标签:slam rip 情况下 方向 视觉 inline 良好的 s2d 注意
经典 SLAM 模型中以位姿 路标( Landmark )来描述 SLAM 过程
? 路标是三维空间中固定不变的点,能够在特定位姿下观测到
? 数量充足,以实现良好的定位
? 较好的区分性,以实现数据关联
在视觉 SLAM 中,可利用图像特征点作为 SLAM 中的路标
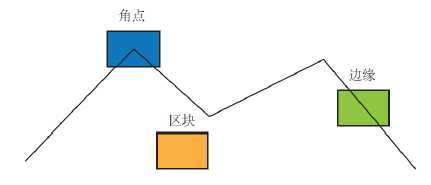
特征点是图像中具有代表性的部分;
具有可重复性,可区别性,高效,本地的特点
特征点的信息
? 位置、大小、方向、评分等 关键点
? 特征点周围的图像信息 描述子( Descriptor)
特征描述应该在光照、视角发生少量变化时仍能保持一致
例子:SIFT/SURF/ORB(见 OpenCV features2d 模块)
关键点: Oriented FAST
描述: BRIEF
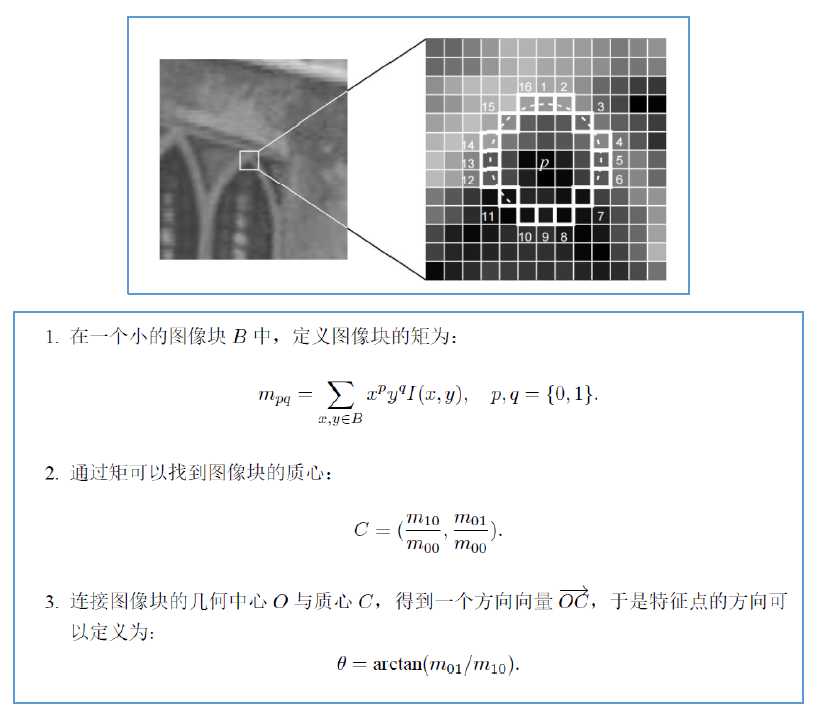
? 连续 N 个点的灰度有明显差异
? 在 FAST 基础上计算旋转
? BRIEF 128 :在特征点附近的 128 次像素比较
? ORB :旋转之后的 BRIEF 描述
BRIEF 是一种二进制描述,需要用汉明距离度量
目的: 通过描述子的差异判断哪些特征为同一个点
暴力匹配:比较图 1 中每个特征和图 2 特征的距离
加速:快速最近邻方法(FLANN)
特征匹配之后,得到了特征点之间的对应关系
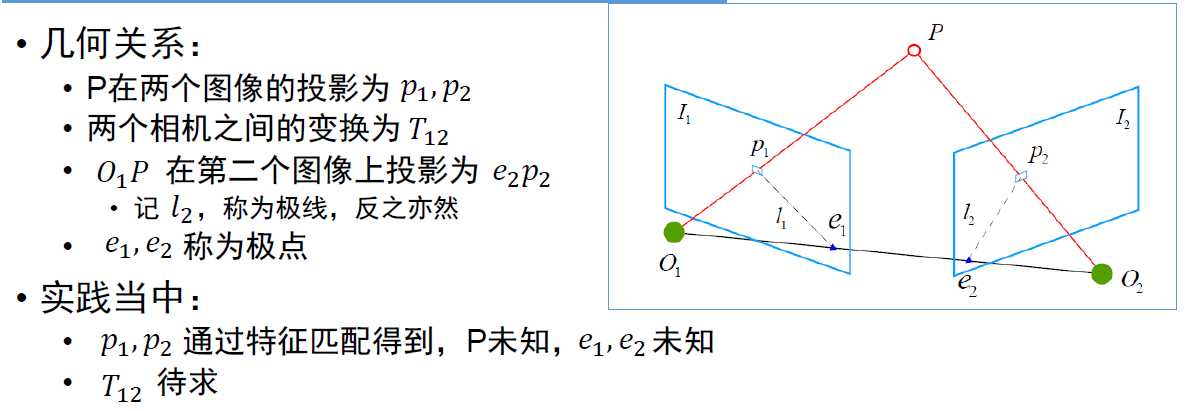
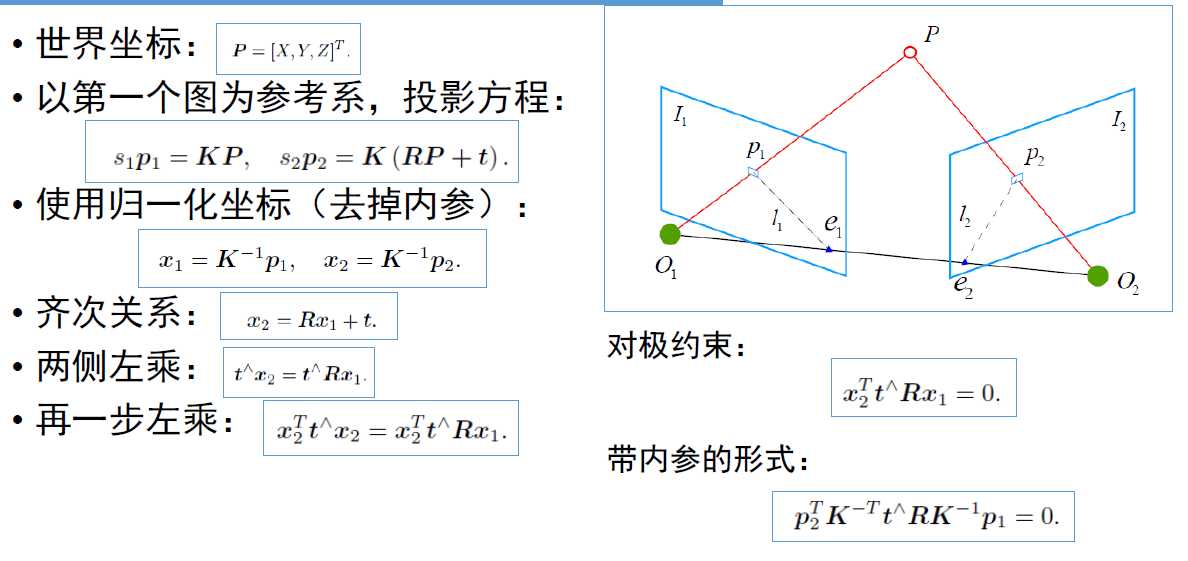
? 如果只有两个单目图像,得到 2D 2D 间的关系——对极几何
? 如果匹配的是帧和地图,得到 3D 2D 间的关系——PnP
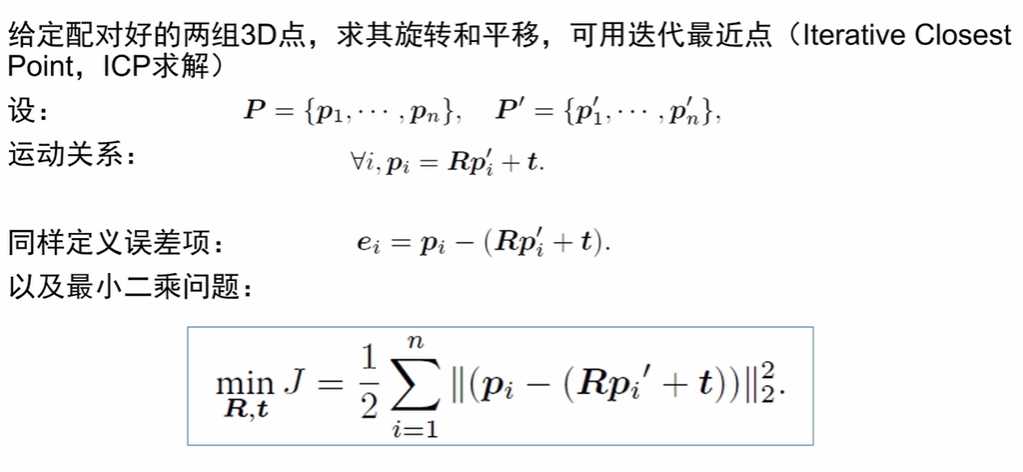
? 如果匹配的是 RGB D 图,得到 3D 3D 间的关系——ICP
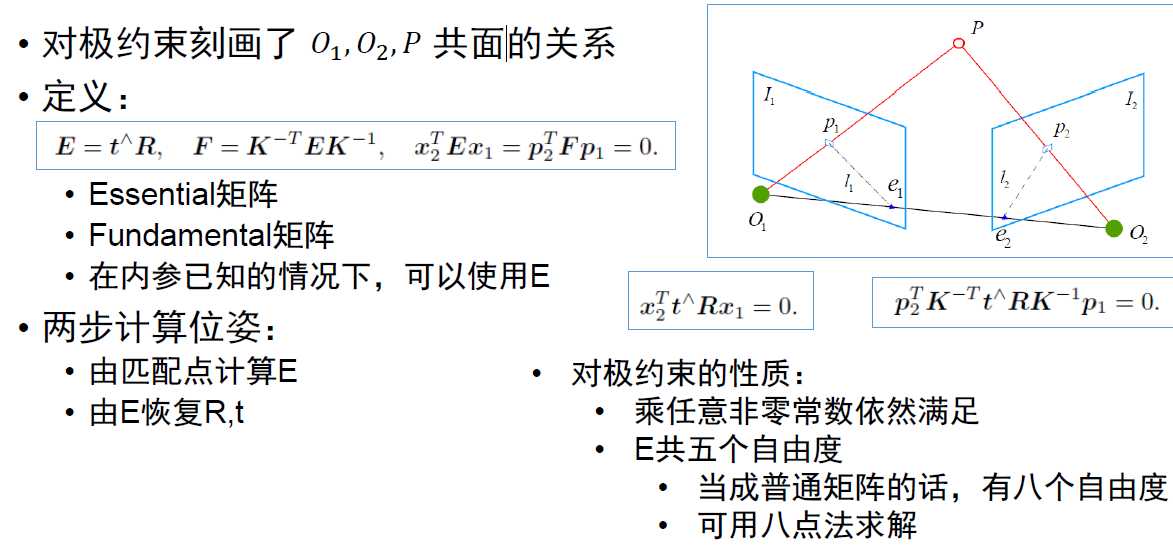
求E使用八点法来求
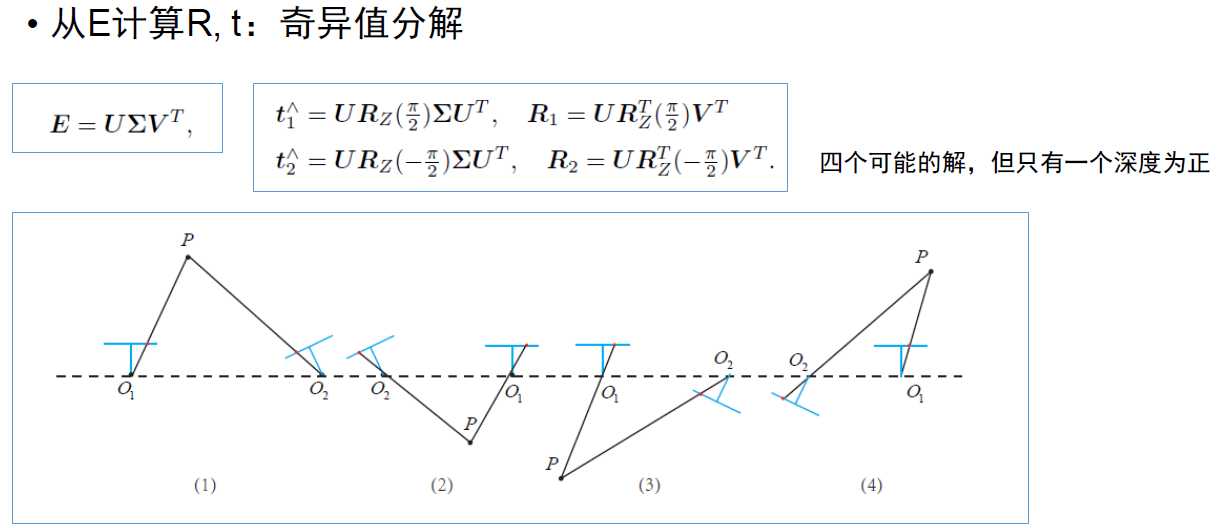
从E计算R,t则使用奇异值分解
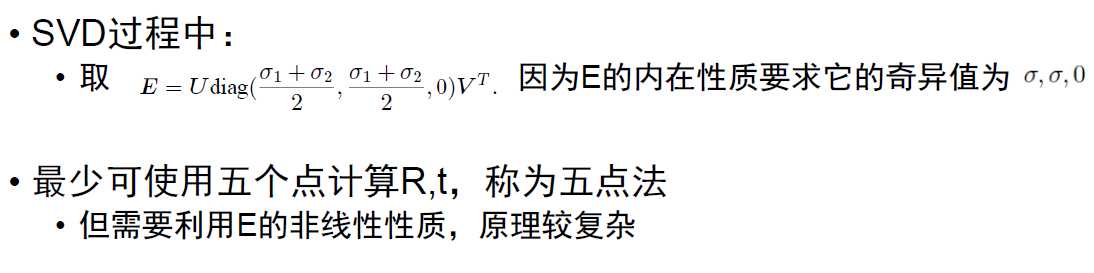
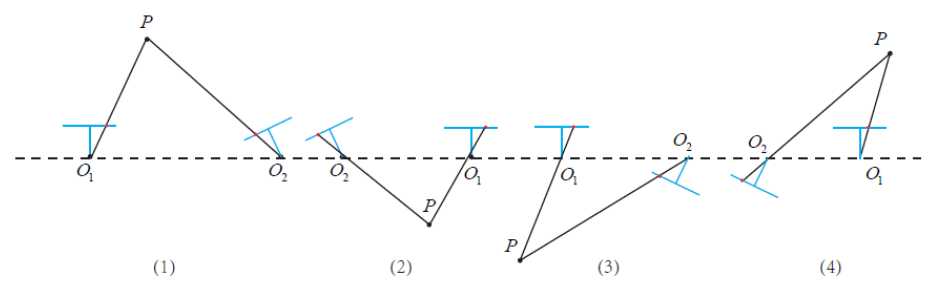
一共会生成四个可能的解,但只有一个深度为正。
SVD 过程中:取\(E = U diag (\frac{\delta_1+\delta_2}{2},\frac{\delta_1+\delta_2}{2},0)V^T\) 因为 E 的内在性质要求它的奇异值为\(\delta,\delta,0\);
? 最少可使用五个点计算 R,t ,称为五点法, 但需要利用 E 的非线性性质,原理较复杂
八点法可用于单目 SLAM 的初始化(初始化需要相机运动)
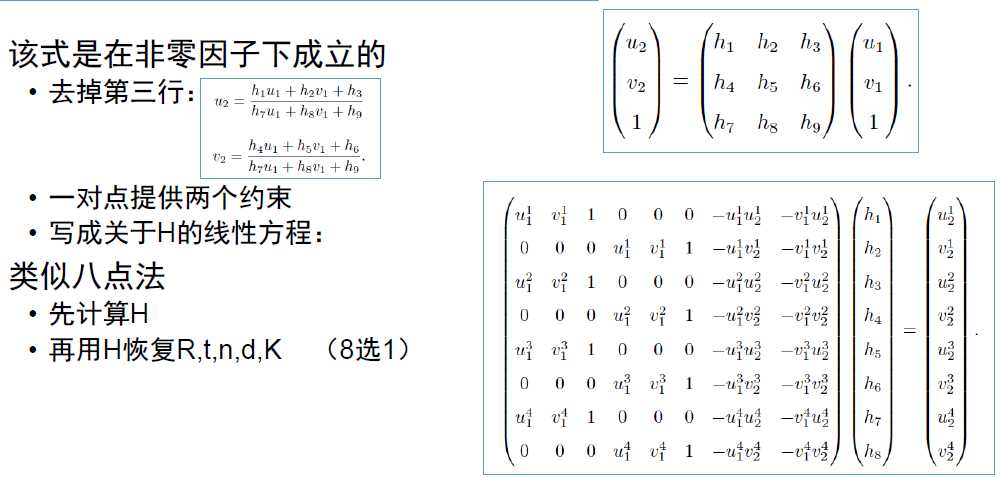
2D——2D 情况下,只知道图像坐标之间的对应关系
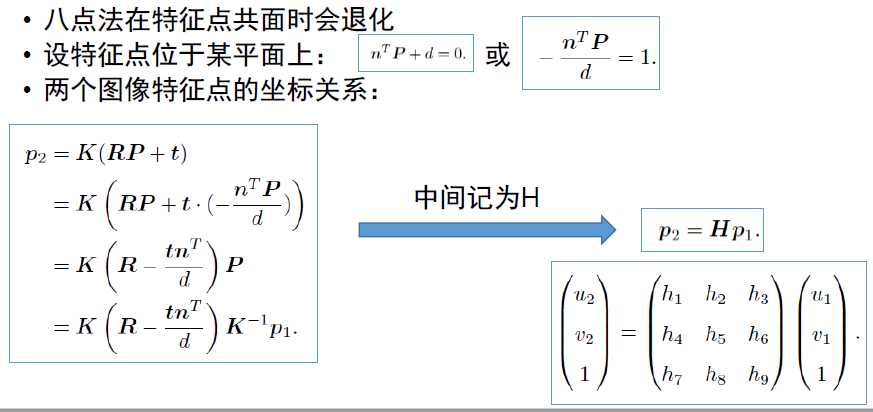
? 当特征点在平面上时(例如俯视或仰视),使用 H 恢复 R,t
? 否则,使用 E 或 F 恢复 R,t
? t 没有尺度
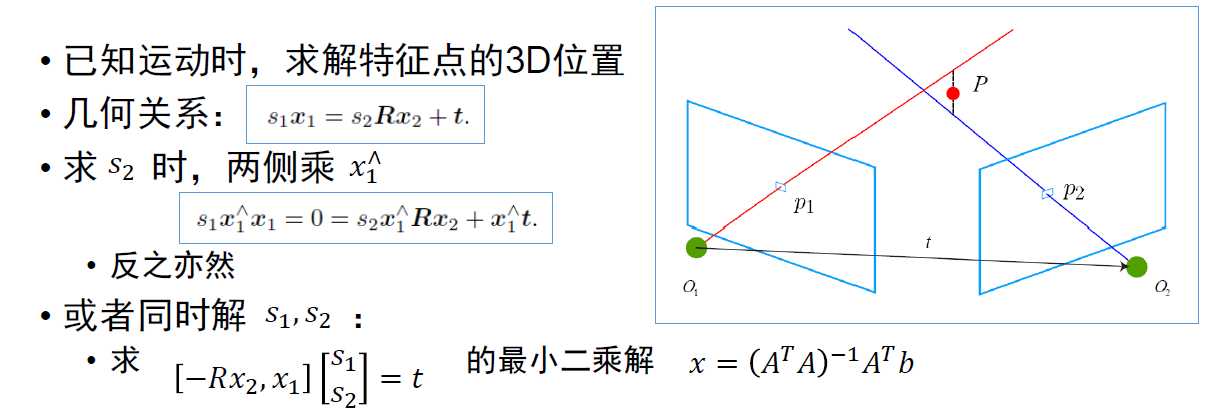
求得 R,t 后:
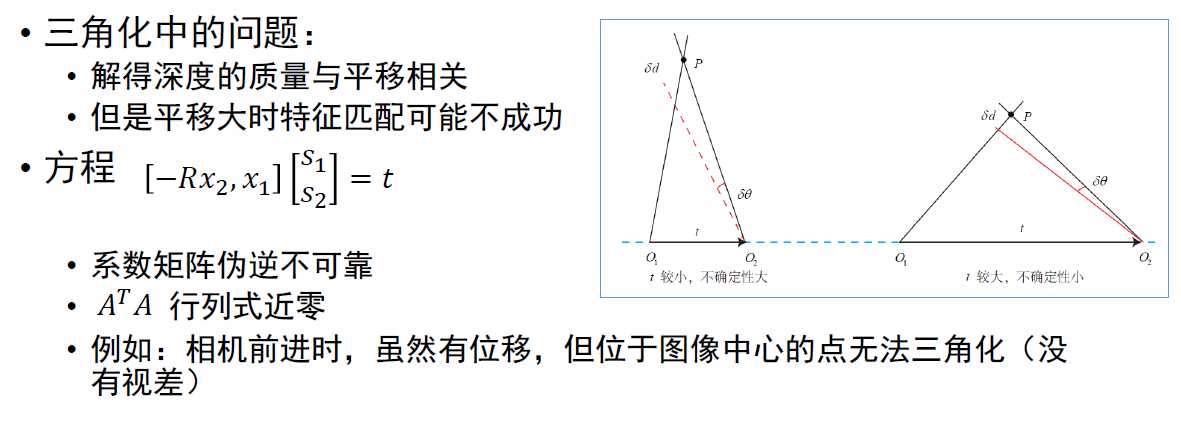
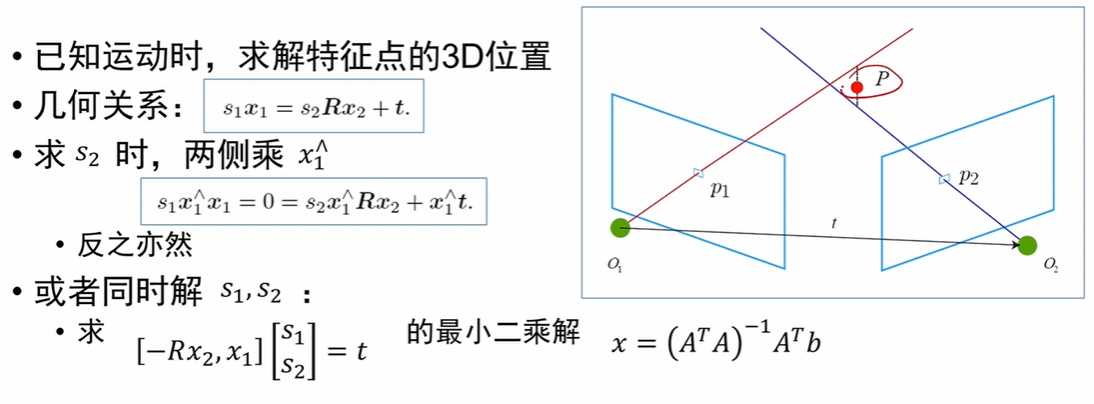
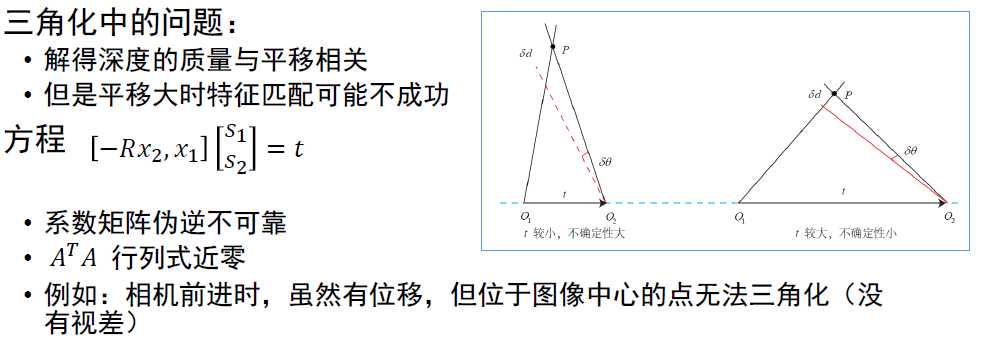
? 利用三角化计算特征点的 3D 位置(即深度)
? 实际中用于单目 SLAM 的初始化部分
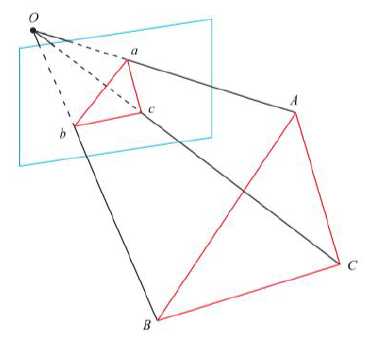
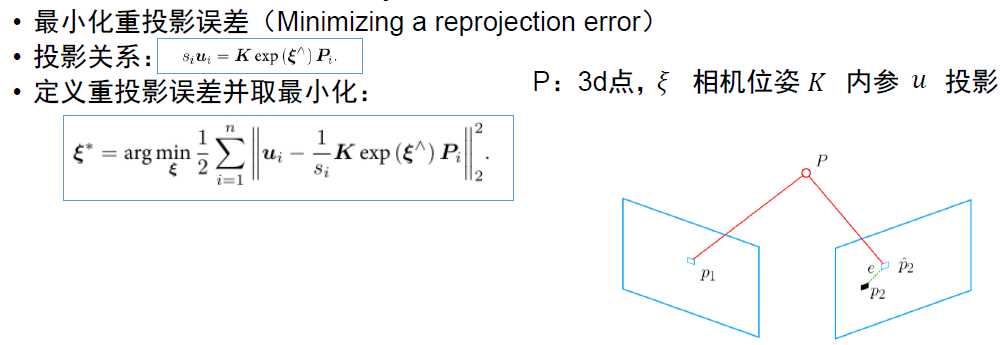
目的:已经 3D 点的空间位置和相机上的投影点,求相机的旋转和平移(外参)
解法:代数的解法/优化的解法
设空间点\(P=(X,Y,Z,1)^T\),投影点为:\(x=(u,v,1)\) 归一化坐标,则投影关系:\(sx=[R|t]p\)
展开:
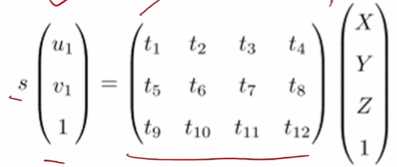
? 将它看成一个关于 t 的线性方程,求解 t
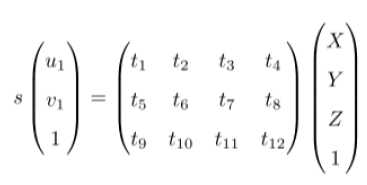
? 注意最下一行为\(s=[t_9,t_{10},t_{11},t_{12}][X,Y,Z,1]^T\)
? 用它消掉前两行中的 s ,则一个特征点提供两个方程:
为求解 12 个未知数,Y一般需要 12/2=6 对点。(超定时求最小二乘解)
? DLT 将 R,t 看成独立的未知量,所以在求出结果后,需要将 t 组成的矩阵投影回 SO(3) 3)(通常用 QR 分解实现)
? 此外,也可代入内参矩阵 K ,但 SLAM 中一般假设 K 已知,所以这里没有代入。
为求解 12 个未知数,需要 12/2=6 对点。(超定时求最小二乘解)
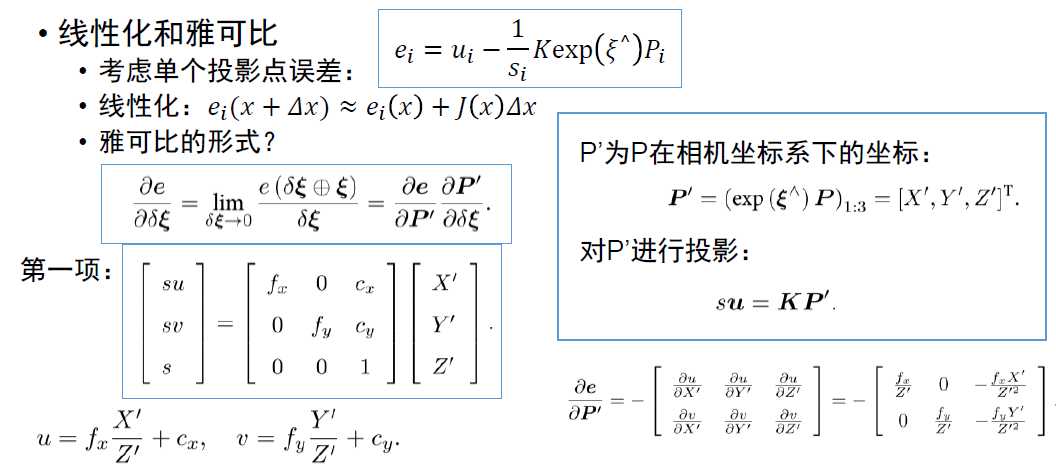
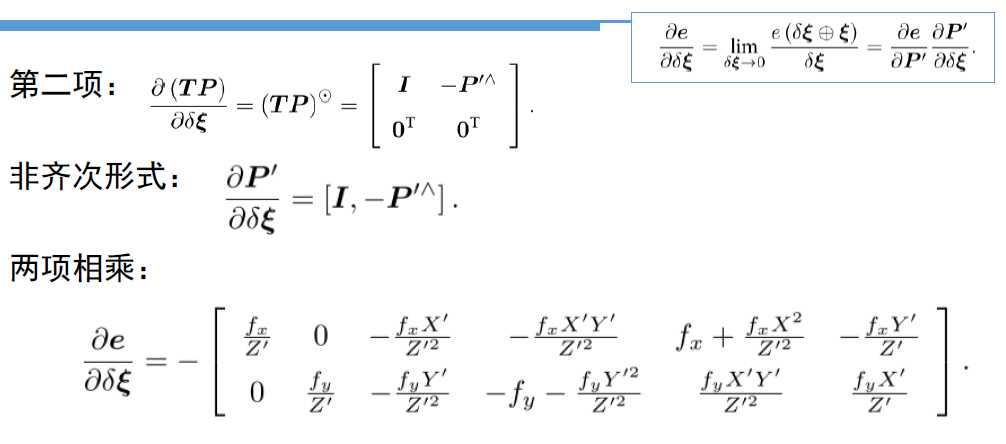
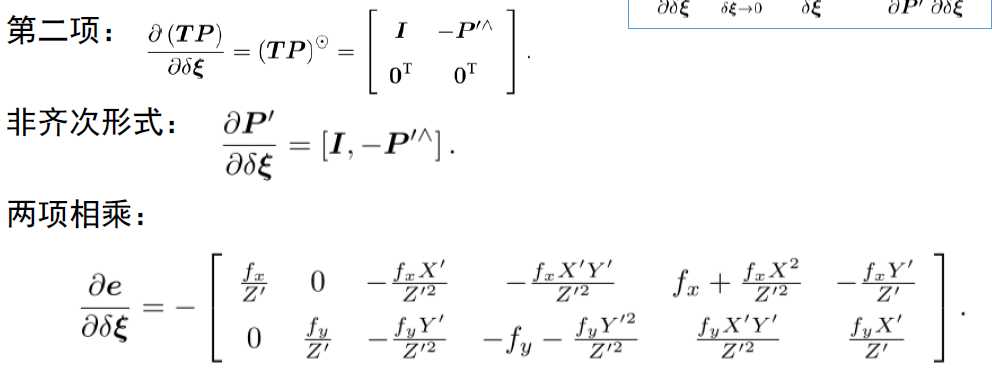
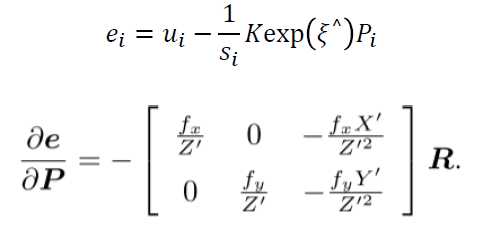
对3D点求导:
ICP 也可以从非线性优化角度求解,但:
? 已知匹配时, ICP 问题存在唯一解或无穷多解的情况。在唯一解的情况下,只要能找到极小值解,那么这个 极小值就是全局最优值 。
? 所以正常情况下, SVD 结果和优化一样,且优化很快收敛。
注:
? 在激光情况下,匹配点未知,将指定最近点为匹配点。此时问题非凸,极小值不一定为最小值。
? 利用非线性优化可以将 ICP 与 PnP 结合在一起求解。
本章介绍了与特征点相关的视觉里程计部分算法,包括:
标签:slam rip 情况下 方向 视觉 inline 良好的 s2d 注意
原文地址:https://www.cnblogs.com/guoben/p/13093161.html