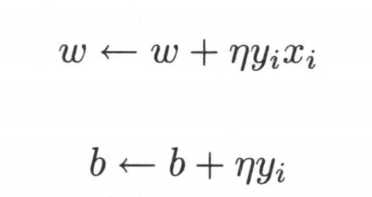
那我们如何来求解w和b呢,常用的策略就是对相应的参数进行求导,利用梯度下降法更新参数,求导结果为
标签:方法 构建 lin 公式 begin 更新 个数 关于 enter
原文地址:https://www.cnblogs.com/stephen-goodboy/p/12882258.html