标签:旋转 这一 medium family 估计 mic 估算 code span
如何估算各种物体的重心
摘要
本文介绍了一种增强学习算法,该算法通过机器人操作来学习物理材料组成未知的任意物体的质心。机器人学习是通过一系列动作来操纵对象。该算法的有效性在仿真中得到了证明,它可以定位形状复杂,质量分布均匀或不均匀的岩石的质心,并通过在模拟和实际实验中沿沿其学习的质心垂直堆叠岩石来证实。
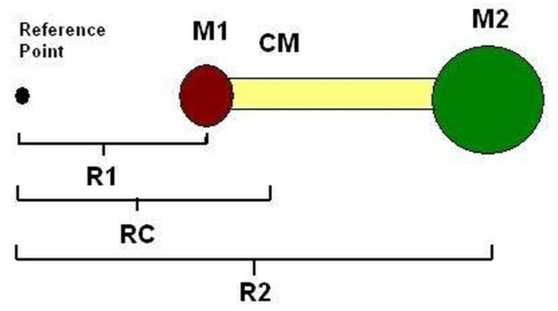
图1
质心是物体质量集中的点。因此,它用于计算力和力矩对物体的影响。它是物体在受到扭矩作用时围绕其旋转的点。使用对象外部的参考点和对象在该参考点不同距离处的质量计算质心。
在要计算质心的对象外部选择一个参考点。这一点是任意的,但应该合理地接近目标。
将物体的质量(M)乘以物体与参考点(R)之间的距离。以上图为例,二维物体一端的10磅重为M1,另一端的30磅重为M2。R1等于5英寸,R2等于15英寸。对于该系统,M1 x R1=10 x 5=50,M2 x R2=30 x 15=450。

图2
添加上述步骤的结果。例如,50+450=500。加M1和M2。例如,30+10=40。 将步骤3的总和除以步骤4的结果,得到系统相对于参考点的质心。例如,500/40=12.5英寸。
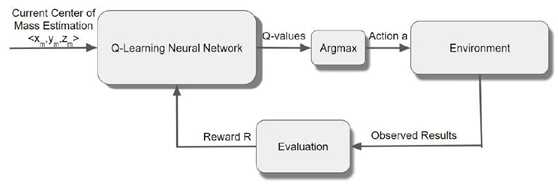
图3 质心估计的Q学习算法。
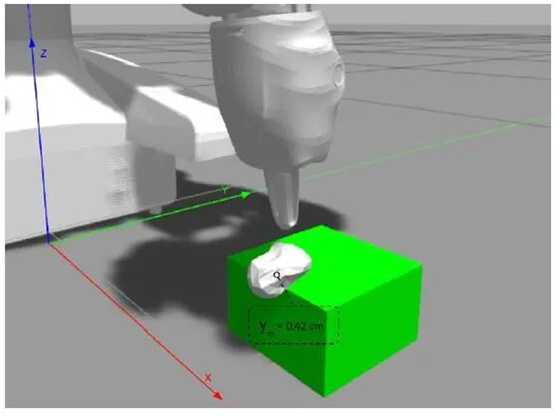
图4 岩石2的质心的学习。
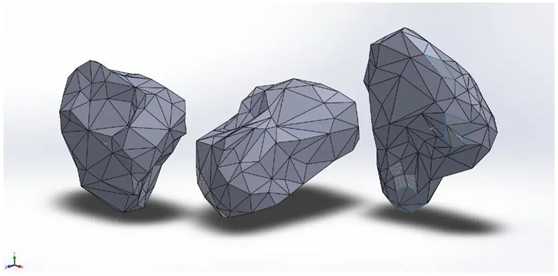
图5 具有均匀质量分布的岩石模型。岩石1、2和3从右到左显示。
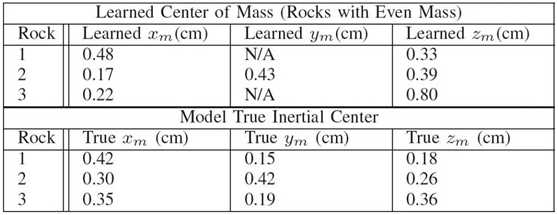
表1 将岩石的学习质量中心与真实惯性中心进行比较。N / A表示在不同姿势下找不到的质心中心。
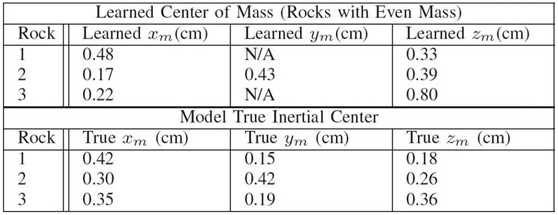
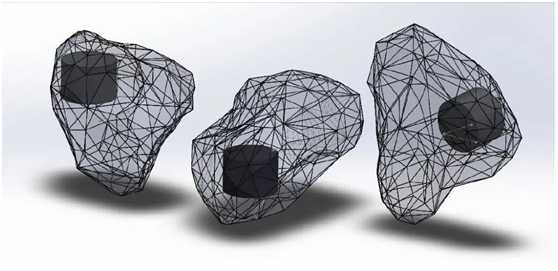
图6 质量分布不均匀的岩石模型。岩石1、2和3从右到左显示。
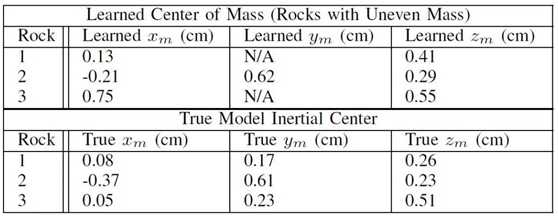
表2 质量分布不均的岩石的学习质心和真实惯性心之间的比较
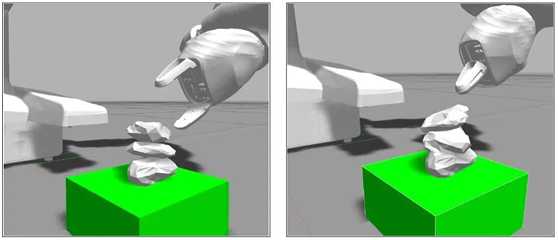
图7 垂直堆叠的岩石在不同的布置

图8 使用熊猫机器人和堆积的岩石设置真实世界的实验
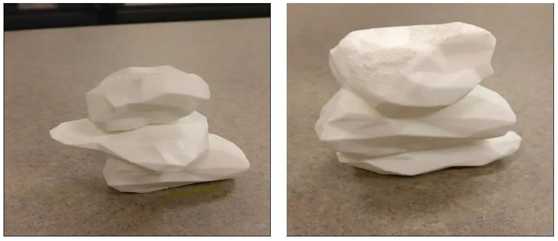
图9 现实世界中以不同布置堆叠的岩石
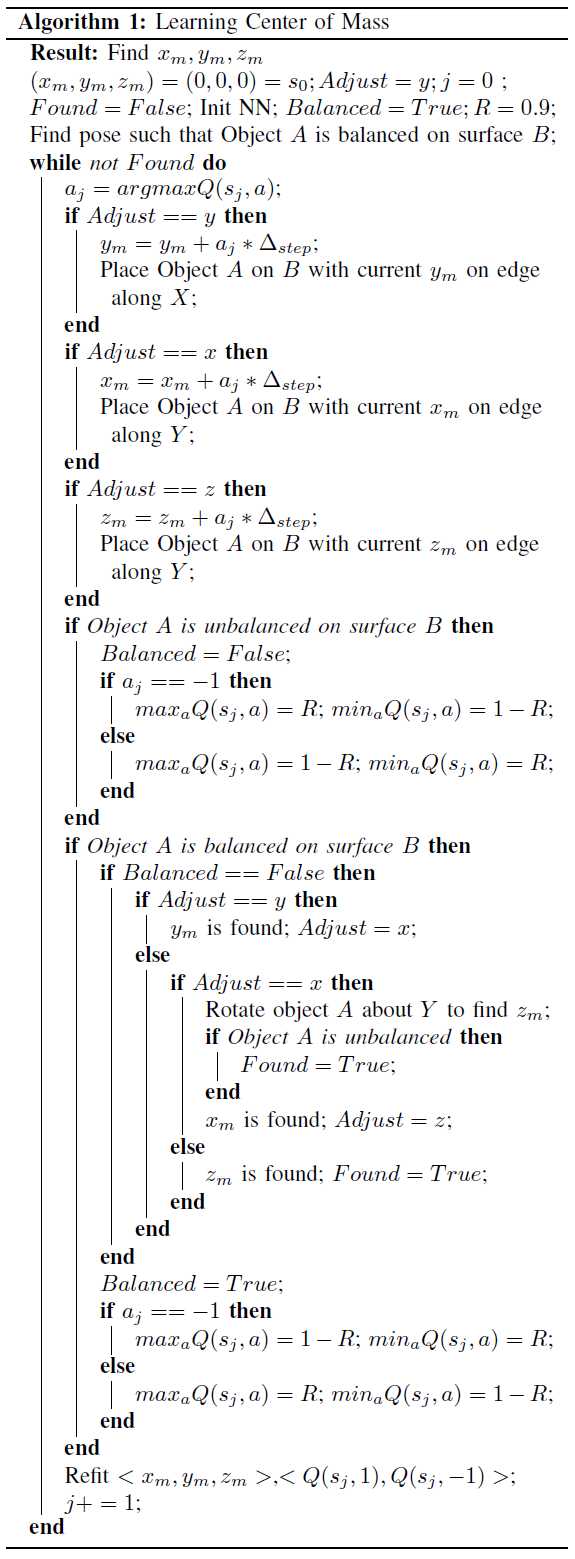
图10 大众学习中心算法流程
标签:旋转 这一 medium family 估计 mic 估算 code span
原文地址:https://www.cnblogs.com/wujianming-110117/p/12945686.html