标签:director double pen imu erro int 读取 sop exchange
其中 Z 为整数集,N 为自然数集。
1){Z,+}为群
封闭性验证: \(\forall a_1,a_2 \in Z\), 仍有\(a_1+a_2\in Z\)
结合率验证:\(\forall a_1,a_2,a_3 \in Z\), 有\((a_1+a_2) + a_3 = a_1+(a_2 + a_3)\)
幺元验证: 当\(a_0 = 0\) , \(a_0 \in Z\),有\(\forall a \in Z\),\(a_0+a=a+a_0=a\)
逆验证:\(\forall a \in Z\), 存在\(\forall a^{-1} \in Z\),\(a+a^{-1} = a_0\)
1){N,+} 为群
封闭性验证: \(\forall a_1,a_2 \in N\), 仍有$a_1+a_2\in $N
结合率验证:\(\forall a_1,a_2,a_3 \in N\), 有\((a_1+a_2) + a_3 = a_1+(a_2 + a_3)\)
幺元验证: 当\(a_0 = 0\) , \(a_0 \in N\),有\(\forall a \in Z\),\(a_0+a=a+a_0=a\)
逆验证:\(\forall a \in N\), 存在\(\forall a^{-1} \in N\),\(a+a^{-1} = a_0\)
我们说向量和叉乘运算构成了李代数,现在请你验证它。书中对李代数的定义为:李代数由一个集合 V,一个数域 F 和一个二元运算 [,] 组成。如果它们满足以下几条性质,称 (V,F,[,]) 为一个李代数,记作 g。
请验证 \(g = (R^3,R,×)\) 构成李代数。
证:
设有 \(\vec{a}=( a_{1},a_{2},a_{3} )\) 和 \(\vec{b}=( b_{1},b_{2},b_{3} )\),其中 \(\vec{a}, \vec{b} \in {R}^{3}\)
1)封闭性验证:
? \(\vec{a}\times \vec{b}=\left [ \begin{matrix} i & j &k \\ a_{1} & a_{2} & a_{3}\\ b_{1} & b_{2} & b_{3} \end{matrix} \right ]=\left [ \begin{matrix} a_{2}b_{3}-a_{3}b_{2}\\ a_{3}b_{1}-a_{1}b_{3}\\ a_{1}b_{2}-a_{2}b_{1} \end{matrix} \right ] \in {R}^{3}\)
2)双线性验证:
设\(\vec{c}=\left ( c_{1},c_{2},c_{2} \right ) \in {R}^{3}\),\(\alpha , \beta \in {R}\)。则:
\(( \alpha \vec{a}+\beta \vec{b} )\times \vec{c}=\left [ \begin{matrix} i & j & k\\ \alpha a_{1}+\beta b_{1} & \alpha a_{2}+\beta b_{2} & \alpha a_{3}+\beta b_{3}\\ c_{1} & c_{2} & c_{3} \end{matrix} \right ]\\ =\left ( \alpha a_{2}c_{3}-\alpha a_{3}c_{2} \right )i+\left ( \beta b_{2}c_{3}-\beta b_{3}c_{2} \right )i+(\alpha a_{3}c_{1}-\alpha a_{1}c_{3})j+\left ( \beta b_{3}c_{1}-\beta b_{1}c_{3} \right )j +\left ( \alpha a_{1}c_{2}-\alpha a_{2}c_{1} \right )k\\+\left ( \beta b_{1}c_{2}-\beta b_{2}c_{1} \right )k\\ =\alpha\left [ \begin{matrix} i & j &k \\ a_{1} & a_{2} & a_{3}\\ c_{1} & c_{2} & c_{3} \end{matrix} \right ]+\beta \left [ \begin{matrix} i & j & k\\ b_{1} & b_{2} &b_{3} \\ c_{1} & c_{2} & c_{3} \end{matrix} \right ]\\=\alpha \vec{a}\times\vec{c}+\beta \vec{b} \times \vec{c}\)
同理,\(\vec{c} \times ( \alpha \vec{a}+\beta \vec{b} )=\alpha\left ( \vec{c} \times \vec{a} \right ) + \beta ( \vec{c} \times \vec{b} )\)
3)自反性验证:
? \(\vec{a} \times \vec{a} = 0\)
4)雅克比等价性验证:
? \(\vec{a} \times(\vec{b} \times \vec{c} ) +\vec{c} \times (\vec{a} \times \vec{b} ) +\vec{b} \times \left(\vec{c} \times \vec{a} \right ) =0\)
所以\(g = (R^3,R,×)\) 构成李代数。
课上给出了 SO(3) 的指数映射推导,但对于 SE(3),仅介绍了结论,没有给出详细推导。请你完成 SE(3) 指数映射部分,有关左雅可比的详细推导。
设 \(ξ = [ρ,?]^T ∈ se(3)\),它的指数映射为:
? \(exp(\xi ^{\wedge}) = \begin{bmatrix} \sum_{n=0}^{\infty }\frac{1}{n!}(\phi ^\wedge)^n & \sum_{n=0}^{\infty }\frac{1}{(n+1)!}(\phi ^\wedge)^n\rho \\ 0^T & 1 \end{bmatrix}\)
令 \(? = θa\),那么:
\(\sum_{n=0}^{\infty }\frac{1}{(n+1)!}(\phi ^\wedge)^n = \sum_{n=0}^{\infty }\frac{1}{(n+1)!}(θa ^\wedge)^n\)
Taylor展开
\(\sum_{n=0}^{\infty }\frac{1}{(n+1)!}(θa ^\wedge)^n = I + \frac{1}{2!}θa^\wedge + \frac{1}{3!}θ^2{a^\wedge}^2 + ... + \frac{1}{(n+1)!}θ^n{a^\wedge}^n \\=aa^T - a^\wedge a^\wedge + \frac{1}{2!}θa^\wedge + \frac{1}{3!}θ^2{a^\wedge}^2 + ... \\ = aa^T - \frac{(θ - \frac{1}{3!}θ^3 + \frac{1}{5!}θ^5 - ...)a^\wedge a^\wedge}{θ}+ \frac{(\frac{1}{2!}θ^2 - \frac{1}{4!}θ^4 + ...)a^\wedge }{θ}\\ = a^\wedge a^\wedge + I - \frac{\sin θ a^\wedge a^\wedge}{θ}-\frac{\cos θ a^\wedge}{θ} + \frac{a^\wedge}{θ} \\ = (1-\frac{\sin \theta}{\theta})a^\wedge a^\wedge + (\frac{1-\cos \theta }{\theta})a^\wedge + I \\= (1-\frac{\sin \theta}{\theta})(a a^T-I) + (\frac{1-\cos \theta }{\theta})a^\wedge + I \\ = \frac{\sin \theta}{\theta}I + (I-\frac{\sin\theta}{\theta})aa^T + (\frac{1-\cos \theta }{\theta})a^\wedge\)
在 SO(3) 和 SE(3) 上,有一个东西称为伴随(Adjoint)。下面请你证明 SO(3) 伴随的性质。 对于 SO(3),有:
? \(Rexp(p^∧)R^T = exp((Rp)^∧)\)
此时称 \(Ad(R) = R\)。
提示:首先你需要证明\(?a ∈R^3,Ra^∧R^T = (Ra)^∧\),参考
Taylor展开\(exp(p^∧)\),可得
\(Rexp(p^∧)R^T = R\sum_{n=0}^{\infty }\frac{{p^∧}^{n}}{n!}R^T = \sum_{n=0}^{\infty }\frac{(R{p^∧}R^T)^{n}}{n!} = exp(Rp^∧R^T) = exp((Rp)^∧)\)
我们通常会记录机器人的运动轨迹,来观察它的运动是否符合预期。大部分数据集都会提供标准轨迹 以供参考,如 kitti、TUM-RGBD 等。这些文件会有各自的格式,但首先你要理解它的内容。记世界坐标系为 W,机器人坐标系为 C,那么机器人的运动可以用 \(T_{WC}\) 或 \(T_{CW}\) 来描述。现在,我们希望画出机器 人在世界当中的运动轨迹,请回答以下问题:
1.事实上,\(T_{WC}\) 的平移部分即构成了机器人的轨迹。它的物理意义是什么?为何画出 \(T_{WC}\)的平移部分就得到了机器人的轨迹?
\(T_{WC}\) 代表的是机器人的相机 C 相对世界坐标系 W 的变换矩阵,世界坐标系 W 相对于 相机 C 是固定不动的。
\(T_{WC}\)的平移部分就得到了机器人的轨迹,是因为机器人的方向由旋转矩阵R决定,而平移是机器人的运动量,该运动量就代表了其运动轨迹。
2.我为你准备了一个轨迹文件(code/trajectory.txt)。该文件的每一行由若干个数据组成,格式为
? \([t,t_x,t_y,t_z,q_x,q_y,q_z,q_w]\),
其中 t 为时间,$t_x,t_y,t_z $为 \(T_{WC}\) 的平移部分,\(q_x,q_y,q_z,q_w\) 是四元数表示的 \(T_{WC}\) 的旋转部分,\(q_w\) 为四元数实部。同时,我为你提供了画图程序 draw_trajectory.cpp 文件。该文件提供了画图部分的代码,请你完成数据读取部分的代码,然后书写 CMakeLists.txt 以让此程序运行起来。注意我们需要用到 Pangolin 库来画图,所以你需要事先安装 Pangolin(如果你做了第一次作业,那么现 在已经安装了)。CMakeLists.txt 可以参照 ORB-SLAM2 部分。
CMakeLists.txt:
cmake_minimum_required( VERSION 2.8 )
project ( draw_trajectory )
set( CMAKE_CXX_COMPILER "g++" )
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -march=native -O3" )
############### dependencies ######################
#Pangolin
find_package(Pangolin)
include_directories( ${Pangolin_INCLUDE_DIRS})
# Eigen
include_directories( "/usr/include/eigen3" )
# Sophus
find_package( Sophus REQUIRED )
include_directories( ${Sophus_INCLUDE_DIRS} )
add_executable(draw_trajectory draw_trajectory.cpp)
target_link_libraries(draw_trajectory
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${Sophus_LIBRARIES}
)
add_executable(draw_gt_est draw_gt_est.cpp)
target_link_libraries(draw_gt_est
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${Sophus_LIBRARIES}
)
CODE:
ifstream f(trajectory_file);
while(!f.eof()) {
Eigen::Vector3d t_tra;
double t, t_x, t_y, t_z, q_x, q_y, q_z, q_w;
f >> t >> t_x >> t_y >> t_z;
t_tra << t_x, t_y, t_z;
f >> q_x >> q_y >> q_z >> q_w;
Eigen::Quaterniond q(q_w, q_x, q_y, q_z);
poses.push_back(Sophus::SE3(q, t_tra));
}
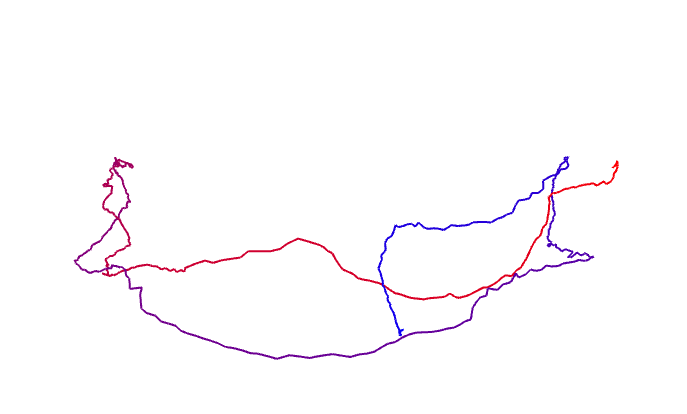
RESULT:
kieranych@kieranych-ThinkPad-Edge-E431:~/vslam/hw3/code/build$ ./draw_trajectory
除了画出真实轨迹以外,我们经常需要把 SLAM 估计的轨迹与真实轨迹相比较。下面说明比较的原 理,请你完成比较部分的代码实现。 设真实轨迹(ground-truth)为 Tg,估计轨迹 Te。它们都以 TWC 的形式存储,格式同上题。现在,你 需要计算估计轨迹的误差。我们假设每一个 Tg 都与给定的 Te 对应。那么,对于任意第 i 个位姿,它的误 差可定义为:
? \(e_i = ∥log({T_{gi}}^{-1} T_{ei})^∨∥_2\)
即两个位姿之差的李代数二范数。于是,可以定义两条轨迹的均方根(Root-Mean-Square-Error, RMSE) 误差为:
? $RMSE(g,e) =\sqrt{\frac{1}{n}\sum_{i=1}{n}e_i2} $
我为你准备了 code/ground-truth.txt 和 code/estimate.txt 两条轨迹。请你根据上面公式,实现 RMSE 的计算代码,给出最后的 RMSE 结果。作为验算,参考答案为:2.207。
CODE:
// caculate RMSE
int num = 0;
double error = 0, RMSE = 0;
Eigen::Matrix<double,6,1> tmp;
for (auto i = 0; i < gt_poses.size() - 1; i++){
tmp = (gt_poses[i].inverse()*est_poses[i]).log();
error += tmp.transpose()*tmp;
num++;
}
RMSE = sqrt(error/num);
cout<<"RMSE: "<<RMSE<<endl;
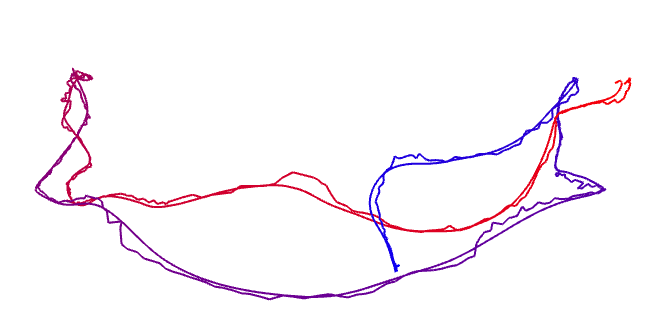
RULST:
./build/draw_gt_est
kieranych@kieranych-ThinkPad-Edge-E431:~/vslam/hw3/code/build$ ./draw_gt_est
RMSE: 2.20728
标签:director double pen imu erro int 读取 sop exchange
原文地址:https://www.cnblogs.com/yujingxiang/p/14459496.html