标签:class 论文思想 root 简单 结果 code inf mic 深度
采用bottom-top的方式进行3D人体姿态检测,出的结果包括:3D root-relate + Absolute-depth + PAFs。
主要做的贡献如下(可能之前有人已提出):
- 3D bottom-top
- Root map + PAFs
论文思想比较简单,整体进行概括
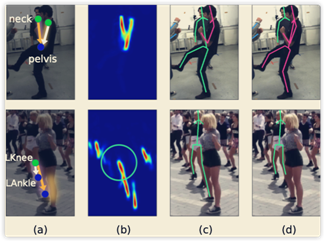
gaussian进行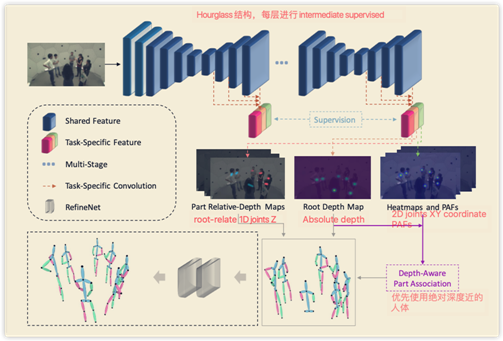
做法也很简单,直接使用absolute root map获得的每个人远近进行排序,先计算近处的人体,也就等于遮挡的后计算,避免重叠。
SMAP: Single-Shot Multi-Person Absolute 3D Pose Estimation
标签:class 论文思想 root 简单 结果 code inf mic 深度
原文地址:https://www.cnblogs.com/wjy-lulu/p/13600928.html