标签:apr glob info between pool UNC log tar zha
在调参记录14里,只有2个残差模块,结果遭遇欠拟合了。这次增加一个残差模块试试。
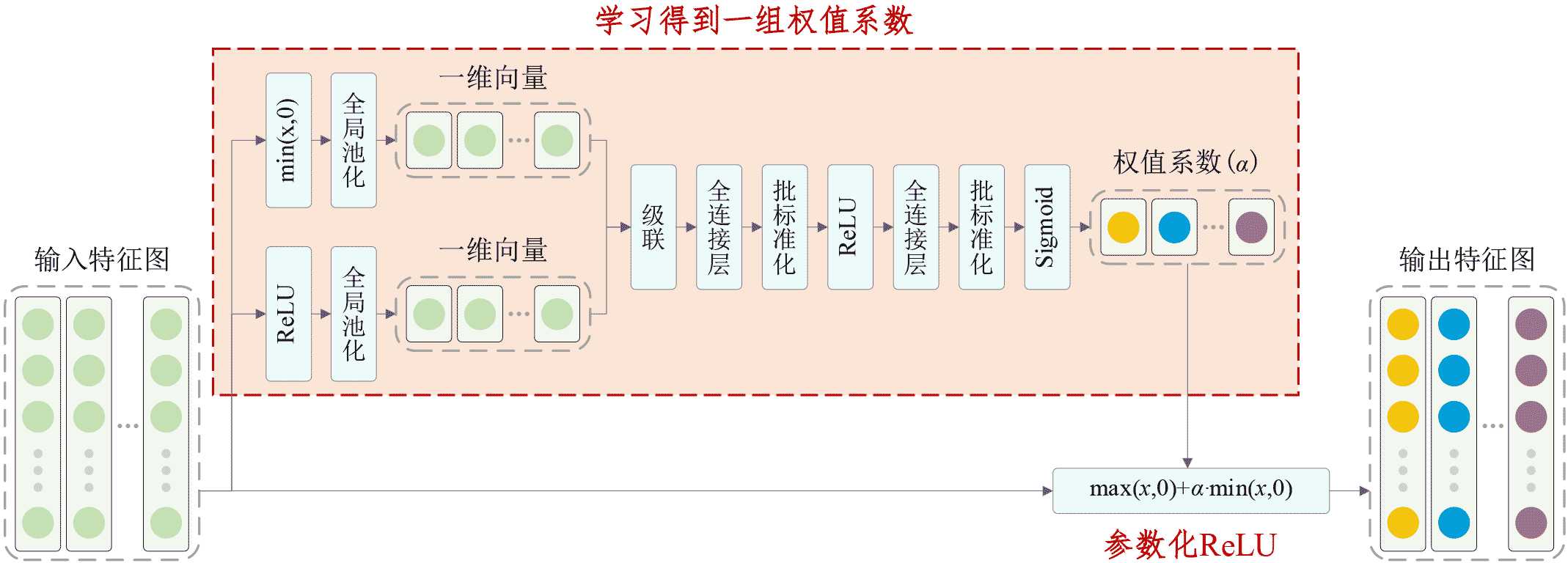
自适应参数化ReLU激活函数的基本原理如下:
Keras程序如下:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Tue Apr 14 04:17:45 2020
Implemented using TensorFlow 1.0.1 and Keras 2.2.1
Minghang Zhao, Shisheng Zhong, Xuyun Fu, Baoping Tang, Shaojiang Dong, Michael Pecht,
Deep Residual Networks with Adaptively Parametric Rectifier Linear Units for Fault Diagnosis,
IEEE Transactions on Industrial Electronics, 2020, DOI: 10.1109/TIE.2020.2972458
@author: Minghang Zhao
"""
from __future__ import print_function
import keras
import numpy as np
from keras.datasets import cifar10
from keras.layers import Dense, Conv2D, BatchNormalization, Activation, Minimum
from keras.layers import AveragePooling2D, Input, GlobalAveragePooling2D, Concatenate, Reshape
from keras.regularizers import l2
from keras import backend as K
from keras.models import Model
from keras import optimizers
from keras.preprocessing.image import ImageDataGenerator
from keras.callbacks import LearningRateScheduler
K.set_learning_phase(1)
# The data, split between train and test sets
(x_train, y_train), (x_test, y_test) = cifar10.load_data()
# Noised data
x_train = x_train.astype(‘float32‘) / 255.
x_test = x_test.astype(‘float32‘) / 255.
x_test = x_test-np.mean(x_train)
x_train = x_train-np.mean(x_train)
print(‘x_train shape:‘, x_train.shape)
print(x_train.shape[0], ‘train samples‘)
print(x_test.shape[0], ‘test samples‘)
# convert class vectors to binary class matrices
y_train = keras.utils.to_categorical(y_train, 10)
y_test = keras.utils.to_categorical(y_test, 10)
# Schedule the learning rate, multiply 0.1 every 1500 epoches
def scheduler(epoch):
if epoch % 1500 == 0 and epoch != 0:
lr = K.get_value(model.optimizer.lr)
K.set_value(model.optimizer.lr, lr * 0.1)
print("lr changed to {}".format(lr * 0.1))
return K.get_value(model.optimizer.lr)
# An adaptively parametric rectifier linear unit (APReLU)
def aprelu(inputs):
# get the number of channels
channels = inputs.get_shape().as_list()[-1]
# get a zero feature map
zeros_input = keras.layers.subtract([inputs, inputs])
# get a feature map with only positive features
pos_input = Activation(‘relu‘)(inputs)
# get a feature map with only negative features
neg_input = Minimum()([inputs,zeros_input])
# define a network to obtain the scaling coefficients
scales_p = GlobalAveragePooling2D()(pos_input)
scales_n = GlobalAveragePooling2D()(neg_input)
scales = Concatenate()([scales_n, scales_p])
scales = Dense(channels//8, activation=‘linear‘, kernel_initializer=‘he_normal‘, kernel_regularizer=l2(1e-4))(scales)
scales = BatchNormalization(momentum=0.9, gamma_regularizer=l2(1e-4))(scales)
scales = Activation(‘relu‘)(scales)
scales = Dense(channels, activation=‘linear‘, kernel_initializer=‘he_normal‘, kernel_regularizer=l2(1e-4))(scales)
scales = BatchNormalization(momentum=0.9, gamma_regularizer=l2(1e-4))(scales)
scales = Activation(‘sigmoid‘)(scales)
scales = Reshape((1,1,channels))(scales)
# apply a paramtetric relu
neg_part = keras.layers.multiply([scales, neg_input])
return keras.layers.add([pos_input, neg_part])
# Residual Block
def residual_block(incoming, nb_blocks, out_channels, downsample=False,
downsample_strides=2):
residual = incoming
in_channels = incoming.get_shape().as_list()[-1]
for i in range(nb_blocks):
identity = residual
if not downsample:
downsample_strides = 1
residual = BatchNormalization(momentum=0.9, gamma_regularizer=l2(1e-4))(residual)
residual = aprelu(residual)
residual = Conv2D(out_channels, 3, strides=(downsample_strides, downsample_strides),
padding=‘same‘, kernel_initializer=‘he_normal‘,
kernel_regularizer=l2(1e-4))(residual)
residual = BatchNormalization(momentum=0.9, gamma_regularizer=l2(1e-4))(residual)
residual = aprelu(residual)
residual = Conv2D(out_channels, 3, padding=‘same‘, kernel_initializer=‘he_normal‘,
kernel_regularizer=l2(1e-4))(residual)
# Downsampling
if downsample_strides > 1:
identity = AveragePooling2D(pool_size=(1,1), strides=(2,2))(identity)
# Zero_padding to match channels
if in_channels != out_channels:
zeros_identity = keras.layers.subtract([identity, identity])
identity = keras.layers.concatenate([identity, zeros_identity])
in_channels = out_channels
residual = keras.layers.add([residual, identity])
return residual
# define and train a model
inputs = Input(shape=(32, 32, 3))
net = Conv2D(16, 3, padding=‘same‘, kernel_initializer=‘he_normal‘, kernel_regularizer=l2(1e-4))(inputs)
net = residual_block(net, 1, 16, downsample=False)
net = residual_block(net, 1, 32, downsample=True)
# net = residual_block(net, 2, 32, downsample=False)
net = residual_block(net, 1, 64, downsample=True)
# net = residual_block(net, 2, 64, downsample=False)
net = BatchNormalization(momentum=0.9, gamma_regularizer=l2(1e-4))(net)
net = aprelu(net)
net = GlobalAveragePooling2D()(net)
outputs = Dense(10, activation=‘softmax‘, kernel_initializer=‘he_normal‘, kernel_regularizer=l2(1e-4))(net)
model = Model(inputs=inputs, outputs=outputs)
sgd = optimizers.SGD(lr=0.1, decay=0., momentum=0.9, nesterov=True)
model.compile(loss=‘categorical_crossentropy‘, optimizer=sgd, metrics=[‘accuracy‘])
# data augmentation
datagen = ImageDataGenerator(
# randomly rotate images in the range (deg 0 to 180)
rotation_range=30,
# Range for random zoom
zoom_range = 0.2,
# shear angle in counter-clockwise direction in degrees
shear_range = 30,
# randomly flip images
horizontal_flip=True,
# randomly shift images horizontally
width_shift_range=0.125,
# randomly shift images vertically
height_shift_range=0.125)
reduce_lr = LearningRateScheduler(scheduler)
# fit the model on the batches generated by datagen.flow().
model.fit_generator(datagen.flow(x_train, y_train, batch_size=1000),
validation_data=(x_test, y_test), epochs=5000,
verbose=1, callbacks=[reduce_lr], workers=4)
# get results
K.set_learning_phase(0)
DRSN_train_score = model.evaluate(x_train, y_train, batch_size=1000, verbose=0)
print(‘Train loss:‘, DRSN_train_score[0])
print(‘Train accuracy:‘, DRSN_train_score[1])
DRSN_test_score = model.evaluate(x_test, y_test, batch_size=1000, verbose=0)
print(‘Test loss:‘, DRSN_test_score[0])
print(‘Test accuracy:‘, DRSN_test_score[1])
实验结果如下:
Epoch 2575/5000 10s 197ms/step - loss: 0.3505 - acc: 0.9039 - val_loss: 0.4548 - val_acc: 0.8745 Epoch 2576/5000 10s 198ms/step - loss: 0.3571 - acc: 0.9003 - val_loss: 0.4483 - val_acc: 0.8732 Epoch 2577/5000 10s 194ms/step - loss: 0.3536 - acc: 0.9033 - val_loss: 0.4547 - val_acc: 0.8725 Epoch 2578/5000 10s 196ms/step - loss: 0.3514 - acc: 0.9033 - val_loss: 0.4429 - val_acc: 0.8766
程序还没跑完,似乎也没必要跑完了。
训练集上还没拟合得很好,测试集准确率已经低于训练集准确率大约2.5%了。这是同时存在欠拟合和过拟合呀!
Minghang Zhao, Shisheng Zhong, Xuyun Fu, Baoping Tang, Shaojiang Dong, Michael Pecht, Deep Residual Networks with Adaptively Parametric Rectifier Linear Units for Fault Diagnosis, IEEE Transactions on Industrial Electronics, 2020, DOI: 10.1109/TIE.2020.2972458
https://ieeexplore.ieee.org/document/8998530
标签:apr glob info between pool UNC log tar zha
原文地址:https://www.cnblogs.com/shisuzanian/p/12915348.html