标签:instance origin OLE 二分查找 还需要 速度 大于等于 机制 table
数组+单向链表+红黑树
数组:数组每一项都是一个链表,其实就是数组和链表的结合体
单向链表:当法神hash碰撞时,首先会找到数组对应位置,然后1.8采用尾插入法(1.7采用头插入法),形成一个单项链表结构
JDK1.8 红黑树:当数组中每项的链表长度大于8时,会转换为红黑树
hash碰撞:不同的key可能会产生相同的hash值;
方案:链表发,再哈希法;
hashMap中采用链表发,在ConcurrentHashMap中采用哈希法;
二叉查找树在特殊情况下也会变成线性结构,和原来链表有共同的问题,节点太深,查找性能慢;
红黑树相比二叉树,在检索的时候效率其实差不多,都是通过平衡来二分查找。但对于插入删除等操效率提高很多。红黑树不像二叉树一样追求绝对的平衡,它允许局部很少的不完全平衡,这样对于效率影响不大,但省去了很多没有必要的调平衡操作,二叉树调平衡有时候代价较大,所以二叉树的效率不如红黑树;
在平常我们用HashMap的时候,HashMap里面存储的key是具有良好的hash算法的key(比如String、Integer等包装类),冲突几率自然微乎其微,此时链表几乎不会转化为红黑树,但是当key为我们自定义的对象时,我们可能采用了不好的hash算法,使HashMap中key的冲突率极高,但是这时HashMap为了保证高速的查找效率,就引入了红黑树来优化查询了。
通过源码我们得知HashMap源码作者通过泊松分布算出,当桶中结点个数为8时,出现的几率是亿分之6的,因此常见的情况是桶中个数小于8的情况,此时链表的查询性能和红黑树相差不多,因为转化为树还需要时间和空间,所以此时没有转化成树的必要。
当数据较少的时候,采用链表要比红黑树效率高,因为平衡二叉树保持平衡需要耗费资源,那么前期数据较少时采用链表,当链表中的数据长度大于8时,就将链表转换成红黑树,可以加快数据的插叙速度,官方测试8为性能最优。
public V put(K key, V value) {
return putVal(hash(key), key, value, false, true);
}
/**
* Implements Map.put and related methods
*
* @param hash hash for key
* @param key the key
* @param value the value to put
* @param onlyIfAbsent if true, don‘t change existing value
* @param evict if false, the table is in creation mode.
* @return previous value, or null if none
*/
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
//判断当前数组是否为空,如果为空要进行第一次扩容
if ((tab = table) == null || (n = tab.length) == 0)
//扩容后将扩容大小交给N
n = (tab = resize()).length;
//判断获取当前数组位置是否存在数据,如果为空则直接插入,否则需要代表当前位置不是空的,不是空的需要判断
if ((p = tab[i = (n - 1) & hash]) == null)
//如果为空则创建一个新的节点添加到该位置
tab[i] = newNode(hash, key, value, null);
else {
Node<K,V> e; K k;
//判断Hash值和Key值是否相同,如果相同则需要Value覆盖
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
e = p;
//判断当前数组中存放的节点是否是树节点,则添加树节点即可
else if (p instanceof TreeNode)
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
else {
//循环遍历链表
for (int binCount = 0; ; ++binCount) {
//判断当前数组该位置的值得下一个元素是否为空,如果为空则追加到当前元素后边
if ((e = p.next) == null) {
p.next = newNode(hash, key, value, null);
//添加完毕后判断当前链表节点有多少个,如果节点大于等于8则转换为红黑树
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
//treeifyBin判断当前数组是否为空,或者长度是否小于64,如果为空或者小于64,则先扩容
treeifyBin(tab, hash);
break;
}
//再次进行Key的重复判断
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
break;
p = e;
}
}
//表明,记录到具有相同元素的节点
if (e != null) { // existing mapping for key
V oldValue = e.value;
if (!onlyIfAbsent || oldValue == null)
e.value = value;
//这个是空函数,可以有用户根据需要覆盖
afterNodeAccess(e);
return oldValue;
}
}
++modCount;
//判断当前数组元素的个数和阈值进行比较,如果数量大于阈值则需要扩容
if (++size > threshold)
//默认情况下,第一次添加数据的时候,先会进行一次扩容后再添加数据,后续都是先添加数据在进行扩容
resize();
//这个是空函数,可以有用户根据需要覆盖
afterNodeInsertion(evict);
return null;
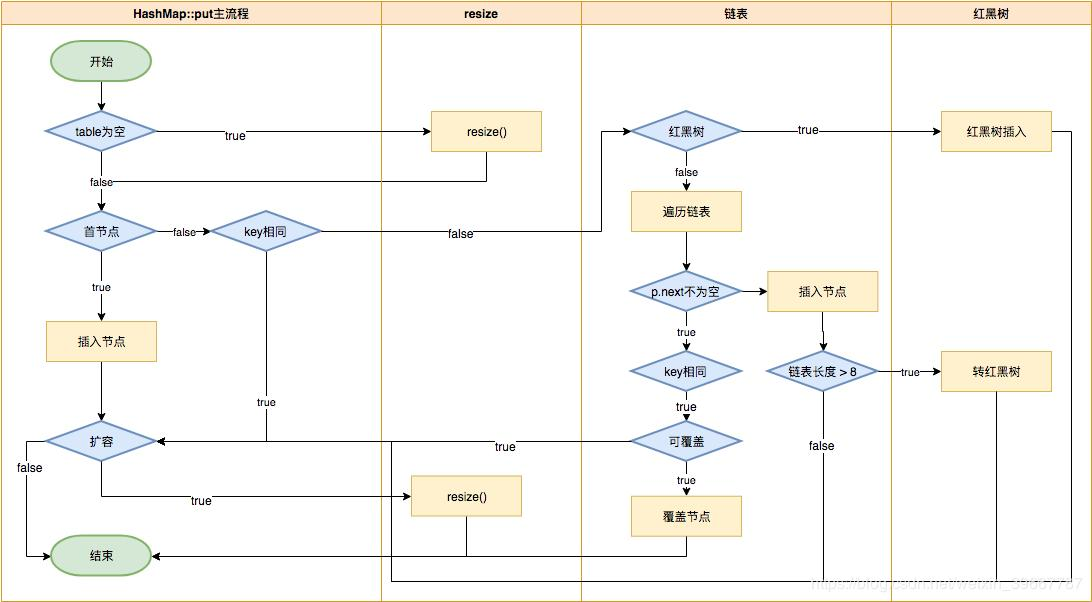
}在上述的方法中,设计三种情况:
第一种情况,数组索引位置没有键值对,处理方式就是直接把待添加键值对封装成Node添加到索引位置即可;
第二种情况,如果数组索引位置有键值对,而且封装的TreeNode节点,处理方式是调用红黑树的插入方法,把带添加键值对添加到红黑树中;
第三种情况,同样数组索引位置有键值对,但是封装的是Node节点,处理方法就比较复杂,首先把待添加键值对封装成Node节点添加到链表尾部,然后判断当前链表长度,如果达到阈值,就判断是扩容还是转换为红黑树;
public V get(Object key) {
Node<K,V> e;
return (e = getNode(hash(key), key)) == null ? null : e.value;
}
/**
* Implements Map.get and related methods
*
* @param hash hash for key
* @param key the key
* @return the node, or null if none
*/
final Node<K,V> getNode(int hash, Object key) {
Node<K,V>[] tab; Node<K,V> first, e; int n; K k;
//判断数组以及数组对应位置数组元素是否为空
if ((tab = table) != null && (n = tab.length) > 0 &&
(first = tab[(n - 1) & hash]) != null) {
//用get传递过来的Key值和对应位置第一个元素进行比较,如果相等直接返回,如果不等则进行查找
if (first.hash == hash && // always check first node
((k = first.key) == key || (key != null && key.equals(k))))
return first;
//判断第一个元素的下一个元素是否为空
if ((e = first.next) != null) {
//判断当前节点是否为树节点
if (first instanceof TreeNode)
//如果是树节点,直接通过getTreeNode拿到该节点返回
return ((TreeNode<K,V>)first).getTreeNode(hash, key);
//循环一一对比
do {
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
return e;
} while ((e = e.next) != null);
}
}
return null;
}在HashMap中,桶数组的长度均是2的幂,阈值大小为桶数组长度与负载因子的乘积。当HashMap中的键值对数量超过阈值时,就进行扩容;
扩容之后,要重新计算键值对的位置,并把它们移到合适的位置上去;
/**
* Initializes or doubles table size. If null, allocates in
* accord with initial capacity target held in field threshold.
* Otherwise, because we are using power-of-two expansion, the
* elements from each bin must either stay at same index, or move
* with a power of two offset in the new table.
*
* @return the table
*/
final Node<K,V>[] resize() {
Node<K,V>[] oldTab = table;
int oldCap = (oldTab == null) ? 0 : oldTab.length;
int oldThr = threshold;
int newCap, newThr = 0;
//如果table不为空,表明已经初始化过了
if (oldCap > 0) {
//当table容量超过容量最大值,则不再扩容
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;
}
//按旧容量或阈值的2倍计算新容量和阈值大小
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)
newThr = oldThr << 1; // double threshold
}
else if (oldThr > 0) // initial capacity was placed in threshold
//初始化时,将threshold的值赋值给newCap;
//HashMap使用threshold变量暂时保存initialCapacity参数的值
newCap = oldThr;
else { // zero initial threshold signifies using defaults
//调用无参构造方法时,桶数组容量为默认容量;阈值为默认容量与默认负载因子
newCap = DEFAULT_INITIAL_CAPACITY;
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
}
//newThr为0时,按阈值计算公式进行计算
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
threshold = newThr;
@SuppressWarnings({"rawtypes","unchecked"})
//创建新的桶数组,桶数组的初始化也是这里完成的
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
table = newTab;
if (oldTab != null) {
//如果旧的桶数组不为空,则遍历桶数组,并将键值对映射到新的桶数组中
for (int j = 0; j < oldCap; ++j) {
Node<K,V> e;
if ((e = oldTab[j]) != null) {
oldTab[j] = null;
if (e.next == null)
newTab[e.hash & (newCap - 1)] = e;
else if (e instanceof TreeNode)
//重新映射时,需要对红黑树进行拆分
((TreeNode<K,V>)e).split(this, newTab, j, oldCap);
else { // preserve order
Node<K,V> loHead = null, loTail = null;
Node<K,V> hiHead = null, hiTail = null;
Node<K,V> next;
//遍历链表,并将链表节点按原顺序进行分组
do {
next = e.next;
if ((e.hash & oldCap) == 0) {
if (loTail == null)
loHead = e;
else
loTail.next = e;
loTail = e;
}
else {
if (hiTail == null)
hiHead = e;
else
hiTail.next = e;
hiTail = e;
}
} while ((e = next) != null);
//将分组后的链表映射到新桶中
if (loTail != null) {
loTail.next = null;
newTab[j] = loHead;
}
if (hiTail != null) {
hiTail.next = null;
newTab[j + oldCap] = hiHead;
}
}
}
}
}
return newTab;
} 扩容总共做了三件事:
1.计算新桶数组的容量newCap和新阈值newThr
2.根据计算出的newCap创建新的桶数组,桶数组table也是这里进行初始化的
3.将键值对节点重新映射到新桶数组中,如果节点是TreeNode类型,则需要拆分红黑树;如果是普通节点,则节点按原顺序进行分组
标签:instance origin OLE 二分查找 还需要 速度 大于等于 机制 table
原文地址:https://www.cnblogs.com/dcv218/p/13884189.html