标签:image 改变 modules 链接 部分 提示 开始 光盘 上界
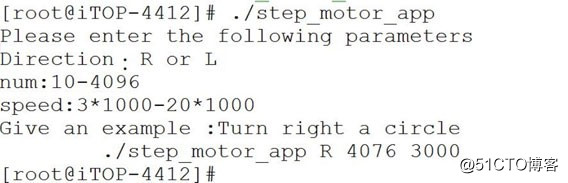
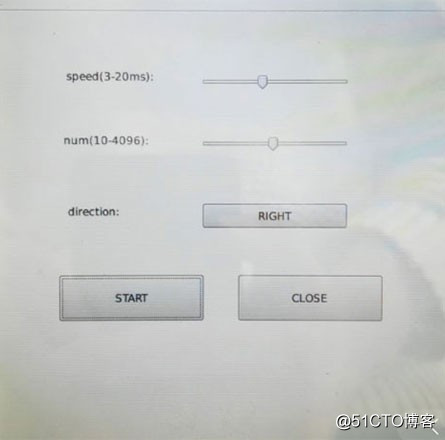
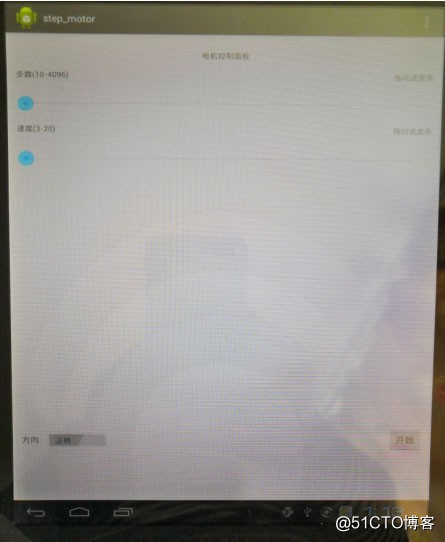
迅为4412开发板-步进电机-驱动和测试例程
原文地址:https://blog.51cto.com/13962589/2541564