标签:深度 png 线索 正数 指定 inline 浮点数 应该 视锥
1.简介
基本是翻译和补充 http://www.songho.ca/opengl/gl_projectionmatrix.html
计算机显示器是一个2D的平面,一个3D的场景要被OpenGL渲染必须被投影到2D平面上以生成2D的图像。在OpenGL中,GL_PROJECTION矩阵可以用来进行投影变换。首先,它将所有的顶点数据从相机坐标系(eye coordinates)转换到裁剪坐标系(clip coordinates),然后通过除以裁剪空间坐标的w值,将裁剪空间坐标系转换到归一化设备坐标系(normalized device coordinates,NDC)
我们需要注意的一点就是,裁剪和NDC变换都通过GL_PROJECTION矩阵来完成。之后的文章,将会利用6个参数来构建投影矩阵,这六个参数是:left,right,bottom,top,near,far,分别为近裁剪面的左右下上边界,近裁剪面,远裁剪面。
视锥体剔除是在裁剪坐标下进行的,在转换到NDC坐标系之前。已经变换到裁剪坐标系的坐标\(x_c,y_c,z_c\)会和\(w_c\)进行比较,如果裁剪坐标大于\(w_c\)或小于\(-w_c\),则顶点会被剔除,OpenGL会重建多边形的边。
ps.解释一下为什么要和\(w_c\)进行比较。因为NDC坐标的范围是\([-1,1]\),而裁剪坐标和NDC坐标之间的关系是\(x_c/w_c = x_n\),所以\(x_c\)必须得在\([-w_c,w_c]\)之间才可见,其他两个轴同理。不是在NDC坐标阶段进行裁剪,是因为不可见的顶点,没有必要在对其进行运算,会消耗资源。在作用完投影矩阵后,得到的是齐次坐标,OpenGL会自动除以\(w_c\),以得到笛卡尔坐标,OpenGL应该是在除以\(w_c\)之前进行视锥体剔除工作。
2.透视投影
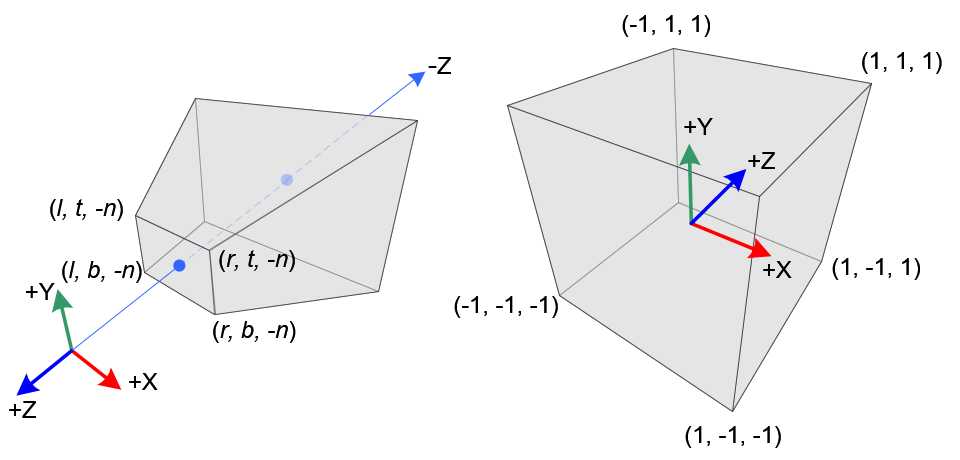
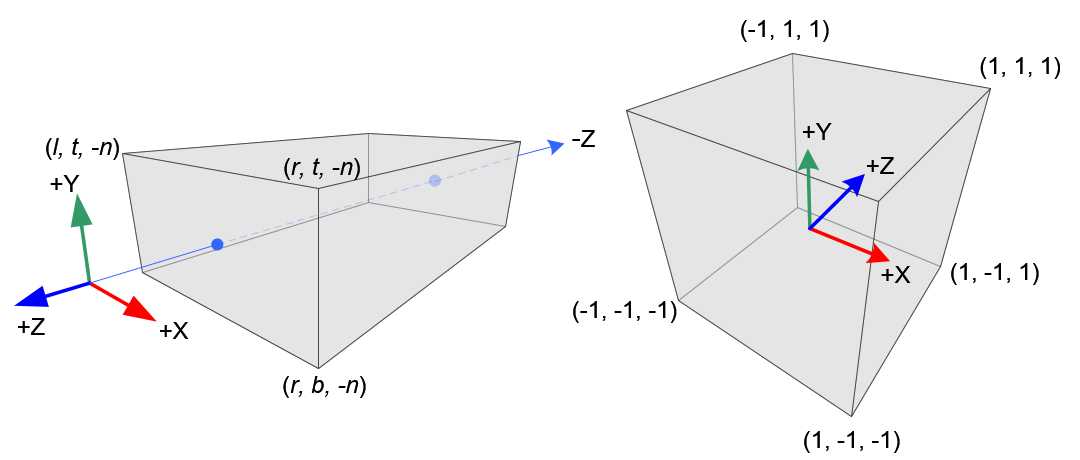
在透视投影中,1个3D的点在一个像被切了一刀的金字塔的视锥体中,此时的坐标系是相机坐标系,这个坐标系会被映射正方体的NDC坐标系中。
- \(x:[l,r]->[-1,1]\)
- \(y:[b,t]->[-1,1]\)
- \(z:[-n,-f]->[-1,1]\)
相机坐标系定义在右手坐标系,NDC是左手坐标系,所以相机朝着-Z的方向看去,而NDC朝着+Z的方向看去。因为glFrustum()裁剪面的参数必须为正数,所以在创建投影矩阵的时候,我们要对其进行去取反。
ps.glFrustum是opengl类库中的函数,它是将当前矩阵与一个透视矩阵相乘,把当前矩阵转变成透视矩阵,在使用它之前,通常会先调用glMatrixMode(GL_PROJECTION).
void glFrustum(GLdouble left, GLdouble right, GLdouble bottom, GLdouble top, GLdouble nearVal, GLdouble farVal),left,right指明相对于垂直平面的左右坐标位置,bottom,top指明相对于水平剪切面的下上位置,nearVal,farVal指明相对于深度剪切面的远近的距离,两个必须为正数。
在OpenGL中,1个3D的点将会被投影到近裁剪平面上,下图展示了点\((x_e,y_e,z_e)\)如何投影到\((x_p,y_p,z_p)\)。
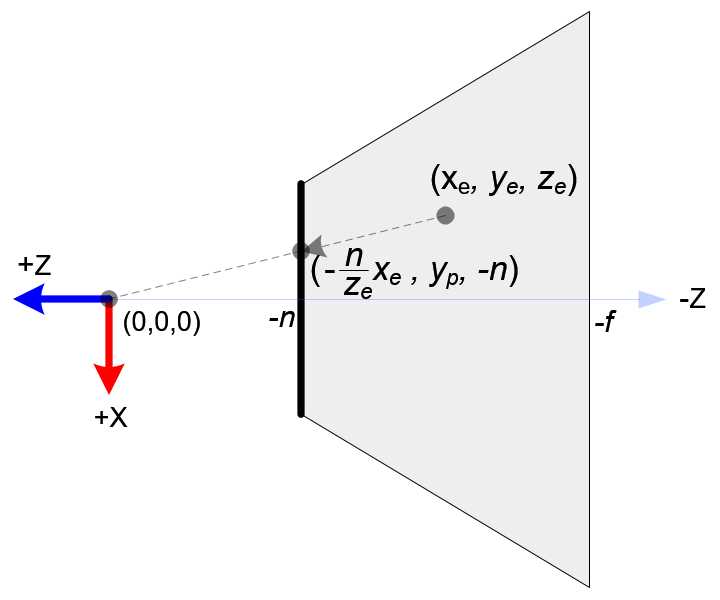
在视锥体的顶视图,我们可以利用相似三角形计算\(x_p\)的值
\[\frac{x_p}{x_e} = \frac{-n}{z_e}\x_p = \frac{-nx_e}{z_e}=\frac{nx_e}{-z_e}
\]
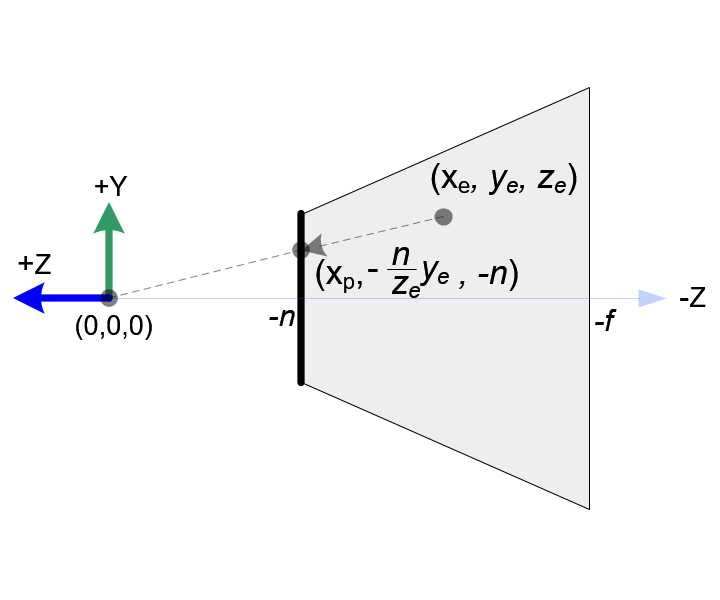
同理,在侧视图中,利用相似三角形计算\(y_p\)的值
\[\frac{y_p}{y_e} = \frac{-n}{z_e}\y_p = \frac{-ny_e}{z_e}=\frac{ny_e}{-z_e}
\]
我们观察到\(x_p,y_p\)都依赖于\(z_e\),他们都除以\(z_e\),这是第一个线索,来帮助我们构建透视投影矩阵。当相机坐标系经过透视投影矩阵变换后,得到的是裁剪坐标系的齐次坐标,最后通过除以齐次坐标的\(w_c\),来得到NDC
\[\begin{bmatrix}
x_c\ y_c\ z_c\ w_c
\end{bmatrix}
=M_{projection}
\begin{bmatrix}
x_e\ y_e\ z_e\ w_e
\end{bmatrix}
,
\begin{bmatrix}
x_n\ y_n\ z_n\\end{bmatrix}
=
\begin{bmatrix}
x_c/w_c\ y_c/w_c\ z_c/w_c\\end{bmatrix}
\]
因此我们可以设置\(w_c\)的值为\(-z_e\),现在投影矩阵看起来是
\[\begin{bmatrix}
x_c\ y_c\ z_c\ w_c
\end{bmatrix}
=
\begin{bmatrix}
.&.&.&.\ .&.&.&.\ .&.&.&.\ 0&0&-1&0\\end{bmatrix}
\begin{bmatrix}
x_e\ y_e\ z_e\ w_e
\end{bmatrix}
\]
接着,我们需要将\(x_p,y_p\)映射到\(x_n,y_n\),\([l,r]->[-1,1],[b,t]->[-1,1]\)。
相当于是给定l,我要得到-1,给定r,我要得到1,这不就是给定二维平面上的两个点,求其直线方程的问题。
\[令x_n = kx_p+\beta,求其斜率为\frac{1-(-1)}{r-l}=\frac{2}{r-l}\带入点(r,1),1 = \frac{2r}{r-l}+\beta\化简求得\beta=-\frac{r+l}{r-l}\最终得x_n = \frac{2x_p}{r-l}-\frac{r+l}{r-l}
\]
\[令y_n = ky_p+\beta,求其斜率为\frac{1-(-1)}{t-b}=\frac{2}{t-b}\带入点(t,1),1 = \frac{2t}{t-b}+\beta\化简求得\beta=-\frac{t+b}{t-b}\最终得y_n = \frac{2y_p}{t-b}-\frac{t+b}{t-b}
\]
现在有了从\(x_e,y_e\)到\(x_p,y_p\)和从\(x_p,y_p\)到\(x_n,y_n\),现在联立一下就可以得到从\(x_e,y_e\)到\(x_n,y_n\)的关系表达式。
\[x_n = \frac{2x_p}{r-l}-\frac{r+l}{r-l}\x_p = \frac{-nx_e}{z_e}=\frac{nx_e}{-z_e}\最终可以化简为(\underbrace{\frac{2n}{r-l}x_e+\frac{r+l}{r-l}z_e}_{x_c})/-z_e
\]
同理
\[y_n = \frac{2y_p}{t-b}-\frac{t+b}{t-b}\y_p = \frac{-ny_e}{z_e}=\frac{ny_e}{-z_e}\最终可以化简为(\underbrace{\frac{2n}{t-b}y_e+\frac{t+b}{t-b}z_e}_{y_c})/-z_e
\]
现在我们的透视矩阵现在是这个样子
\[\begin{bmatrix}
x_c\ y_c\ z_c\ w_c
\end{bmatrix}
=
\begin{bmatrix}
\frac{2n}{r-l}&0&\frac{r+l}{r-l}&0\ 0&\frac{2n}{t-b}&\frac{t+b}{t-b}&0\ .&.&.&.\ 0&0&-1&0\\end{bmatrix}
\begin{bmatrix}
x_e\ y_e\ z_e\ w_e
\end{bmatrix}
\]
现在还剩下矩阵的第三行。\(z_n\)和其他两个轴的坐标稍有不同,因为\(z_e\)总是投影到-n的近裁剪面,但是我们需要不同的z值来进行裁剪和深度测试,另外我们应该可以进行逆操作(逆变换)。因为我们知道z的值不依赖于x,y,我们借用w的值来寻找\(z_n,z_e\)之间的关系,因此我们指定第三行矩阵为
\[\begin{bmatrix}
x_c\ y_c\ z_c\ w_c
\end{bmatrix}
=
\begin{bmatrix}
\frac{2n}{r-l}&0&\frac{r+l}{r-l}&0\ 0&\frac{2n}{t-b}&\frac{t+b}{t-b}&0\ 0&0&A&B\ 0&0&-1&0\\end{bmatrix}
\begin{bmatrix}
x_e\ y_e\ z_e\ w_e
\end{bmatrix}
\]
\[z_n = z_c/w_c = \frac{Az_e+Bw_e}{-z_e}
\]
在相机坐标系中,\(w_e\)的值是1,因此有\(z_n = \frac{Az_e+B}{-z_e}\),为了获得A和B的值,我们使用\((z_e,z_n)\)的关系,\((-n,-1),(-f,1)\),然后将他们代入表达式。
\[\frac{-An+B}{n}=-1\\frac{-Af+B}{f}=1
\]
联立,这是一个简单二元一次方程组,容易求得
\[A = -\frac{f+n}{f-n}\B = -\frac{2fn}{f-n}
\]
所以最终得到
\[z_n = \frac{-\frac{f+n}{f-n}z_e--\frac{2fn}{f-n}}{-z_e}
\]
最终整个投影矩阵的表达式为
\[\begin{bmatrix}
x_c\ y_c\ z_c\ w_c
\end{bmatrix}
=
\begin{bmatrix}
\frac{2n}{r-l}&0&\frac{r+l}{r-l}&0\ 0&\frac{2n}{t-b}&\frac{t+b}{t-b}&0\ 0&0&-\frac{f+n}{f-n}&-\frac{2fn}{f-n}\ 0&0&-1&0\\end{bmatrix}
\begin{bmatrix}
x_e\ y_e\ z_e\ w_e
\end{bmatrix}
\]
这个投影矩阵是一般的视锥体,如果是对称的话,有\(r=-l,t=-b\),那么有
\[r+l=0,r-l=2r(width)\t+b=0,t-b=2t(height)
\]
最后矩阵可以简单的化为
\[\begin{bmatrix}
\frac{n}{r}&0&0&0\ 0&\frac{n}{t}&0&0\ 0&0&-\frac{f+n}{f-n}&-\frac{2fn}{f-n}\ 0&0&-1&0\\end{bmatrix}
\]
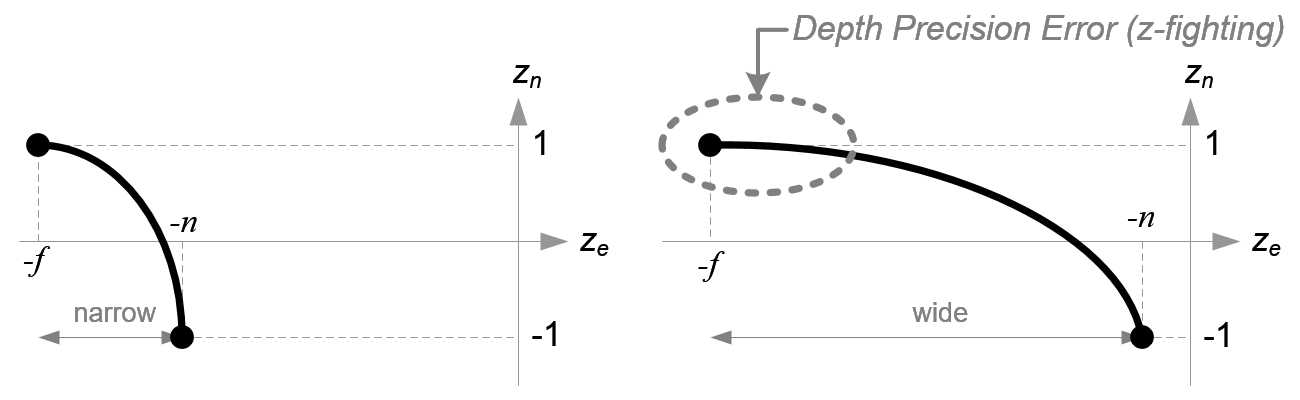
注意观察\(z_e,z_n\)的关系式,这是一个非线性的反比例函数,这意味着,在近裁剪平面的是很好,精度很高,而在远裁剪面的时候,精度很低。当\([-n,-f]\)很大时,可能导致深度精度问题(z-fighting),一个较小的\(z_e\)的变化,在远裁剪面可能不会影响\(z_n\)的值,n和f之间的距离应该短一些,从而最小化这个问题。
ps.因为浮点数会存在精度问题,毕竟计算机的存储是离散的。
3.正交投影
正交投影的要比透视投影简单许多,\(x_e,y_e,z_e\)相机坐标系将会线性映射到NDC坐标系。我们仅需要将长方体变为正方体,然后移动至原点。
\[x_n = \frac{1-(-1)}{r-l}x_e+\beta\代入(r,1),最终可得\x_n = \frac{2}{r-l}x_e-\frac{r+l}{r-l}
\]
同理
\[y_n = \frac{1-(-1)}{t-b}y_e+\beta\代入(t,1),最终可得\y_n = \frac{2}{t-b}y_e-\frac{t+b}{t-b}
\]
同理
\[z_n = \frac{1-(-1)}{-f-(-n)}z_e+\beta\代入(-f,1),最终可得\z_n = \frac{-2}{f-n}z_e-\frac{f+n}{f-n}
\]
因为w的值在正交投影中不必要,所以我们设置为1,因此正交投影矩阵为
\[
\begin{bmatrix}
\frac{2}{r-l}&0&0&-\frac{r+l}{r-l}\ 0&\frac{2}{t-b}&0&-\frac{t+b}{t-b}\ 0&0&-\frac{2}{f-n}&-\frac{f+n}{f-n}\ 0&0&0&1\\end{bmatrix}
\]
同透视投影一样,如果是对称的话,那么就可以矩阵就可以变简单
\[
\begin{bmatrix}
\frac{1}{r}&0&0&0\ 0&\frac{1}{t}&0&0\ 0&0&-\frac{2}{f-n}&-\frac{f+n}{f-n}\ 0&0&0&1\\end{bmatrix}
\]
[OpenGL](翻译+补充)投影矩阵的推导
标签:深度 png 线索 正数 指定 inline 浮点数 应该 视锥
原文地址:https://www.cnblogs.com/WAoyu/p/13049555.html