标签:stat 根据 隐藏 概念 重要 ima span AMM ati
作者|Nathan Lambert
编译|VK
来源|Towards Data Science
研究价值迭代和策略迭代。
本文着重于对基本的MDP进行理解(在此进行简要回顾),将其应用于基本的强化学习方法。我将重点介绍的方法是"价值迭代"和"策略迭代"。这两种方法是Q值迭代的基础,它直接导致Q-Learning。

你可以阅读我之前的一些文章(有意独立):
Q-Learning开启了我们所处的深度强化学习的浪潮,是强化学习学生学习策略的重要一环。
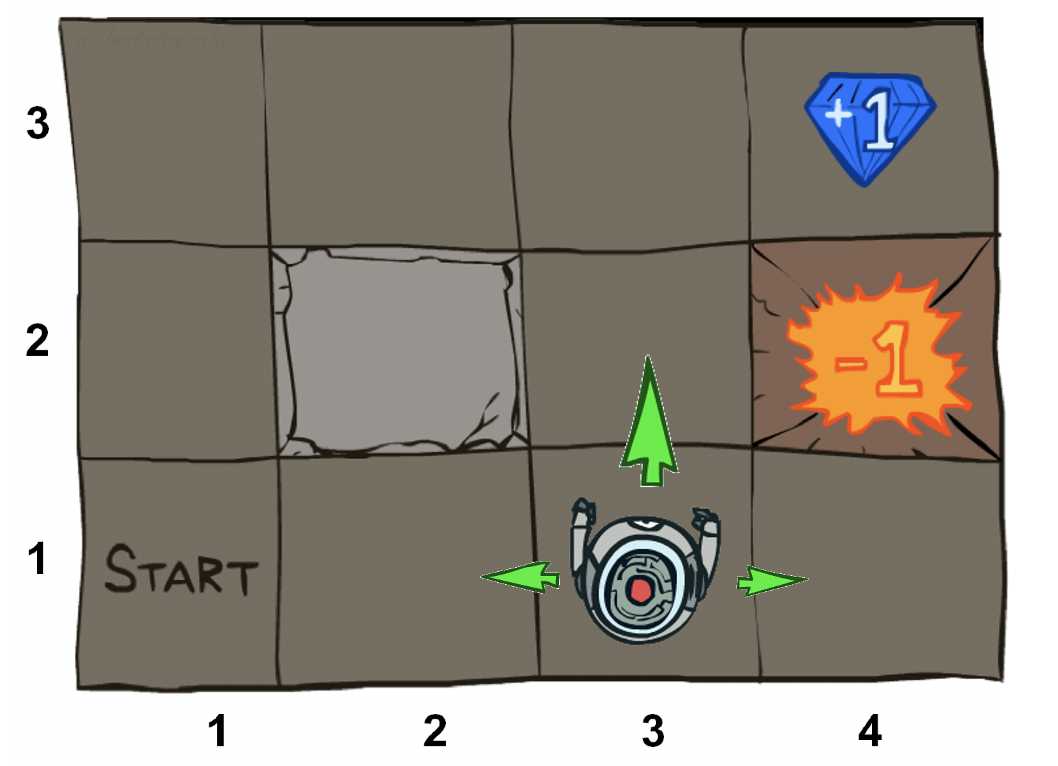
马尔可夫决策过程(MDPs)是支持强化学习(RL)的随机模型。如果你熟悉,你可以跳过这一部分,不过我增加了一些相关的解释。
状态集\(s\in S,动作集\)a\in A$。状态和动作是代理程序所有可能的位置和动作的集合。在高级强化学习中,状态和动作是连续,所以这需要重新考虑我们的算法。
转换函数T(s,a,s‘)。给定当前位置和给定动作,T决定下一个状态出现的频率。在强化学习中,我们不访问这个函数,因此这些方法试图对采样数据进行近似或隐式学习。
奖励函数R(s,a,s‘)。此函数说明每个步骤可获得多少奖励。在强化学习中,我们不使用此函数,因此我们从采样值r中学习,采样值r使算法探索环境,然后利用最优轨迹。
折扣因子γ(伽马,范围[0,1])可将下一步的值调整为将来的奖励。在强化学习中,我们不使用此函数,γ(gamma)控制了大部分学习算法和Bellman系优化的收敛性。
初始状态s0,也可能是结束状态。
MDP有两个重要的特征,状态值和机会节点(chance node)的q值。任何MDP或RL值中的*表示最佳数量。
状态值:状态的值就是从状态开始后奖励的最优递归和。
状态的Q值,动作对:Q值是与状态-动作对相关联的折扣奖励的最优和。
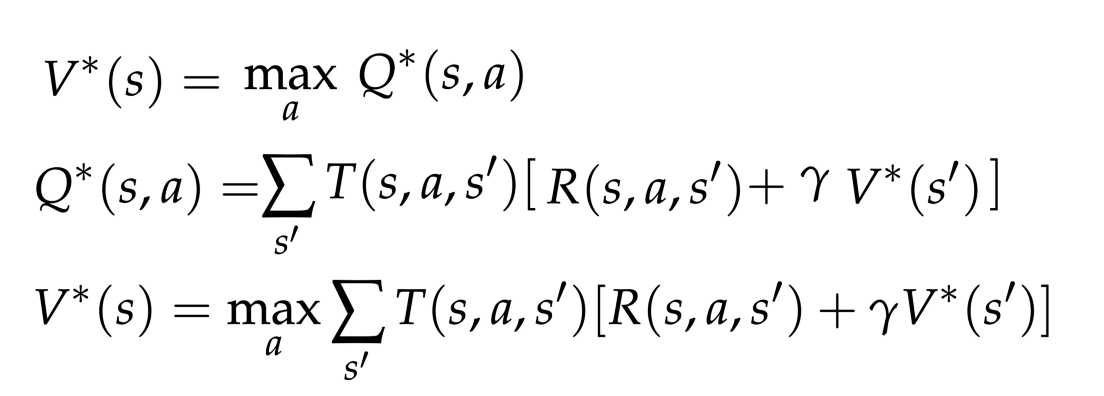
最佳值与最佳动作条件q值相关。然后,值和q值更新规则非常相似(加权转换,奖励和折扣因子)。顶部:值与q值的耦合;中部:Q值递归:,底部:值的迭代。参考:https://inst.eecs.berkeley.edu/~cs188/sp20/

学习所有状态的值,然后我们可以根据梯度来操作。值迭代直接从Bellman更新中学习状态的值。在某些非限制性条件下,Bellman更新被保证收敛到最优值。

学习一项策略可能比学习一种价值观更直接。学习一个值可能需要无限长的时间来收敛到一个64位浮点数的数值精度(考虑在每次迭代中一个常数的移动平均,在开始估计为0之后,它将永远添加一个越来越小的非零数)。
学习与值相关的策略。策略学习增量地查看当前值并提取策略。由于动作空间是有限的,我们希望它能比值迭代收敛得更快。从概念上讲,对操作的最后一次更改将发生在小的滚动平均更新结束之前。策略迭代有两个步骤。
第一个称为策略提取,就是如何从一个值转换到一个策略,这策略使期望值最大化。

第二步是策略评估。策略评估采用策略,并以策略为条件进行值迭代。这些样本永远与策略相关,但是我们必须运行迭代算法,以减少提取相关动作信息的步骤。

与值迭代一样,由于底层的Bellman更新,对于大多数合理的MDPs,策略迭代保证收敛。
学习最优值的问题是很难从中提取出策略。argmax算子明显是非线性的,很难进行优化,因此q值迭代法向直接策略提取迈出了一步。每个状态下的最优策略就是那个状态下的最大q值。

大多数指令以"值迭代"开头的原因是,它自然地进入了Bellman更新中。Q值迭代需要一起替换两个关键MDP值关系。这样做之后,这是我们将要了解的Q-Learning的第一步。
大多数指令以值迭代开始的原因是,它可以更自然地插入Bellman更新。Q值迭代需要一起替换两个关键的MDP值关系。这样做之后,它就离我们将要了解的Q-learning一步之遥了。
让我们确保你理解了所有的术语。本质上,每个更新由求和后的两个项组成(也可能是由max来进行的选择动作)。让我们用括号括起来然后讨论它们与MDP的关系。
第一项是T(s,a,s‘)R(s,a,s‘)乘积的总和。这一项表示潜在的值和给定状态和转换的可能性。T,或者说转换,决定了从转换中获得给定回报的可能性(回想一下,一个元组s,a,s ‘决定了其中一个动作a将一个代理从一个状态s带到另一个状态s‘)。这将做一些事情,这会做一些事情,例如权衡具有高奖励的低概率状态与权重较低的频繁状态。
下一项决定了这些算法的“bellman特性”。它是迭代算法V的最后一步的数据加权,上面的公式有一项。这从邻近状态获取关于值的信息,这样我们就可以理解长期的转变。将这一项看作递归更新的主要发生位置,而第一项则是由环境决定的优先权重。
告知所有迭代算法"在某些条件下收敛到最佳值或策略"。这些条件是:
状态空间总覆盖率。条件是所有状态、动作、next_state元组都是在条件策略下到达的。如果不这样做,来自MDP的一些信息将会丢失,并且值可能会停留在初始值上。
折扣因子γ < 1。否则造成无限循环,并且最后趋于无穷大。
值得庆幸的是,在实践中,这些条件很容易满足。大多数探索都具有epsilon贪婪性,包括总有随机动作的机会(因此任何动作都是可行的),并且non-one折现因子会导致更佳的性能。最终,这些算法可以在很多设置下工作,因此绝对值得一试。
我们如何将我们所看到的变成强化学习问题?我们需要使用样本,而不是真正的T(s,a,s‘)和R(s,a,s‘)函数。
MDPs中的迭代方法与解决强化学习问题的基本方法之间的惟一区别是,RL样本来自MDP的底层转换和奖励函数,而不是将其包含在更新规则中。有两件事我们需要更新,替换T(s,a,s ‘)和替换R(s,a,s ‘)
首先,让我们将转换函数近似为每个观察元组的平均动作条件转换。我们没有看到的所有值都是用随机值初始化的。这是基于模型的强化学习最简单的形式(我的研究领域)。
现在,剩下的就是记住如何使用奖励。但是,我们实际上每一步都有一个奖励,所以我们可以不受惩罚(方法用许多样本平均出正确的值)。考虑用采样奖励近似q值迭代方程,如下所示。

上面的等式是Q-Learning。我们从一些填充有随机值的向量Q(s,a)开始,然后收集与世界的交互并调整alpha。Alpha是一种学习率,因此当我们认为算法正在收敛时,我们将降低它。
结果表明,Q-learning与Q-value迭代非常相似,但我们只是在一个不完整的世界观下运行这个算法。
机器人和游戏中使用的Q-learning是在更复杂的特征空间中,神经网络近似于一个包含所有状态-动作对的大表格。
原文链接:https://towardsdatascience.com/fundamental-iterative-methods-of-reinforcement-learning-df8ff078652a
欢迎关注磐创AI博客站:
http://panchuang.net/
sklearn机器学习中文官方文档:
http://sklearn123.com/
欢迎关注磐创博客资源汇总站:
http://docs.panchuang.net/
标签:stat 根据 隐藏 概念 重要 ima span AMM ati
原文地址:https://www.cnblogs.com/panchuangai/p/13340974.html