标签:tar mamicode ase diff 大小 break 代码 这一 model
| 含义 | |
|---|---|
| S | state 状态(observe) |
| A | action 动作 |
| R | reward 奖励 |
| P | probability 状态转移概率 |
| MDP | Markov Decision Processes 马尔科夫决策过程(强化学习的基本框架) |
| TD | Temporal Difference 时序差分(TD单步更新) |
| on-policy | |
| off-policy |
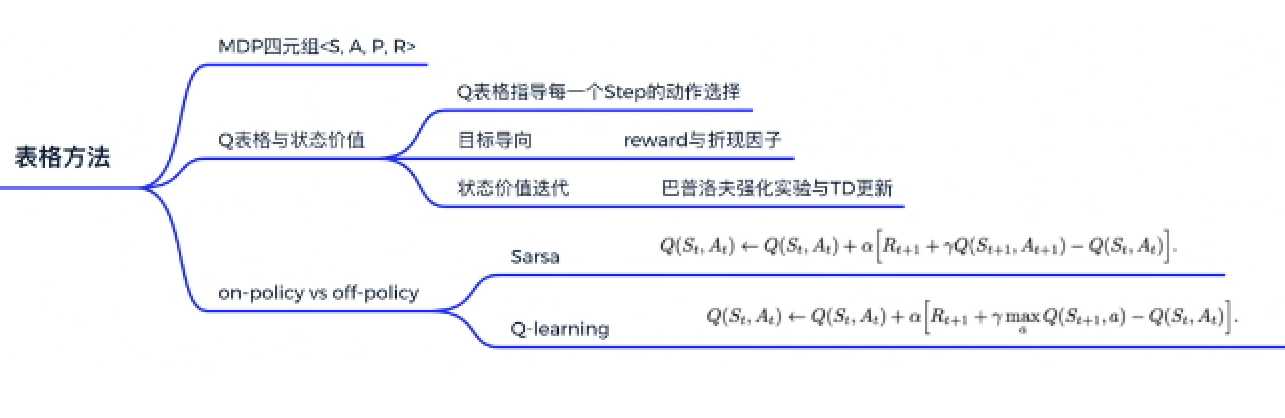
强化学习MDP四元组<S,A,P,R>
\(p[s_{t+1},r_t|s_t,a_t]\):状态转移概率,下一时刻状态仅取决于这一时刻状态。\(s_t\)状态下选择\(a_t\)动作转移到\(s_{t+1}\)并拿到\(r_t\)的概率,该过程成为MDP。
描述环境的方法
model-base :P函数与R函数已知
model-free :P函数与R函数未知;试错探索
Q表格:状态动作价值(一本生活手册),某一状态下不同动作对应的收益大小。
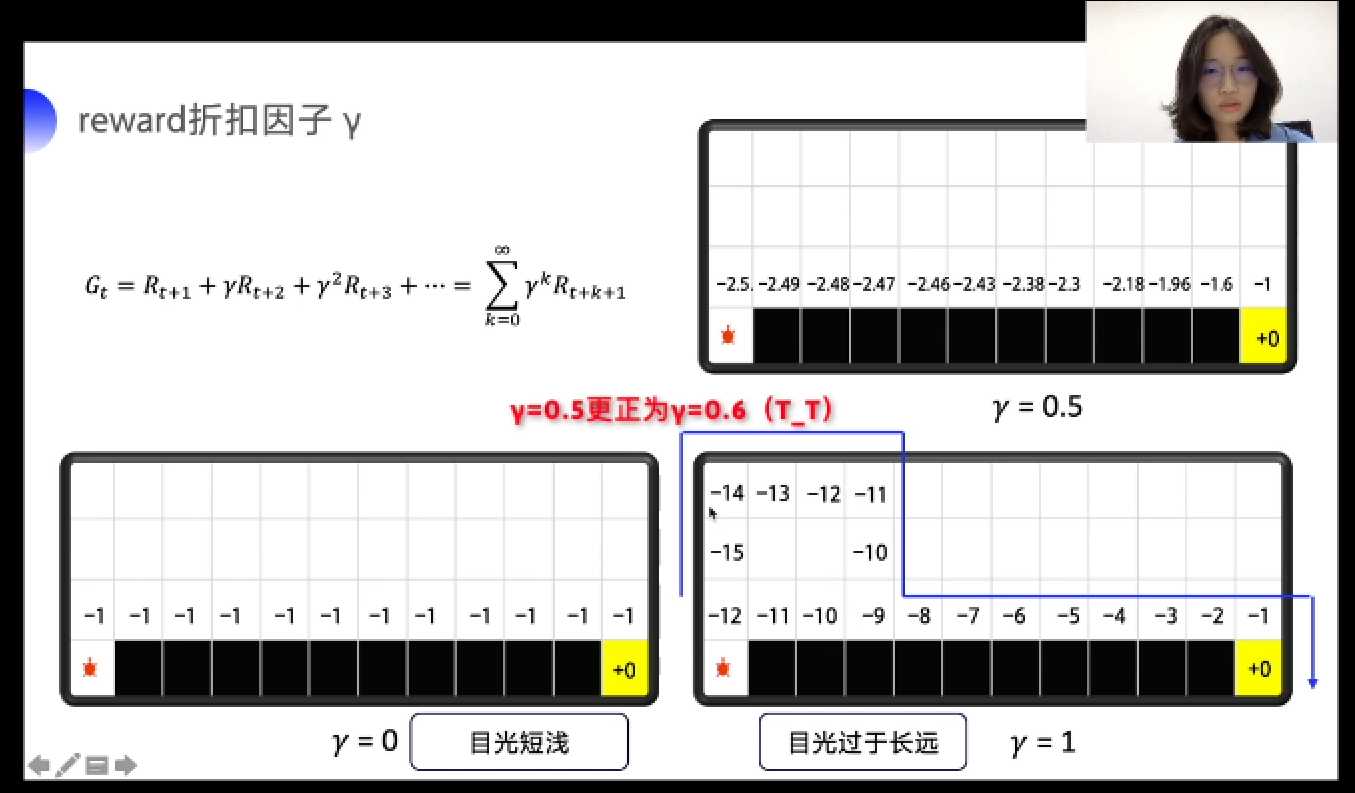
reward衰减因子\(\gamma\):未来总收益\(G_t = R_{t+1}+\gamma R_{t+2}+ {\gamma}^2 R_{t+3}+...=\sum_{k=0}^{\infty}\gamma ^k R_{t+k+1}\)
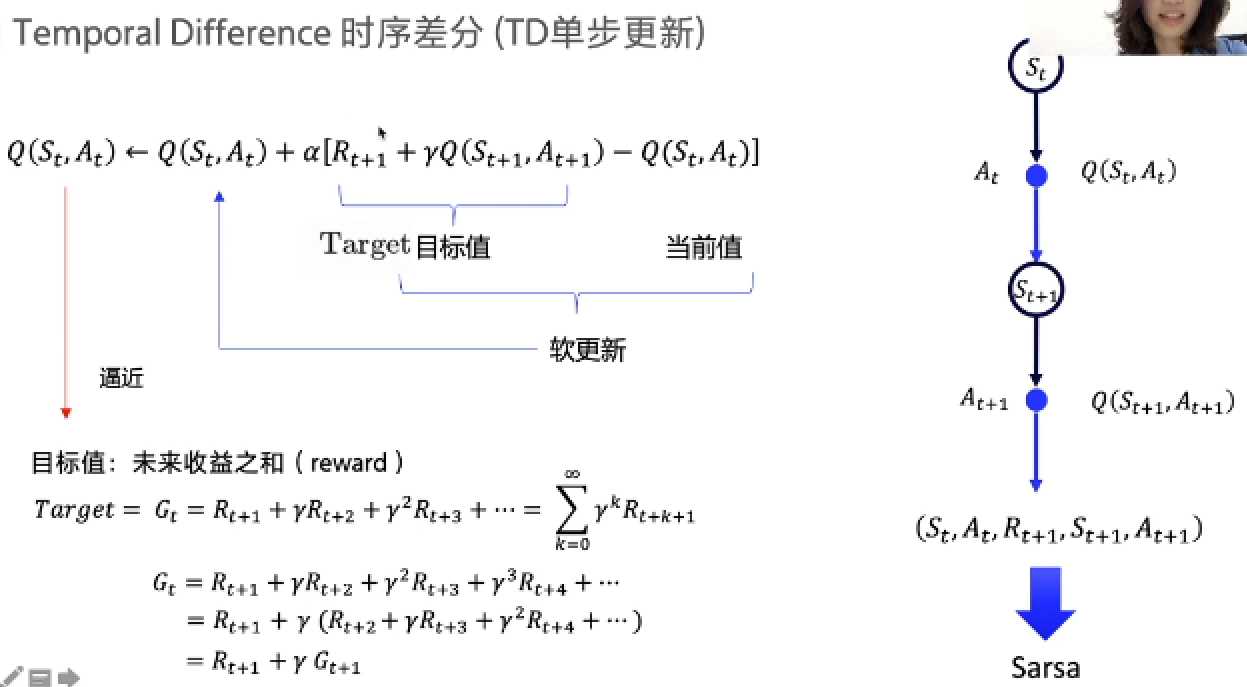
强化概念:物理意义-巴普洛夫的条件反射实验:反复将条件刺激与无条件刺激在时间上紧密结合,最终条件刺激也能引起无条件反应,形成条件刺激。即,在不断地强化后,上一个状态的价值会影响下一个状态的价值。
上述强化过程称为TD单步更新:\(Q(S_t,A_t) \rightarrow Q(S,A)+\alpha[R_{t+1}+\gamma Q(S_{t+1},A_{t+1})-Q(S,A)]\),\(Q(S_t,A_t)\)不断地逼近其真实性的未来收益之和。
\(\epsilon - greedy\):一种选择动作的策略,在已知Q表格的情况下,在一定概率下( \(\epsilon\) )下会忽略已有经验随机选取动作,剩余概率下选取收益最高的动作。是一种“利用与探索”相结合的策略。
| 操作 | ||
|---|---|---|
| 探索 | 随机选取动作 | \(\epsilon\) |
| 利用 | 选取收益最高动作 | 1-\(\epsilon\) |
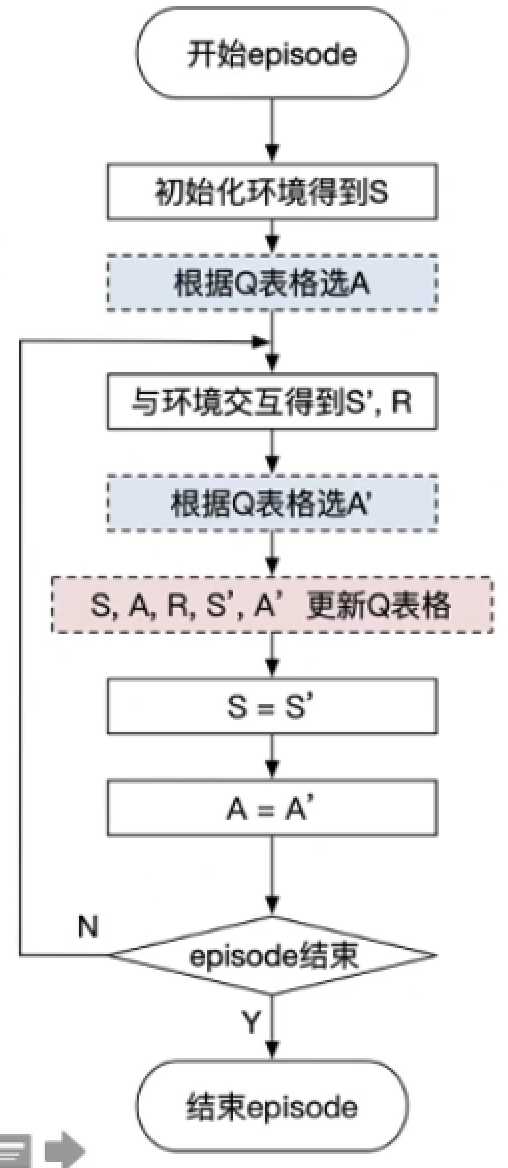
sarsa算法由TD单步更新引入,由于更新Q表格需要t时刻的状态s,对应的动作a,动作奖励r及下一时刻的状态与对应动作a,因此得名sarsa。
算法原理:\(Q(S_t,A_t) \rightarrow Q(S,A)+\alpha[R+\gamma Q(S^{‘},A^{‘})-Q(S,A)]\),其中\(S^{‘}\)为下一状态,\(A^{‘}\)为下一动作。
算法流程图如下:
#----- train.py -----#
def run_episode(env, agent, render=False):
total_steps = 0 # 记录每个episode走了多少step
total_reward = 0
obs = env.reset() # 重置环境, 重新开一局(即开始新的一个episode)
action = agent.sample(obs) # 根据算法选择一个动作
while True:
next_obs, reward, done, _ = env.step(action) # 与环境进行一个交互
next_action = agent.sample(next_obs) # 根据算法选择一个动作
# 训练 Sarsa 算法
agent.learn(obs, action, reward, next_obs, next_action, done)
action = next_action
obs = next_obs # 存储上一个观察值
total_reward += reward
total_steps += 1 # 计算step数
if render:
env.render() #渲染新的一帧图形
if done:
break
return total_reward, total_steps
# ----- agent.py ------ #
class SarsaAgent(object):
def __init__(self,
obs_n,
act_n,
learning_rate=0.01,
gamma=0.9,
e_greed=0.1):
self.act_n = act_n # 动作维度,有几个动作可选
self.lr = learning_rate # 学习率
self.gamma = gamma # reward的衰减率
self.epsilon = e_greed # 按一定概率随机选动作
self.Q = np.zeros((obs_n, act_n))
# 根据输入观察值,采样输出的动作值,带探索
def sample(self, obs):
if np.random.uniform(0, 1) < (1.0 - self.epsilon): #根据table的Q值选动作
action = self.predict(obs)
else:
action = np.random.choice(self.act_n) #有一定概率随机探索选取一个动作
return action
# 根据输入观察值,预测输出的动作值
def predict(self, obs):
Q_list = self.Q[obs, :]
maxQ = np.max(Q_list)
action_list = np.where(Q_list == maxQ)[0] # maxQ可能对应多个action
action = np.random.choice(action_list)
return action
# 学习方法,也就是更新Q-table的方法
def learn(self, obs, action, reward, next_obs, next_action, done):
""" on-policy
obs: 交互前的obs, s_t
action: 本次交互选择的action, a_t
reward: 本次动作获得的奖励r
next_obs: 本次交互后的obs, s_t+1
next_action: 根据当前Q表格, 针对next_obs会选择的动作, a_t+1
done: episode是否结束
"""
predict_Q = self.Q[obs, action]
if done:
target_Q = reward # 没有下一个状态了
else:
target_Q = reward + self.gamma * self.Q[next_obs,
next_action] # Sarsa
self.Q[obs, action] += self.lr * (target_Q - predict_Q) # 修正q
最终sarsa的结果如下,会远离悬崖,因为agent在行动时有一定概率会探索,因此考虑到这个因素,sarsa会远离悬崖。因为,sarsa为on-policy的策略。
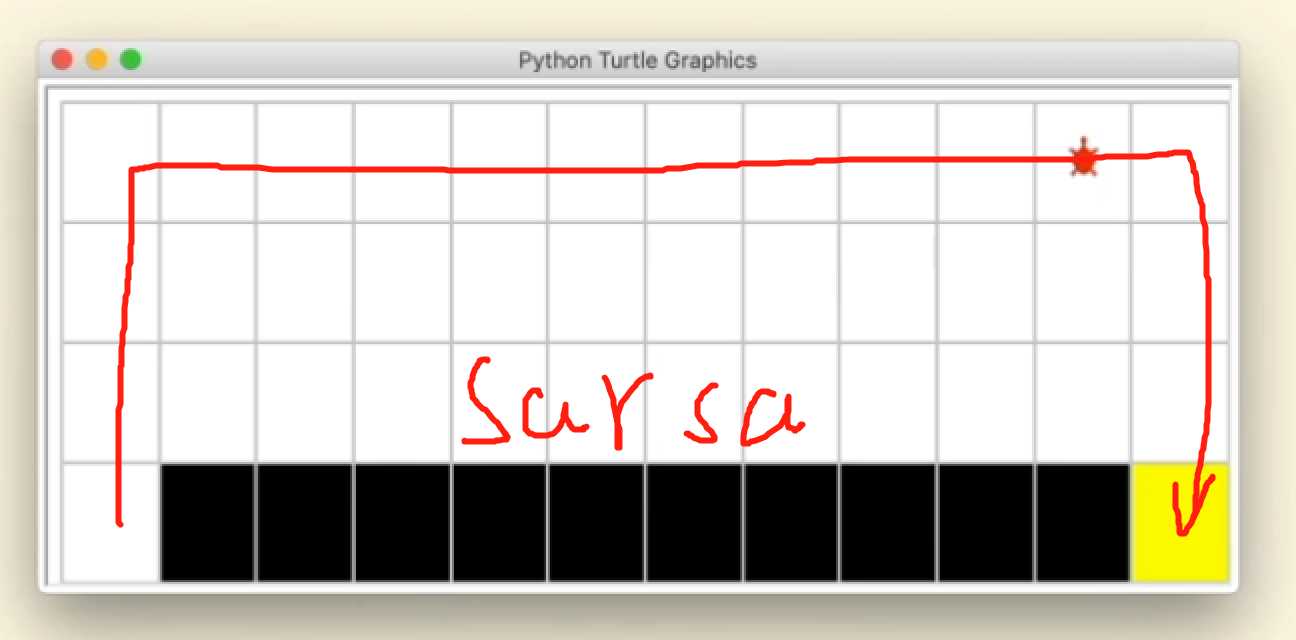
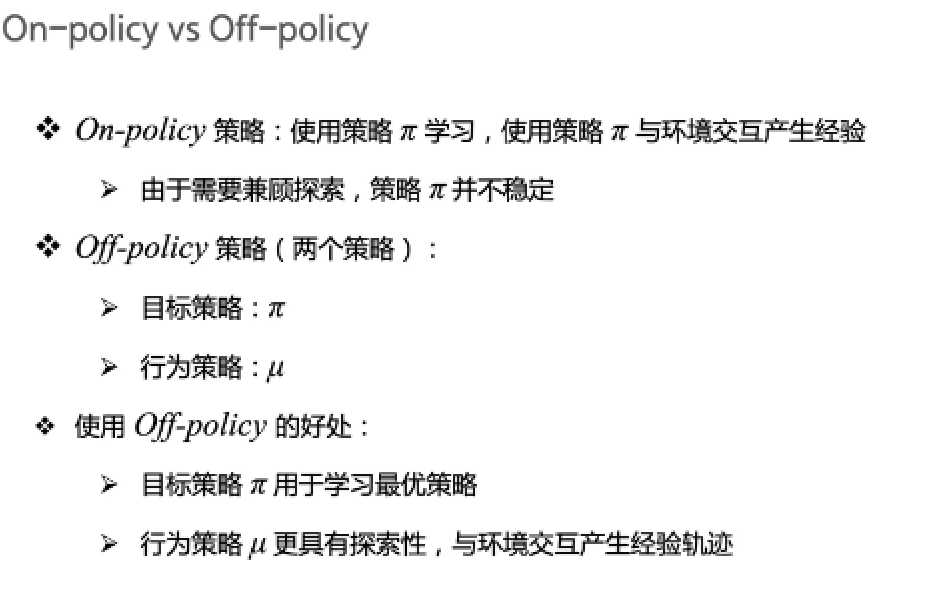
on/off-policy 是两种不同的学习策略,sarsa属于on-policy。
on-policy:用下一步“实际会执行的动作”来优化Q表格,选取动作与优化Q表格使用同一种策略。可结合上述sarsa实验结果说明,由于小乌龟选取动作使用\(\epsilon - greedy\)策略,因此sarsa知道自己处于悬崖边时有可能会坠入悬崖,因此优化时就会远离悬崖。
off-policy:选取动作时使用行为策略(behavior policy),优化目标时使用目标策略(target policy)。由于探索与利用时使用不同策略,因此off-policy可以尽情试错探索,相较于on-policy会更大胆一些。Q-learning算法就属于off-policy。
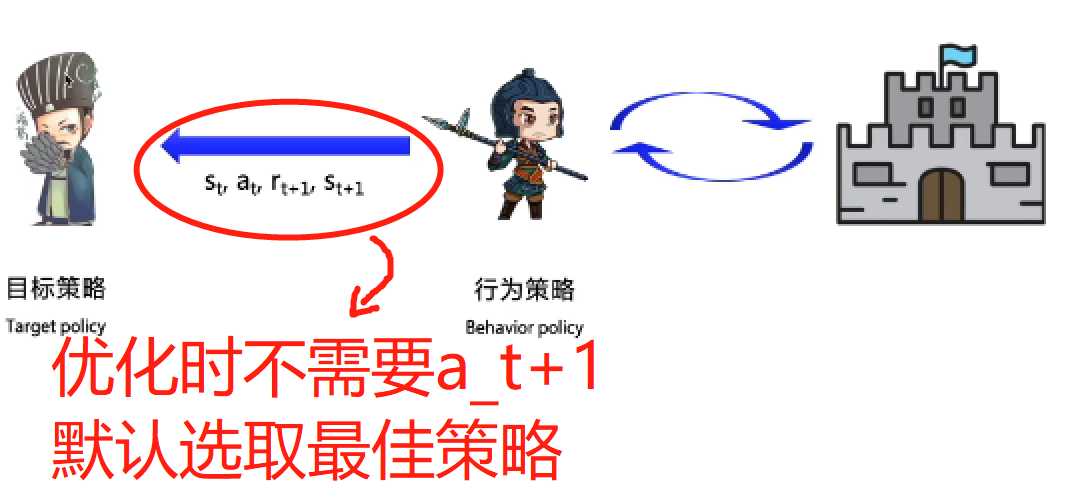
使用off-policy更容易获得最优策略
Q-learning更新表格代码如下:
# 学习方法,也就是更新Q-table的方法
def learn(self, obs, action, reward, next_obs, done):
""" off-policy
obs: 交互前的obs, s_t
action: 本次交互选择的action, a_t
reward: 本次动作获得的奖励r
next_obs: 本次交互后的obs, s_t+1
done: episode是否结束
"""
predict_Q = self.Q[obs, action]
if done:
target_Q = reward # 没有下一个状态了
else:
target_Q = reward + self.gamma * np.max(
self.Q[next_obs, :]) # Q-learning
self.Q[obs, action] += self.lr * (target_Q - predict_Q) # 修正q
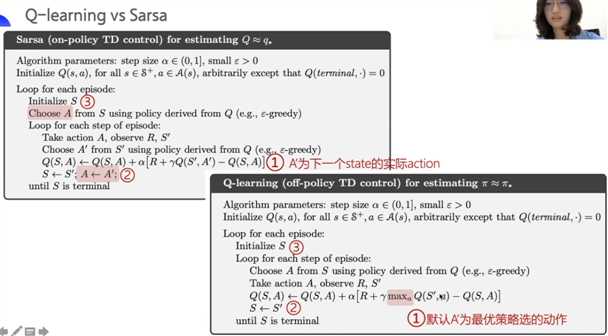
Q-learning与sarsa区别于优化中Target值得计算,sarsa用自身算法产生的动作进行优化Q表格;Q-learning不需要知道下一步动作,直接选取最佳策略来优化Q表格。
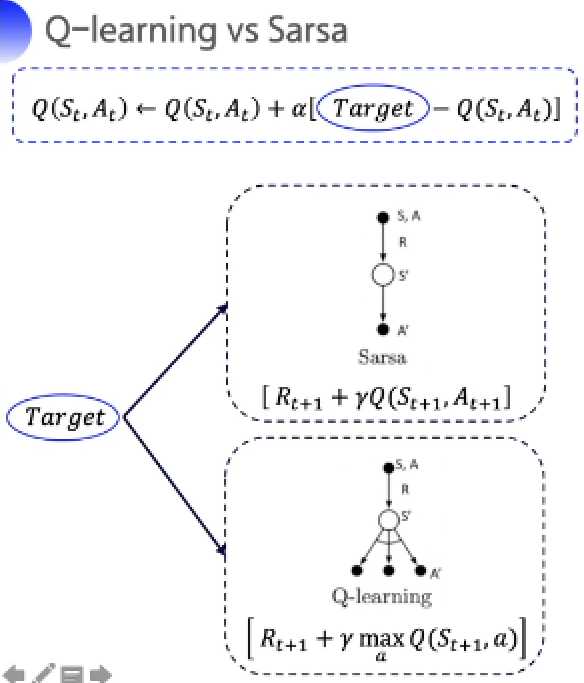
经过对比可知,Sarsa与Q-learning仅在Target处计算有所不同。Target的计算式为\(G_t=R_{t+1}+\gamma G_{t+1}\),两种算法对于\(G_{t+1}\)的计算有所不同:Q-learning使用两种策略,更新Q表格式的目标策略会逼近最佳策略。
标签:tar mamicode ase diff 大小 break 代码 这一 model
原文地址:https://www.cnblogs.com/Biiigwang/p/13196366.html