标签:通用 精度 生产 下一步 标识 cape 传输 数据包 开发
基于视觉引导方式的 AGV 小车分为自由路径方式与固定路径方式,其基本工作原理为:通过视觉处理技术在 AGV 的行驶路径上识别车辆周围环境图像或者识别粘贴色带作为的引导条,在关键节点粘贴二维码作为绝对位置标识,行驶过程中不断采集图像信息,并通过对图像信息的处理来识别 AGV 的当前位置,对下一步的行驶做出规划。视觉导引AGV相比电磁或光学等非接触自动导引方式,具有很高的识别精度,且路径设置简单、便于维护与改线、不受电磁场干扰、可以方便地识别多工位和路径分支、环境适应性更佳等诸多优点,特别适合于物流自动化和即时柔性生产组织管理。
AGV车载控制系统
AGV车载控制系统主要包括AGV通用控制器、 嵌入式 ARM一体机、无线网络模块、视觉处理系统等,相互之间通过总线相连接。 控制系统可外接电机及编码器、超声激光感器、摄像机、磁传感器、RFID等外部设备。
摄像机采集路径图像信息可能存在 因地面反光、摄像机抖动和标线污染等现象 导致图像源不稳定,所以 需经过灰度处理、平滑处理、边缘检测 等处理得到干净的路径信息。图像处理与运算会对CPU的运算能力有很高的要求。

OK1046A-C
LS1043A与 LS1046A有广泛的计算性能,CPU主频1.8GHz,CoreMark跑分达到45000。 具有高能效A53或强大A72ARM的4核心SoC,采用引脚兼容封装; 飞凌嵌入式基于LayerscapeLS1043A和 LS1046A系列提供了如下解决方案。
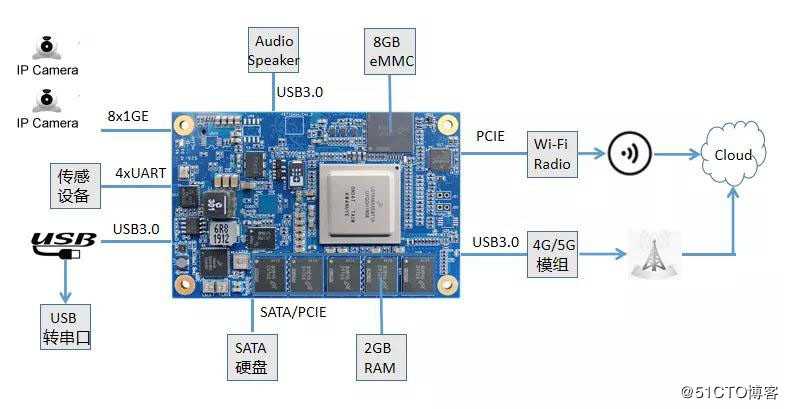
FET1046A-C工业级 核心板
利用LS1043A或LS1046A处理器中的数据包加速器(DPAA),可将cpu利用率降至5%以下;
高速外设PCIE3.0、USB3.0、SATA3.0可与 5G模组、5GWi-Fi接口配对,承载高带宽、大容量数据连接,完成实时图像的传输;
CPU的运算能力将直接影响图像在灰度、平滑、边缘检测等方面的处理速度,影响AGV导航的实时位置信息,LS1046A提供超高运算能力的性能,CoreMARK跑分45000;
5G频段的Wi-Fi模组除了拥有高速下载的能力还可以避免同类2.4GWi-Fi信道干扰的问题;LS1046A提供多种双频Wi-Fi模组的支持,可在不同环境应用;
-40℃~+75℃的工业级温宽,可有效避免设备在密闭空间因温度问题带来的不稳定因素;
点击此处进入 飞凌嵌入式官网>> ,了解关于FET1046A-C工业级核心板的更多信息。
标签:通用 精度 生产 下一步 标识 cape 传输 数据包 开发
原文地址:https://blog.51cto.com/12285566/2509181