标签:转化 mic 图片 二维 形式 一个 角度 time 向量
线性方程的基本问题就是解线性方程组
例:\({ \left\{ \begin{array}{*{20}{l}} {2x-y=0}\{-x+2y=3} \end{array}\right. }\)
分析:
? 对于二元线性方程组,对应的矩阵表示是
? \({ \left[ {{\left. \begin{array}{*{20}{l}} {2\text{?}\text{?}\text{?}\text{?}-1}\{-1\text{?}\text{?}\text{?}\text{?}2} \end{array} \right] }}\right. }{ \left[ {{\left. \begin{array}{*{20}{l}} {x}\{y} \end{array} \right] }={ \left[ {{\left. \begin{array}{*{20}{l}} {0}\{3} \end{array} \right] }}\right. }}\right. }\)
? 令:
? \({\begin{array}{*{20}{l}} {A={ \left[ {{\left. \begin{array}{*{20}{l}} {2\text{?}\text{?}\text{?}\text{?}-1}\{-1\text{?}\text{?}\text{?}\text{?}2} \end{array} \right] }}\right. }}\{x={ \left[ {{\left. \begin{array}{*{20}{l}} {x}\{y} \end{array} \right] }}\right. }}\{b={ \left[ {{\left. \begin{array}{*{20}{l}} {0}\{3} \end{array} \right] }}\right. }} \end{array}}\)
则原线性方程简化为:\(Ax=b\)
矩阵\(A\)称为系数矩阵
上例中,一行一行看,每一个方程都表示二维平面上的一条直线,作图
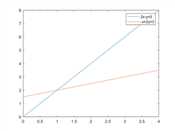
两条直线相较于点\((1,2)\),也就说从行图像上看,方程组的解是一个两条直线的交点
将原方程组转化成向量形式:
\({x{ \left[ {{\left. \begin{array}{*{20}{l}} {2}\{-1} \end{array} \right] }}\right. }+y{ \left[ {{\left. \begin{array}{*{20}{l}} {-1}\{2} \end{array} \right] }={ \left[ {{\left. \begin{array}{*{20}{l}} {0}\{3} \end{array} \right] }}\right. }}\right. }}\)
左边两个向量,通过\(x\)和\(y\)的线性组合形成了右边的向量,此时\((1,2)\)是方程组的解,作图
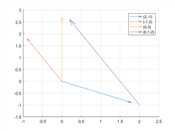
从列图像上看,方程组的解,是找出左侧向量与\(x,y\)的合适组合(即线性组合)得到右侧向量
从两元方程组延伸到三元:
行图像:在三维空间中,三个平面的交点(假设有一个解)
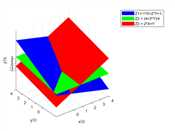
列图像:通过左侧三个向量的线性组合,得到右侧向量
综合行图像与列图像的分析,多元方程组的行图像是对矩阵\(A\)的行进行处理,而列图像是对矩阵\(A\)的列进行线性组合
在这里思考一个问题:对于一个三元方程组(线性方程表示):
\(Ax=x(列1)+y(列2)+z(列3)=b\)
由于\(x,y,z\)都是未知量,它们可能有无数种线性组合,
那么对于任意的\(b\),是否都能求出\(Ax=b\)?也就是说所有列的线性组合能否覆盖整个三维空间?
答案是否定的
比如在列图像角度分析,对于一个方阵(行数和列数相等的矩阵)\(A\),当三个列向量在同一平面上时(假设方程组有解),这三个列向量的线性组合也在这个平面上,也就是说\(b\)只能在这个平面上不会覆盖整个三维空间,这时矩阵\(A\)称为奇异矩阵,矩阵\(A\)不可逆的;如果三个列向量不共面,那么它们的线性组合有无数种情况,也就是说\(b\)的取值覆盖了整个三维空间,这时矩阵\(A\)称为非奇异矩阵
这是对奇异矩阵和非奇异矩阵几何理解,后面会再进行深入学习
例:
\({ \left[ {{\left. \begin{array}{*{20}{l}} {2\text{?}\text{?}5}\{1\text{?}\text{?}3} \end{array} \right] }}\right. }{ \left[ {{\left. \begin{array}{*{20}{l}} {1}\{2} \end{array} \right] }}\right. }\)
法一:(线性运算)
原式\({=1{ \left[ {{\left. \begin{array}{*{20}{l}} {2}\{1} \end{array} \right] }}\right. }+2{ \left[ {{\left. \begin{array}{*{20}{l}} {5}\{3} \end{array} \right] }=}\right. }{ \left[ {{\left. \begin{array}{*{20}{l}} {1 \times 2+2 \times 5}\{1 \times 1+2 \times 3} \end{array} \right] }}\right. }={ \left[ {{\left. \begin{array}{*{20}{l}} {12}\{7} \end{array} \right] }}\right. }}\)
法二:(行运算)左侧矩阵\(A\)的每一行点乘右侧向量\(x\)
原式\({={ \left[ {{\left. \begin{array}{*{20}{l}} {1 \times 2+2 \times 5}\{1 \times 1+2 \times 3} \end{array} \right] }={ \left[ {{\left. \begin{array}{*{20}{l}} {12}\{7} \end{array} \right] }}\right. }}\right. }}\)
两种方法看似相同,但思路不同,第一种方法思路简单,对于再大点的矩阵运算时不易出错
标签:转化 mic 图片 二维 形式 一个 角度 time 向量
原文地址:https://www.cnblogs.com/LuckyZhq/p/13373772.html