标签:引入 lin 添加 mda type mamicode 相机 logs 空间
实际上,g2o能帮你做好第3-6步,你要做的只是前两步而已。
2.顶点和边
| 两个顶点 | 一条边边 | |
| 机器人两个Pose之间的变换 | 两个pose |
变换关系: detaT = T1 * inv(T2) |
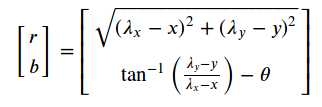
| 机器人在某个Pose处用激光测量到了某个空间点 |
一个2D Pose[x,y,theta]; 一个空间点(lamda_x,lamda_y) |
观测方程:
|
| 机器人在某个Pose处用相机观测到了某个空间点,得到了它的像素坐标 |
一个像素坐标 Pose = [u; v] 一个空间点x = (x,y,z) |
z = [u; v] = C (R * x + t), C为相机内参 |
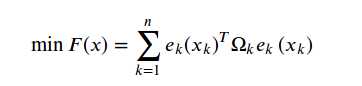
e(x,k) 是x符合z的程度的一个度量,越小越符合,反之越不符合。对式进行求导和一阶泰勒展开,得到其极值为0的方程:
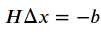
其中,deta X即为梯度。
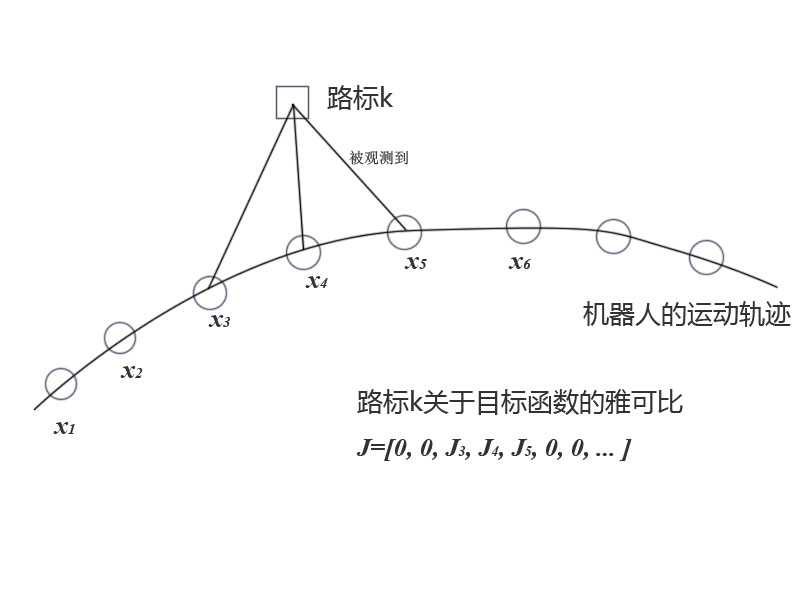
只有和xk顶点相连的边,出现了非零值。相应的二阶导矩阵H中,大部分也是零元素。这种稀疏性能很好地帮助我们快速求解上面的线性方程。稀疏矩阵代数库:SBA、PCG、CSparse、Cholmod等等
参考:https://www.cnblogs.com/gaoxiang12/p/5304272.html
总结:
重要参考:https://www.cnblogs.com/gaoxiang12/p/5244828.html
https://www.aiimooc.com/mall/preshow-htm-itemid-382.html
标签:引入 lin 添加 mda type mamicode 相机 logs 空间
原文地址:https://www.cnblogs.com/yrm1160029237/p/13189436.html