标签:根据 通过 相同 容器 int tput 输入输出 这一 gen
7.5 状态空间平均
现有文献中已经出现了很多变换器交流建模的方法,其中包括电流注入法,电路平均和状态空间平均法。尽管某种特定方法的支持者可能更愿意使用该方法去建模,但所有方法的最终结果都是等效的。并且所有人都具有这样的共识:平均和小信号的线性化是对PWM变换器建模的关键步骤。
本节将介绍文献中提到的状态空间平均法(S.′Cuk, Modeling, Analysis, and Design of Switching Converters, Ph.D. thesis, California Institute of Technology, November 1976)( R.D. Middlebrook, S.′Cuk, A general unified approach to modeling switching-converter power stages. Int. J. Electron. 42, 521–550 (1977))。动力学系统的状态空间描述是现代控制理论的支柱;状态空间平均法利用这一描述来得到PWM开关变换器的小信号平均方程。状态空间平均法在很多方面与7.2节所提的方法是相同的,实际上,7.2节的方法就是状态空间法,只是没有把方程表示为矩阵的形式而已。状态空间平均法处理的一个好处就是其结果的通用性:只要能写出变换器的原始状态方程,就总能获得其小信号平均模型。
7.5.1节总结了如何写出电网络的状态方程。状态空间平均的基本结果在7.5.2节中描述,并且在7.5.3节中给出了简短的推导过程。7.5.4节给出了一个示例:利用状态空间平均法推导buck-boost变换器的静态直流和小信号交流方程。
7.5.1 电网络的状态方程
状态空间描述法是描述一个系统并列写微分方程的标准形式。对于一个线性网络,状态变量的导数可以表示为系统独立输入和状态变量自身的组合。系统的物理上的状态变量通常与能量存储有关(译者:不能发生突变的量),对于典型的变换器电路,物理状态变量通常就是独立的电感电流和电容电压。其他的典型状态变量也可以为电机轴的位置和速度等。在给定的时间点,状态变量的值取决于系统先前的历史状态,而不是系统当前的输入。为了求解系统的微分方程,必须确定状态变量的初始值。因此,如果我们知道系统的状态,也就是给定时间\(t_{0}\)的所有状态变量的值,并且我们还知道系统的输入,那么原则上我们可以求解系统的状态方程来求解未来任何时刻的系统波形。
系统的状态方程可以用式(7.91)所示的矩阵形式表示:
\[\pmb{B} \frac{d\pmb{x}(t)}{dt} =\pmb{Ax}(t)+\pmb{bu}(t) \\pmb{y}(t)=\pmb{Cx}(t)+\pmb{Eu}(t) \tag{7.91}
\]
这里,状态向量\(\pmb{x}(t)\)是包含所有状态变量(电感电流,电容电压等)的一个向量。输入变量\(\pmb{u}(t)\)是包括系统所有独立输入的矢量,比如输入电压\(v_{g}(t)\)。状态向量的导数也是一个向量,其中各元素等于状态向量中各元素的导数:
\[\pmb{x}(t)=
\left[
\begin{matrix}
x_{1}(t) \ x_{2}(t) \ . \ . \
\end{matrix}
\right] \ \ \
\frac{d\pmb{x}(t)}{dt}=
\left[
\begin{matrix}
\cfrac{dx_{1}(t)}{dt} \ \cfrac{dx_{2}(t)}{dt} \ . \ . \
\end{matrix}
\right]
\tag{7.92}
\]
在式(7.91)的标准形式中,\(\pmb{K}\)是包含电容,电感和互感(如果有的话)值的矩阵,因此\(\pmb{K}d\pmb{x}/dt\)是包含电感电压和电容电流的向量。在其他物理系统中\(\pmb{K}\)可能包含其他如转动惯量或者质量。式7.91表明,系统中的电感电压和电容电流可以表示为系统输入和状态变量的线性组合。矩阵\(\pmb{A}\)和\(\pmb{B}\)包含的是比例常数。
我们可能还需要求解与状态向量\(\pmb{x}(t)\)或者输入向量\(\pmb{u}(t)\)基本单元不一致的电路波形。这些信号通常可能为:可以由状态向量和输入向量中基本单元组合而成的受控信号波形。向量\(\pmb{y}(t)\)通常被称为输出向量。不管信号是否实际上是物理输出,我们都可以自由的将任何受控信号放在这个向量中。变换器输入电流\(i_{g}(t)\)通常也被选为\(\pmb{y}(t)\)的构成元素。在状态方程式(7.91)中,\(\pmb{y}(t)\)的基本单元表示为\(\pmb{x}(t)\)和\(\pmb{u}(t)\)基本单元的线性组合。矩阵\(\pmb{C}\)和\(\pmb{E}\)包含的是比例常数。
作为例子,我们写出图7.39所示的电路状态方程。
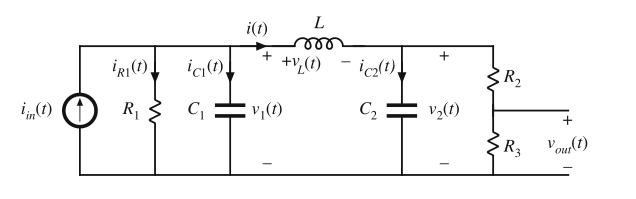
Fig. 7.39 Circuit example
电路中包含两个电容和一个电感,因此物理状态变量就是独立的电容电压\(v_{1}(t)\)和\(v_{2}(t)\)以及电感电流\(i(t)\)。因此我们可以定义状态向量为:
\[\pmb{x}(t)=
\left[
\begin{matrix}
v_{1}(t) \ v_{2}(t) \ i(t) \ \end{matrix}
\right]
\tag{7.93}
\]
由于没有耦合电感,因此矩阵\(\pmb{K}\)为对角阵,其中只包括电感和电容值:
\[\pmb{K}=
\begin{bmatrix}
C_{1}& 0& 0 \0& C_{2}& 0 \0& 0& L
\end{bmatrix}
\tag{7.94}
\]
这个电路具有一个独立输入,也就是电流源\(i_{in}(t)\)。因此我们将输入变量定义为:
\[\pmb{u}(t)=[i_{in}(t)] \tag{7.95}
\]
我们可以自由地将任何受控信号放在向量\(\pmb{y}(t)\)中,假设我们还对输出电压\(v_{out}(t)\)和电流\(i_{R1}(t)\)感兴趣。那么我们就将\(\pmb{y}(t)\)定义为:
\[\pmb{y}(t)=
\begin{bmatrix}
v_{out}(t) \i_{R1}(t)
\end{bmatrix}
\tag{7.96}
\]
为了以式(7.91)所示的规范形式写出状态方程,我们需要将电感电压和电容电流表示为\(\pmb{x}(t)\)和\(\pmb{u}(t)\)的基本单元的线性组合,也就是\(v_{1}(t)\),\(v_{2}(t)\)和\(i_{in}(t)\)的线性组合。
由节点方程可知,电容电流\(i_{C1}(t)\)为:
\[i_{C1}(t)=C_{1} \frac{dv_{1}(t)}{dt}=i_{in}(t)-\frac{v_{1}(t)}{R}-i(t) \tag{7.97}
\]
这个方程将成为矩阵方程(7.91)的第一行。那么电容电流\(i_{C2}(t)\)由节点方程可以得到:
\[i_{C2}(t)=C_{2} \frac{dv_{2}(t)}{dt}=i(t)- \frac{v_{2}(t)}{R_{2}+R_{3}} \tag{7.98}
\]
请注意,我们仔细的将这个电流表示为\(\pmb{x}(t)\)和\(\pmb{u}(t)\)的线性组合。根据环路方程可以得到电感电压:
\[v_{L}(t)=L \frac{di(t)}{dt}=v_{1}(t)-v_{2}(t) \tag{7.99}
\]
方程(7.97)到(7.99)可以写为如下的矩阵形式:
\[\begin{bmatrix}
C_{1}& 0& 0 \0& C_{2}& 0 \0& 0& L
\end{bmatrix}
\begin{bmatrix}
\cfrac{dv_{1}(t)}{dt} \ \cfrac{dv_{2}(t)}{dt} \ \cfrac{di(t)}{dt}
\end{bmatrix}
=\begin{bmatrix}
-\cfrac{1}{R_{1}}& 0& -1 \0& -\cfrac{1}{R_{2}+R_{3}}& 0 \1& -1& 0
\end{bmatrix}
\begin{bmatrix}
v_{1}(t) \ v_{2}(t) \ i(t) \ \end{bmatrix}+
\begin{bmatrix}
1 \ 0 \ 0
\end{bmatrix}
[i_{in}(t)] \tag{7.100}
\]
现在对于式(7.91)中的矩阵\(\pmb{A}\)和\(\pmb{B}\)就是已知的了。
同样的,还需要将\(\pmb{y}(t)\)表示为\(\pmb{x}(t)\)和\(\pmb{u}(t)\)基本单元的线性组合。通过对图7.39的分析,\(v_{out}(t)\)可以被表示为:
\[v_{out}(t)=v_{2}(t) \frac{R_{3}}{R_{2}+R_{3}} \tag{7.101}
\]
同理,\(i_{R1}(t)\)可以表示为:
\[i_{R1}(t)=\frac{v_{1}(t)}{R_{1}} \tag{7.102}
\]
将式(7.101)和(7.102)合并为(7.91)中的标准矩阵,可以得到:
\[\begin{bmatrix}
v_{out}(t) \i_{R1}(t) \\end{bmatrix}=
\begin{bmatrix}
0 & \cfrac{R_{3}}{R_{2}+R_{3}} & 0 \\cfrac{1}{R_{1}} & 0 & 0 \\end{bmatrix}
\begin{bmatrix}
v_{1}(t) \v_{2}(t) \i(t)
\end{bmatrix}+
\begin{bmatrix}
0 \0 \\end{bmatrix}
[i_{in}(t)]
\tag{7.103}
\]
那么现在,就可以确定了式(7.91)中的矩阵\(\pmb{C}\)和\(\pmb{E}\)。
应该认识到的是,从第2章我们一直都是用变换器的状态方程进行分析的,只不过现在我们是用矩阵的形式来表示的而已。
7.5.2 基本状态空间模型
现在考虑一个工作于CCM下的PWM变换器。变换器包含形成状态向量\(\pmb{x}(t)\)的独立状态,并由形成输入向量\(\pmb{u}(t)\)的独立源驱动。在第一个子区间内,当开关处于位置1时,变换器简化为一个可以由下面的状态方程描述的电路。
\[\pmb{K} \frac{d\pmb{x}(t)}{dt}=\pmb{A_{1}} \pmb{x}(t)+\pmb{B_{1}} \pmb{u}(t) \\pmb{y}(t)=\pmb{C_{1}} \pmb{x}(t)+\pmb{E_{1}} \pmb{u}(t) \tag{7.104}
\]
在第二个子区间内,开关处于位置2,变换器简化为另一个电路,其状态方程为:
\[\pmb{K} \frac{d\pmb{x}(t)}{dt}=\pmb{A_{2}} \pmb{x}(t)+\pmb{B_{2}} \pmb{u}(t) \\pmb{y}(t)=\pmb{C_{2}} \pmb{x}(t)+\pmb{E_{2}} \pmb{u}(t) \tag{7.104}
\]
在这两个子区间内,电路的基本单元连接方式不同;因此相应的状态方程矩阵\(\pmb{A_{1}},\pmb{B_{1}},\pmb{C_{1}},\pmb{E_{1}}\)和\(\pmb{A_{2}},\pmb{B_{2}},\pmb{C_{2}},\pmb{E_{2}}\)也是有所不同。对这些状态方程,其状态空间平均的结果就可以得到稳态模型和小信号交流模型的状态方程。
假设变换器的固有频率(译者:直流频率为零,交流为基波频率)以及变换器的输入的变化频率远小于开关频率。那么描述变换器稳态的状态空间平均模型为:
\[\pmb{0=AX+BU} \\pmb{Y=CX+EU} \tag{7.106}
\]
其中,平均矩阵为:
\[\pmb{A}=D \pmb{A_{1}}+D^{‘} \pmb{A_{2}} \\pmb{B}=D \pmb{B_{1}}+D^{‘} \pmb{B_{2}} \\pmb{C}=D \pmb{C_{1}}+D^{‘} \pmb{C_{2}} \\pmb{E}=D \pmb{E_{1}}+D^{‘} \pmb{E_{2}} \tag{7.107}
\]
稳态直流分量为:
\[\pmb{X}=稳态(直流)状态向量 \\pmb{U}=稳态(直流)输入向量 \\pmb{Y}=稳态(直流)输出向量 \D=稳态(直流)占空比 \tag{7.108}
\]
式(7.108)定义的量代表了各个平均向量的稳态值。可以通过求解式(7.106)得到稳态值和输出向量:
\[\pmb{X}=-\pmb{A^{-1}BU} \\pmb{Y}=\pmb{(CA^{-1}B+E)U} \tag{7.109}
\]
小信号交流模型的状态方程:
\[\pmb{K} \frac{d\hat{\pmb{x}(t)}}{dt}=\pmb{A} \hat{\pmb{x}}(t)+\pmb{B} \hat{\pmb{u}}(t)-\{(\pmb{A_{1}-A_{2}})\pmb{X} + (\pmb{B_{1}-B_{2}})\pmb{U} \}\hat{d}(t) \\pmb{\hat{y}}(t)=\pmb{C} \hat{\pmb{x}}(t)+\pmb{E} \hat{\pmb{u}}(t)-\{(\pmb{C_{1}-C_{2}})\pmb{X} + (\pmb{E_{1}-E_{2}})\pmb{U} \}\hat{d}(t) \tag{7.110}
\]
式(7.110)中的\(\hat{\pmb{x}(t)},\hat{\pmb{u}}(t),\hat{\pmb{y}(t)}\)等值是关于式(7.106)到(7.109)定义的静态工作点的交流小变化量。
因此,如果我们能写出式(7.104)和(7.105)的变换器状态方程,那么我们总能通过式(7.106)到(7.110)求解出平均直流和小信号交流模型。
7.5.3 状态空间平均结果的讨论
在7.1和7.2节中,电感电流和电容电压的低频分量通过对\(T_{s}\)长度的区间内平均进行建模。因此我们定义状态向量的平均为:
\[<\pmb{x}(t)>_{T_{s}}= \cfrac{1}{T_{s}} \int _{t-T_{s}/2} ^{t+T_{s}/2} \pmb{x}(\tau)d{\tau} \tag{7.111}
\]
输入输出向量的低频分量以同样的方式进行建模。通过对电感电流和电容电压的平均,可以获得如下所示的状态方程:
\[\pmb{K} \cfrac{d<\pmb{x}(t)>_{T_{s}}}{dt}=(d(t)\pmb{A_{1}}+d^{‘}(t)\pmb{A_{2}})<\pmb{x}(t)>_{T_{s}}+(d(t)\pmb{B_{1}}+d^{‘}(t)\pmb{B_{2}})<\pmb{u}(t)>_{T_{s}} \tag{7.112}
\]
这个结果与式(7.2)是等效的。
现在让我们来考虑状态向量\(\pmb{x}(t)\)中的元素在一个开关周期中是如何变化的。在开关位于位置1的第一个子区间内,变换器状态方程由式(7.104)给出。因此,\(\pmb{x}(t)\)中的元素以斜率\(\pmb{K^{-1}}(\pmb{A_{1}x}(t)+\pmb{B_{1}u}(t))\)变化。如果我们应用小纹波近似,那么\(\pmb{x}(t)\)和\(\pmb{u}(t)\)在一个开关周期内基本没有什么变化,也就是,其斜率基本恒定并近似等于:
\[\cfrac{d\pmb{x}(t)}{dt}=\pmb{K^{-1}}(\pmb{A_{1}}<\pmb{x}(t)>_{T_{s}}+\pmb{B_{1}}<\pmb{u}(t)>_{T_{s}}) \tag{7.113}
\]
这个假设与\(\pmb{x}(t)\)中的所有元素的小纹波近似的要求是一致的,并且\(\pmb{u}(t)\)的变化远低于开关频率(译者:也就是,采用这种平均建模方法后,其有效研究频率范围要远小于开关频率)。如果我们假设状态向量的初始值为\(\pmb{x}(0)\),那么可以写出:
\[\pmb{x}(dT_{s})=\pmb{x}(0)+(dT_{s})\pmb{K^{-1}}(\pmb{A_{1}}<\pmb{x}(t)>_{T_{s}}+\pmb{B_{1}}<\pmb{u}(t)>_{T_{s}}) \tag{7.114}
\]
在第二个子区间内也利用类似的方法。当开关位于位置2时,状态方程由式(7.115)给出。通过在该子区间应用小纹波近似,那么状态向量就会以如下式斜率变化:
\[\cfrac{d\pmb{x}(t)}{dt}=\pmb{K^{-1}}(\pmb{A_{2}}<\pmb{x}(t)>_{T_{s}}+\pmb{B_{2}}<\pmb{u}(t)>_{T_{s}}) \tag{7.115}
\]
一个开关周期结束时,状态变量为:
\[\pmb{x}(T_{s})=\pmb{x}(dT_{s})+(d^{‘}T_{s})\pmb{K^{-1}}(\pmb{A_{2}}<\pmb{x}(t)>_{T_{s}}+\pmb{B_{2}}<\pmb{u}(t)>_{T_{s}}) \tag{7.116}
\]
将式(7.114)代入到(7.116)后,可以利用\(\pmb{x}(0)\)来表示\(\pmb{x}(T_{s})\):
\[\pmb{x}(T_{s})=\pmb{x}(0)+(dT_{s})\pmb{K^{-1}}(\pmb{A_{1}}<\pmb{x}(t)>_{T_{s}}+\pmb{B_{1}}<\pmb{u}(t)>_{T_{s}})\+(d^{‘}T_{s})\pmb{K^{-1}}(\pmb{A_{2}}<\pmb{x}(t)>_{T_{s}}+\pmb{B_{2}}<\pmb{u}(t)>_{T_{s}}) \tag{7.117}
\]
合并同类项可得:
\[\pmb{x}(T_{s})=\pmb{x}(0)+T_{s}\pmb{K^{-1}}(d(t)\pmb{A_{1}}+d^{‘}(t)\pmb{A_{2}})<\pmb{x}(t)>_{T_{s}}\+T_{s}\pmb{K^{-1}}(d(t)\pmb{B_{1}}+d^{‘}(t)\pmb{B_{2}})<\pmb{u}(t)>_{T_{s}}
\tag{7.118}
\]
接下来,让我们用一个开关周期内,\(\pmb{x}(t)\)的单位变化量来近似\(<\pmb{x}(t)>_{T_{s}}\)的导数:
\[\cfrac{d<\pmb{x}(t)>_{T_{s}}}{dt} \approx \frac{\pmb{x}(T_{s})-\pmb{x}(0)}{T_{s}} \tag{7.119}
\]
将式(7.118)代入(7.119):
\[\pmb{K} \cfrac{d<\pmb{x}(t)>_{T_{s}}}{dt}=(d(t)\pmb{A_{1}}+d^{‘}(t)\pmb{A_{2}})<\pmb{x}(t)>_{T_{s}}+(d(t)\pmb{B_{1}}+d^{‘}(t)\pmb{B_{2}})<\pmb{u}(t)>_{T_{s}} \tag{7.120}
\]
这与式(7.113)是相同的。这就是变换器动态模型的基本平均方程。由于控制输入\(d(t)\)与\(<\pmb{x}(t)>_{T_{s}}\)和\(<\pmb{u}(t)>_{T_{s}}\)相乘,所以这是一个非线性的方程。图7.40给出了\(\pmb{x}(t)\)一个典型变量的变化和其平均值。
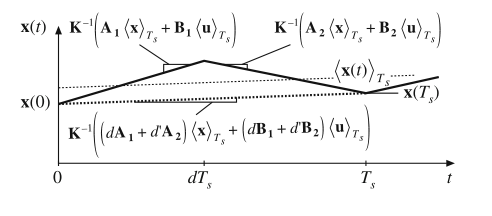
Fig. 7.40 How an element of the state vector, and its average, evolve over one switching period
那么同样,我们还希望通过求平均来确定输出矢量\(\pmb{y}(t)\)的低频分量。向量\(\pmb{y}(t)\)在第一个子区间可以通过式(7.104)描述,第二个子区间可以通过(7.105)描述。因此,如图7.41,\(\pmb{y}(t)\)在开关切换时可能是不连续的。我们同样可以通过对一个开关周期求平均来去除开关谐波。其结果为:
\[<\pmb{y}(t)>_{T_{s}}=d(t)(\pmb{C_{1}}<\pmb{x}(t)>_{T_{s}}+\pmb{E_{1}}<\pmb{u}(t)>_{T_{s}} )\+d^{‘}(t)(\pmb{C_{2}}<\pmb{x}(t)>_{T_{s}}+\pmb{E_{2}}<\pmb{u}(t)>_{T_{s}} )
\tag{7.121}
\]
重新整理上式:
\[<\pmb{y}(t)>_{T_{s}}=(d(t)\pmb{C_{1}}+d^{‘}(t)\pmb{C_{2}})<\pmb{x}(t)>_{T_{s}}+(d(t)\pmb{E_{1}}+d^{‘}(t)\pmb{E_{2}})<\pmb{u}(t)>_{T_{s}} \tag{7.122}
\]
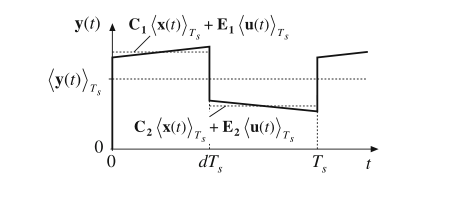
Fig. 7.41 Averaging an element of the output vector y(t)
这同样又是一个非线性方程。将式(7.120)和(7.122)的平均状态方程整理如下:
\[\pmb{K} \cfrac{d<\pmb{x}(t)>_{T_{s}}}{dt}=(d(t)\pmb{A_{1}}+d^{‘}(t)\pmb{A_{2}})<\pmb{x}(t)>_{T_{s}}+(d(t)\pmb{B_{1}}+d^{‘}(t)\pmb{B_{2}})<\pmb{u}(t)>_{T_{s}} \<\pmb{y}(t)>_{T_{s}}=(d(t)\pmb{C_{1}}+d^{‘}(t)\pmb{C_{2}})<\pmb{x}(t)>_{T_{s}}+(d(t)\pmb{E_{1}}+d^{‘}(t)\pmb{E_{2}})<\pmb{u}(t)>_{T_{s}}
\tag{7.123}
\]
接下来的步骤就是将上述方程关于某个静态工作点进行线性化,得到其小信号交流模型。当直流输入\(d(t)=D,\pmb{u}(t)=\pmb{U}\)时,在\(<\pmb{x}>_{T_{s}}\)的所有元素的导数都为0时,变换器工作于稳态。因此,通过将式(7.123)中\(<\pmb{x}>_{T_{s}}\)的导数设为0时,就可以求解变换器的静态工作点:
\[\pmb{0=AX+BU} \\pmb{Y=CX+EU} \tag{7.124}
\]
这个定义实际已经在式(7.107)和(7.108)中使用过了。那么我们现在来关于这个静态工作点进行扰动和线性化:
\[<\pmb{x}(t)>_{T_{s}}=\pmb{X}+\pmb{\hat{x}}(t) \<\pmb{u}(t)>_{T_{s}}=\pmb{U}+\pmb{\hat{u}}(t) \<\pmb{y}(t)>_{T_{s}}=\pmb{Y}+\pmb{\hat{y}}(t) \d(t)=D+\hat{d}(t) \Rightarrow d^{‘}(t)=D^{‘}-\hat{d}(t) \tag{7.125}
\]
这里,\(\pmb{\hat{u}}(t)\)和\(\hat{d}(t)\)是输入向量和占空比的交流小变化值(译者:也就是扰动量)。向量\(\pmb{\hat{x}}(t)\)和\(\pmb{\hat{y}}(t)\)是状态向量和输出乡里那个中的交流小扰动量。我们必须假设这些小扰动量相比静态工作点的值要足够的小,换句话说就是要满足:
\[||\pmb{U}||>>||\pmb{\hat{u}}(t)|| \D>>||\hat{d}(t)|| \||\pmb{X}||>>||\pmb{\hat{x}}(t)|| \||Y||>>||\pmb{\hat{y}}(t)||
\tag{7.126}
\]
这里,\(||\pmb{x}||\)表示向量\(\pmb{x}\)的范数。
将式(7.125)代入式(7.123)得到:
\[\pmb{K} \cfrac{d(\pmb{X}+\pmb{\hat{x}}(t))}{dt}=((D+\hat{d}(t))\pmb{A_{1}}+(D^{‘}-\hat{d}(t))\pmb{A_{2}})(\pmb{X}+\pmb{\hat{x}}(t)) \+((D+\hat{d}(t))\pmb{B_{1}}+(D^{‘}-\hat{d}(t))\pmb{B_{2}})(\pmb{U}+\pmb{\hat{u}}(t)) \(\pmb{Y}+\pmb{\hat{y}}(t))=((D+\hat{d}(t))\pmb{C_{1}}+(D^{‘}-\hat{d}(t))\pmb{C_{2}})(\pmb{X}+\pmb{\hat{x}}(t)) \+((D+\hat{d}(t))\pmb{B_{1}}+(E^{‘}-\hat{d}(t))\pmb{E_{2}})(\pmb{U}+\pmb{\hat{u}}(t))
\tag{7.127}
\]
其中\(d\pmb{X}/dt\)为0。合并同类项得到:
\[\pmb{K} \cfrac{d\pmb{\hat{x}}(t)}{dt}=(\pmb{AX+BU})+\pmb{A\hat{x}}(t)+\pmb{B\hat{u}(t)+\{ ({A_{1}-A_{2})X}+{B_{1}-B_{2})U}} \}\hat{d}(t) \+(\pmb{A_{1}-A_{2}})\pmb{\hat{x}(t)}\hat{d}(t)+(\pmb{B_{1}-B_{2}})\pmb{\hat{u}(t)}\hat{d}(t) \(\pmb{Y}+\pmb{\hat{y}}(t))=(\pmb{CX+EU})+{C\hat{x}}(t)+\pmb{E\hat{u}(t)+\{ ({C_{1}-C_{2})X}+{E_{1}-E_{2})U}} \}\hat{d}(t) \+(\pmb{C_{1}-C_{2}})\pmb{\hat{x}(t)}\hat{d}(t)+(\pmb{E_{1}-E_{2}})\pmb{\hat{u}(t)}\hat{d}(t)
\tag{7.128}
\]
由于直流分量满足式(7.124),将其从(7.128)中消去。同时,如果式(7.126)的小信号假设满足,那么式(7.128)中的二阶非线性项在幅值上相比一阶项就足够的小。然后,我们忽略这些非线性项之后,就可以获得如下所示小信号交流模型:
\[\pmb{K} \cfrac{d\pmb{\hat{x}}(t)}{dt}=\pmb{A\hat{x}}(t)+\pmb{B\hat{u}(t)+\{ ({A_{1}-A_{2})X}+{B_{1}-B_{2})U}} \}\hat{d}(t) \\pmb{\hat{y}}(t)=\pmb{C\hat{x}}(t)+\pmb{E\hat{u}(t)+\{ ({C_{1}-C_{2})X}+{E_{1}-E_{2})U}} \}\hat{d}(t) \\tag{7.129}
\]
这个结果就是我们所期望得到的,并且,其与式(7.109)是一致的。
7.5.4 示例:非理想Buck-boost变换器的状态空间平均
让我们来讲状态空间平均法用于对图7.42所示的buck-boost变换器进行建模。我们将通过导通电阻\(R_{on}\)对MOSFET \(Q_{1}\)的损耗进行建模,并通过电压值为\(V_{D}\)的独立电压源对二极管的导通压降进行建模。我们希望得到一个对变换器输入端口和输出端口都进行建模的完整的等效电路。
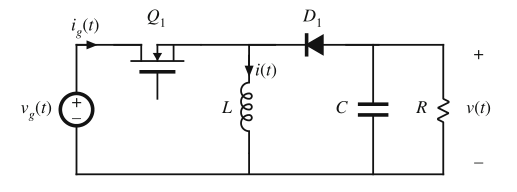
Fig. 7.42 Buck–boost converter example
该变换器的独立状态为电感电流\(i(t)\)和电容电压\(v(t)\)。那么我们可以定义状态向量\(\pmb{x}(t)\)为:
\[\pmb{x}(t)=
\begin{bmatrix}
i(t) \v(t)
\end{bmatrix} \tag{7.130}
\]
输入电压\(v_{g}(t)\)作为独立源应该被归为输入向量\(\pmb{u}(t)\)中。除此之外,我们还选择将二极管导通压降\(V_{D}\)建模为独立电压源,所以这个电压也应该被归为输入向量中,也就是:
\[\pmb{u}(t)=
\begin{bmatrix}
v_{g}(t)\V_{D}
\end{bmatrix} \tag{7.131}
\]
为了对变换器输入端口建模,我们需要确定输入电流\(i_{g}(t)\)。由于我们需要计算这个电流,所以将其归为\(\pmb{y}(t)\)中。所以,\(\pmb{y}(t)\)被定义为:
\[\pmb{y}(t)=
\begin{bmatrix}
i_{g}(t)
\end{bmatrix} \tag{7.132}
\]
由于\(v(t)\)已经被包含于状态变量\(\pmb{x}(t)\)中了,所以,不需要将其包含于\(\pmb{y}(t)\)中。
接下来,让我们写出每个子区间的状态方程。当开关位于位置1时(译者:实际上是开关导通,文中继承了前面章节的说法),获得了如图7.43a所示的电路。电感电压,电容电流以及变换器输入电流为:
\[\begin{matrix}
L \cfrac{di(t)}{dt}=v_{g}(t)-i(t)R_{on} \C \cfrac{dv(t)}{dt}=-\cfrac{v(t)}{R} \i_{g}(t) =i(t)
\end{matrix} \tag{7.133}
\]
这些方程可以写为如下所示的状态空间形式:
\[\begin{bmatrix}
L & 0\0 &C
\end{bmatrix}
\cfrac{d}{dt}
\begin{bmatrix}
i(t)\v(t)
\end{bmatrix}=
\begin{bmatrix}
-R_{on} & 0\0 &-\cfrac{1}{R}
\end{bmatrix}
\begin{bmatrix}
i(t)\v(t)
\end{bmatrix}+
\begin{bmatrix}
1 &0\0 &0
\end{bmatrix}
\begin{bmatrix}
v_{g}(t)\V_{D}
\end{bmatrix} \tag{7.134}
\]
\[\begin{bmatrix}
i_{g}(t)
\end{bmatrix}=
\begin{bmatrix}
1 &0
\end{bmatrix}
\begin{bmatrix}
i(t) \v(t)
\end{bmatrix}+
\begin{bmatrix}
0 &0
\end{bmatrix}
\begin{bmatrix}
v_{g}(t) \V_{D}
\end{bmatrix}
\]
那么此时,我们就确定了状态方程的矩阵\(\pmb{A_{1},B_{1},C_{1},E_{1}}\)。
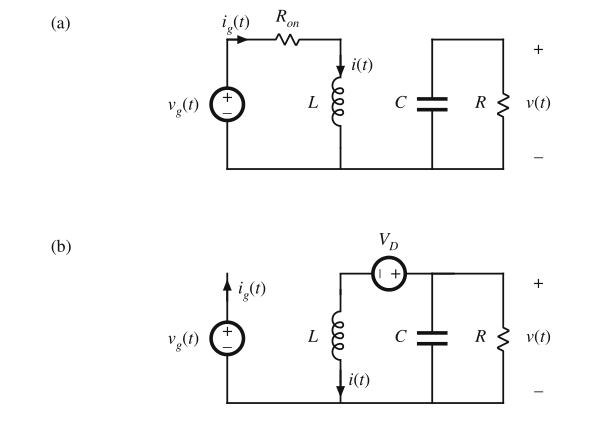
Fig. 7.43 Buck–boost converter circuit: (a) during subinterval 1, (b) during subinterval 2
当开关位于位置2时,变换器电路变为图7.43b。在这个子区间内,电感电压,电容电流以及变换器输入电流为:
\[\begin{matrix}
L \cfrac{di(t)}{dt}=v(t)-V_{D} \C \cfrac{dv(t)}{dt}=-\cfrac{v(t)}{R}-i(t) \i_{g}(t) =0
\end{matrix} \tag{7.135}
\]
同样的,将其写为状态空间形式:
\[\begin{bmatrix}
L & 0\0 &C
\end{bmatrix}
\cfrac{d}{dt}
\begin{bmatrix}
i(t)\v(t)
\end{bmatrix}=
\begin{bmatrix}
0 & 1\-1 &-\cfrac{1}{R}
\end{bmatrix}
\begin{bmatrix}
i(t)\v(t)
\end{bmatrix}+
\begin{bmatrix}
0 &-1\0 &0
\end{bmatrix}
\begin{bmatrix}
v_{g}(t)\V_{D}
\end{bmatrix} \tag{7.136}
\]
\[\begin{bmatrix}
i_{g}(t)
\end{bmatrix}=
\begin{bmatrix}
0 &0
\end{bmatrix}
\begin{bmatrix}
i(t) \v(t)
\end{bmatrix}+
\begin{bmatrix}
0 &0
\end{bmatrix}
\begin{bmatrix}
v_{g}(t) \V_{D}
\end{bmatrix}
\]
此时我们就确定了状态方程的矩阵\(\pmb{A_{2},B_{2},C_{2},E_{2}}\)。
下一步就是分析式(7.106)到(7.108)的稳态下平均方程。平均矩阵\(\pmb{A}\)为:
\[\pmb{A}=D\pmb{A_{1}}+D^{‘}\pmb{A_{2}}=D
\begin{bmatrix}
-R_{on} & 0\0 &-\cfrac{1}{R}
\end{bmatrix}
+D^{‘}
\begin{bmatrix}
0 & 1\-1 &-\cfrac{1}{R}
\end{bmatrix}=
\begin{bmatrix}
-DR_{on} & D^{‘}\-D^{‘} &-\cfrac{1}{R}
\end{bmatrix} \tag{7.137}
\]
以类似的方式,平均矩阵\(\pmb{B,C,E}\)都可以得到,其结果为:
\[\begin{matrix}
\pmb{B}=D\pmb{B_{1}}+D^{‘}\pmb{B_{2}}=
\begin{bmatrix}
D &D^{‘} \0 & 0
\end{bmatrix} \\pmb{C}=D\pmb{C_{1}}+D^{‘}\pmb{C_{2}}=
\begin{bmatrix}
D & 0
\end{bmatrix} \\pmb{E}=D\pmb{E_{1}}+D^{‘}\pmb{E_{2}}=
\begin{bmatrix}
0 & 0
\end{bmatrix}
\end{matrix} \tag{7.138}
\]
那么式(7.106)的直流状态方程为:
\[\begin{matrix}
\begin{bmatrix}
0\0
\end{bmatrix}=
\begin{bmatrix}
-DR_{on} & D^{‘} \-D^{‘} & -\cfrac{1}{R}
\end{bmatrix}
\begin{bmatrix}
I \V
\end{bmatrix}+
\begin{bmatrix}
D & -D^{‘} \0 & 0
\end{bmatrix}
\begin{bmatrix}
V_{g} \V_{D}
\end{bmatrix}
\\begin{bmatrix}
I_{g}
\end{bmatrix}=
\begin{bmatrix}
D & 0
\end{bmatrix}
\begin{bmatrix}
I \V
\end{bmatrix}+
\begin{bmatrix}
0 & 0
\end{bmatrix}
\begin{bmatrix}
V_{g} \V_{D}
\end{bmatrix}
\end{matrix} \tag{7.139}
\]
对式(7.109)进行分析,就可以得到关于稳态下输出向量的解:
\[\begin{matrix}
\begin{bmatrix}
I\V
\end{bmatrix}=
\cfrac{1}{1+\cfrac{D}{D^{‘2}}\cfrac{R_{on}}{R}}
\begin{bmatrix}
\cfrac{D}{D^{‘2}R} & \cfrac{1}{D^{‘}R} \-\cfrac{D}{D^{‘}} &1
\end{bmatrix}
\begin{bmatrix}
V_{g} \V_{D}
\end{bmatrix}
\\begin{bmatrix}
I_{g}
\end{bmatrix}=
\cfrac{1}{1+\cfrac{D}{D^{‘2}}\cfrac{R_{on}}{R}}
\begin{bmatrix}
\cfrac{D}{D^{‘2}R} & \cfrac{1}{D^{‘}R}
\end{bmatrix}
\begin{bmatrix}
V_{g} \V_{D}
\end{bmatrix}
\end{matrix} \tag{7.140}
\]
因此,图7.44所示的稳态等效电路就可以由式(7.139)来构造。实际上,式(7.139)的第一行就是对电感应用伏秒平衡原理得到的,同理,第二行是对电容应用电容电荷平衡得到。\(i_g\)(t)的方程表示了变换器输入电流的直流分量。通过对这三个方程的等效构建,就得到了图7.44的直流等效电路。
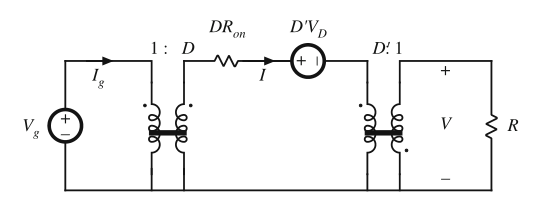
Fig. 7.44 Dc circuit model for the buck–boost converter model, equivalent to Eq. (7.139)
而小信号模型是由式(7.110)分析得到的(译者:原文写成109式)。在式中,\(\hat{d}(t)\)的向量系数为:
\[\begin{matrix}
(\pmb{A_{1}-A_{2}})\pmb{X} + (\pmb{B_{1}-B_{2}})\pmb{U}=
\begin{bmatrix}
-V-IR_{on}\I
\end{bmatrix}+
\begin{bmatrix}
V_{g}+V_{D}\0
\end{bmatrix}=
\begin{bmatrix}
V_{g}-V-IR_{on}+V_{D}\I
\end{bmatrix}
\(\pmb{C_{1}-C_{2}})\pmb{X} + (\pmb{E_{1}-E_{2}})\pmb{U}=
\begin{bmatrix}
I
\end{bmatrix}
\end{matrix} \tag{7.141}
\]
从而,式(7.110)的小信号交流模型就变为:
\[\begin{matrix}
\begin{bmatrix}
L &0\0 &C
\end{bmatrix}
\cfrac{d}{dt}
\begin{bmatrix}
\hat{i}(t)\\hat{v}(t)
\end{bmatrix}=
\begin{bmatrix}
-DR_{on} &D^{‘}\-D^{‘} & -\cfrac{1}{R}
\end{bmatrix}
\begin{bmatrix}
\hat{i}(t)\\hat{v}(t)
\end{bmatrix}+
\begin{bmatrix}
D & -D^{‘}\0 &0
\end{bmatrix}
\begin{bmatrix}
\hat{v}_{g}(t)\0
\end{bmatrix} \+\begin{bmatrix}
V_{g}-V-IR_{on}+V_{D}\I
\end{bmatrix}
\hat{d}(t) \tag{7.142}
\\begin{bmatrix}
\hat{i}_{g}(t)
\end{bmatrix}=
\begin{bmatrix}
D &0
\end{bmatrix}
\begin{bmatrix}
\hat{i}(t)\\hat{v}(t)
\end{bmatrix}+
\begin{bmatrix}
0 &0
\end{bmatrix}
\begin{bmatrix}
\hat{v}_{g}(t)\0
\end{bmatrix}
+
\begin{bmatrix}
I
\end{bmatrix}
\hat{d}(t)
\end{matrix}
\]
请注意,由于二极管正向导通压降建模为恒压源\(V_{D}\),所以这个源中没有交流变化,并且\(\hat{v}_{D}(t)\)等于0。此时,与式(7.142)等效的电路模型就可以用之前的方式构建出来了。当以标量形式表示时,式(7.142)变为:
\[\begin{matrix}
L \cfrac{d\hat{i}(t)}{dt}=D^{‘}\hat{v}(t)-DR_{on}\hat{i}(t)+D\hat{v}_{g}(t)+(V_{g}-V-IR_{on}+V_{D})\hat{d}(t) \C \cfrac{d\hat{v}(t)}{dt}=-D^{‘}\hat{i}(t)-\cfrac{\hat{v}(t)}{R}+I\hat{d}(t) \\hat{i}_{g}(t)=D\hat{i}(t)+I\hat{d}(t) \tag{7.413}
\end{matrix}
\]
与这些等式相对应的电路在图7.45中给出,并且利用这些电路就可以得到如图7.46所示的完整的小信号交流等效模型。
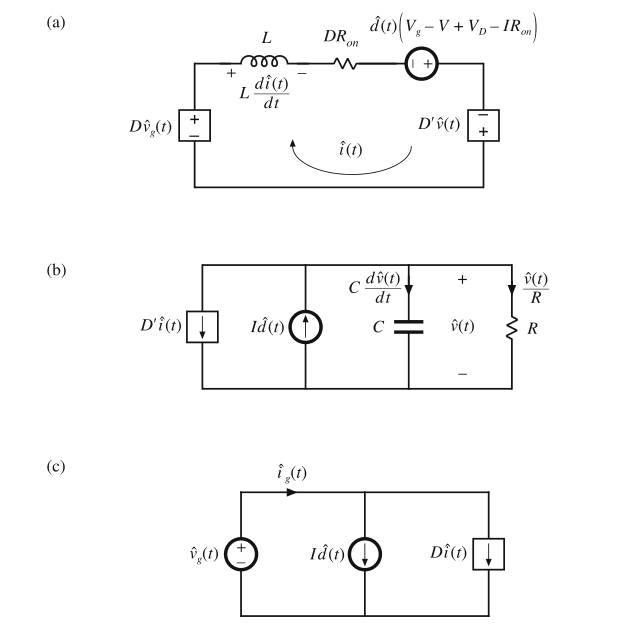
Fig. 7.45 Circuits equivalent to the small-signal converter equations: (a) inductor loop, (b) capacitor
node, (c) input port
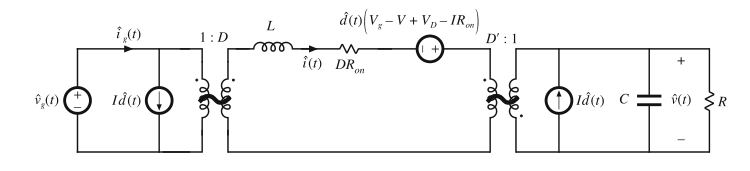
Fig. 7.46 Complete small-signal ac equivalent circuit model, nonideal buck–boost converter example
7.5.5 示例:考虑ESR的Boost变换器状态空间平均
作为最后一个示例,让我们利用状态空间平均来推导图7.47所示的非理想Boost变换器的模型。该电路包含了一个用于对电容等效串联电阻进行建模的\(R_{C}\);其中虚线框中为包含理想电容与ESR \(R_{C}\)的电容模型。学生在推导该电路的平均方程时常感到困难,而状态空间平均法就为正确推导平均模型提供了一个框架思路。除了电容的ESR,我们认为所有元件都是理想的。
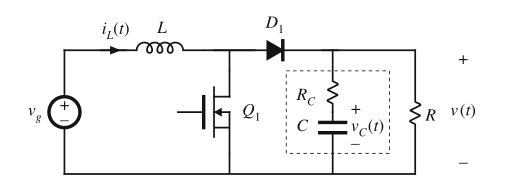
Fig. 7.47 Boost converter circuit, including capacitor equivalent series resistance \(R_{C}\)
如图7.48所示,电容ESR导致输出电压\(v(t)\)变得不连续。当二极管导通时,电感电流使得输出电压增大为\(i_{L}(t)R//R_{C}\),从而使输出电压在一个开关周期内呈现出不连续的现象。因此,我们就不能尝试对输出电压应用小纹波近似。另一方面,电容模型中的理想电容器部分电压\(v_{C}(t)\)是连续的并且有小纹波。
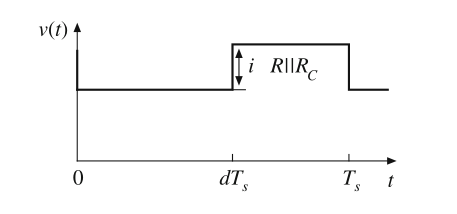
Fig. 7.48 The capacitor ESR causes the output voltage waveform v(t) to become discontinuous
这个电路的独立状态就是电感电流\(i_{L}(t)\)和电容电压\(v_{C}(t)\)。请注意,这里的电容电压\(v_{C}(t)\)是电容模型中的理想电容的电压。那么状态向量\(\pmb{x}(t)\)就被定义为:
\[\pmb{x}(t)=
\begin{bmatrix}
i_{L}(t) \v_{C}(t)
\end{bmatrix} \tag{7.144}
\]
输入电压\(v_{g}(t)\)为一个独立源,将其放置在输入向量\(\pmb{u}(t)\)中。我们选择不对其他独立源建模,所以将输入向量定义为:
\[\pmb{u}(t)=
\begin{bmatrix}
v_{g}(t)
\end{bmatrix} \tag{7.145}
\]
要对变换器输入端口进行建模,我们需要找到变换器的输入电流\(i_{g}(t)\)。对于Boost变换器,输入电流\(i_{g}(t)\)与电感电流\(i_{L}(t)\)是一样的。因为电感电流\(i_{L}(t)\)已经在状态向量\(\pmb{x}(t)\)中了,将\(i_{g}(t)\)再包含在输出向量中不会获得额外的信息。另一方面,要对输出端口建模,我们需要对输出电压\(v(t)\)列写方程。由于实际输出电压\(v(t)\)与电容状态电压\(v_{C}(t)\)并不一致,我们必须写出可以求解输出平均电压的附加方程。因此,\(v(t)\)必须包含在输出向量中,因此,现在将\(\pmb{y}(t)\)定义为:
\[\pmb{y}(t)=
\begin{bmatrix}
v(t)
\end{bmatrix} \tag{7.146}
\]
对于这个例子,输出向量仅包含一个受控量\(v(t)\)。
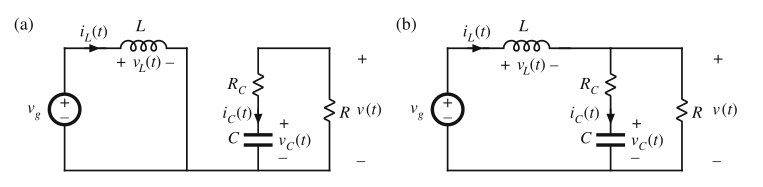
Fig. 7.49 Boost with ESR converter circuit: (a) during subinterval 1, (b) during subinterval 2
接下来,我们将对每个开关状态列写状态方程。在第一个子区间内,MOSFET导通,变换器电路简化为图7.49a。可以写出电感电压与电容电流:
\[\begin{matrix}
L \cfrac{di_{L}(t)}{dt}=v_{g}(t) \C \cfrac{dv_{C}(t)}{dt}=- \cfrac{v_{C}(t)}{R+R_{C}}
\end{matrix} \tag{7.147}
\]
需要注意的是,这里我们已经使用电容电容电压\(v_{C}(t)\)而不是输出电压\(v(t)\)来表示电容电流。这是必要的,因为状态方程必须列写为独立向量\(\pmb{x}(t)\)和\(\pmb{u}(t)\)的函数,而不是依赖于\(\pmb{y}(t)\)的函数。
对于第一个子区间,我们还可以将输出量表示为\(\pmb{x}(t)\)和\(\pmb{u}(t)\)基本元素的函数,如下所示:
\[v(t)=v_{C}(t) \cfrac{R}{R+R_{C}} \tag{7.148}
\]
同样的,我们就将\(v(t)\)表示为电容状态\(v_{C}(t)\)的函数。
接下来我们可以将式(7.147)和(7.148)表示为矩阵形式,其结果为:
\[\begin{matrix}
\begin{bmatrix}
L &0 \0 & C
\end{bmatrix}
\cfrac{d}{dt}
\begin{bmatrix}
i_{L}(t) \v_{C}(t)
\end{bmatrix}=
\begin{bmatrix}
0 & 0\0 & -\cfrac{1}{R+R_{C}}
\end{bmatrix}
\begin{bmatrix}
i_{L}(t) \v_{C}(t)
\end{bmatrix}+
\begin{bmatrix}
1\0
\end{bmatrix}
\begin{bmatrix}
v_{g}(t)
\end{bmatrix}
\\begin{bmatrix}
v(t)
\end{bmatrix}=
\begin{bmatrix}
0\\cfrac{R}{R+R_{C}}
\end{bmatrix}
\begin{bmatrix}
i_{L}(t) \v_{C}(t)
\end{bmatrix}+
\begin{bmatrix}
0
\end{bmatrix}
\begin{bmatrix}
v_{g}(t)
\end{bmatrix}
\end{matrix}
\tag{7.149}
\]
在第二个子区间内,MOSFET关断,二极管导通。此时得到了图7.49b所示的电路。此时电感电压和电容电流可表示为:
\[\begin{matrix}
L \cfrac{di_{L}(t)}{dt}=v_{g}(t)-v(t)=v_{g}(t)-v_{C}(t) \cfrac{R}{R+R_{C}}-i_{L}(t)R//R_{C}
\C \cfrac{dv_{C}(t)}{dt}= \cfrac{v(t)-v_{C}(t)}{R_{C}}=-\cfrac{v_{C}(t)}{R+R_{C}}+i(t) \cfrac{R}{R+R_{C}} \tag{7.150}
\end{matrix}
\]
由于状态方程必须列写为\(\pmb{x}(t)\)和\(\pmb{u}(t)\)的元素组成的函数,而不是\(\pmb{y}(t)\)的函数,因此我们需要将上式中的\(v(t)\)消去。其中符号\(R//R_{C}\)表示两个电阻的并联值。
对于这个子区间,我们还是可以将输出表示为\(\pmb{x}(t)\)和\(\pmb{u}(t)\)中元素的函数。如下所示:
\[v(t)=v_{C}(t) \cfrac{R}{R+R_{C}}+i_{L}(t)R//R_{C} \tag{7.151}
\]
同样的,我们将\(v(t)\)表示为了电容电压\(v_{C}(t)\)的函数。将上面两个方程组合为状态空间形式,那么第二个子区间内:
\[\begin{matrix}
\begin{bmatrix}
L &0 \0 & C
\end{bmatrix}
\cfrac{d}{dt}
\begin{bmatrix}
i_{L}(t) \v_{C}(t)
\end{bmatrix}=
\begin{bmatrix}
-R//R_{C} & -\cfrac{R}{R+R_{C}}\\cfrac{R}{R+R_{C}} & -\cfrac{1}{R+R_{C}}
\end{bmatrix}
\begin{bmatrix}
i_{L}(t) \v_{C}(t)
\end{bmatrix}+
\begin{bmatrix}
1\0
\end{bmatrix}
\begin{bmatrix}
v_{g}(t)
\end{bmatrix}
\\begin{bmatrix}
v(t)
\end{bmatrix}=
\begin{bmatrix}
R//R_{C} &
\cfrac{R}{R+R_{C}}
\end{bmatrix}
\begin{bmatrix}
i_{L}(t) \v_{C}(t)
\end{bmatrix}+
\begin{bmatrix}
0
\end{bmatrix}
\begin{bmatrix}
v_{g}(t)
\end{bmatrix}
\end{matrix} \tag{7.152}
\]
利用状态空间平均法得到的稳态模型为:
\[\begin{matrix}\begin{bmatrix}0\\0\end{bmatrix}=\begin{bmatrix}-D^{‘}(R//R_{C}) & -D^{‘}\cfrac{R}{R+R_{C}}\\D^{‘}\cfrac{R}{R+R_{C}} & -\cfrac{1}{R+R_{C}}\end{bmatrix}\begin{bmatrix}I_{L}\\V_{C}\end{bmatrix}+\begin{bmatrix}1\\0\end{bmatrix}\begin{bmatrix}V_{g}\end{bmatrix}\\\begin{bmatrix}V\end{bmatrix}=\begin{bmatrix}D^{‘}(R//R_{C}) & \cfrac{R}{R+R_{C}}\end{bmatrix}\begin{bmatrix}I_{L}\\V_{C}\end{bmatrix}+\begin{bmatrix}0\end{bmatrix}\begin{bmatrix}V_{g}\end{bmatrix}\end{matrix} \tag{7.153}
\]
下面让我们来构建上述方程的稳态等效电路。变换器输出端口是输出电压\(V\)而不是电容电压\(V_{C}\)。因此,首先需要利用输出方程消除\(V_{C}\),将上述方程表示为\(V\)的关系。这就得到了如下的方程:
\[0=V_{g}-D^{‘}V-DD^{‘}I_{L}(R//R_{C}) \tag{7.154a}
\]
\[0=D^{‘}I_{L} -\cfrac{V}{R} \tag{7.154b}
\]
\[V=V_{C} \cfrac{R}{R+R_{C}}+D^{‘}I_{L}(R//R_{C}) \tag{7.154c}
\]
可以将式(7.154a)认为是根据电感伏秒平衡得到的电压环路方程。这个环路的电流就是电感的直流电流\(I_{L}\)。该方程相应的等效电路如图7.50a所示。类似的,式(7.154b)是输出节点方程,其电压为\(V\)。其等效电路模型如图7.50b所示。式(7.154c)描述了电容\(C\)及其电压\(V_{C}\)是如何连接到输出节点的。我们期望可以像图7.47的原始变换器电路中一样,理想电容\(C\)通过ESR \(R_{C}\)连接到输出节点。确实的,在这种情况下:图7.50c就是这样对式(7.154c)这样描述的,电容电压\(V_{C}\)通过电阻\(R_{C}\)连接到输出节点。在图7.154c中,电阻\(R\)和\(R_{C}\)构成了一个分压比为\(R/(R+R_{C})\)的分压器。公式中的第二项说明了电流\(D^{‘}I_{L}\)是如何通过分压器的戴维南等效电阻\(R/(R+R_C)\)来增加输出电压的。
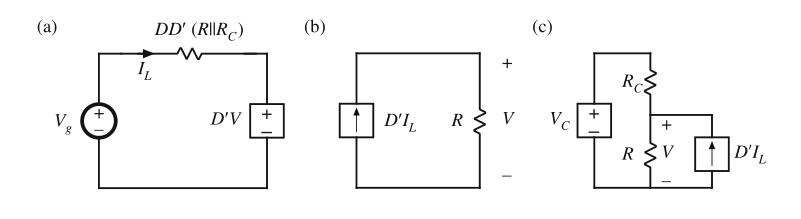
Fig. 7.50 Steps in the construction of the steady-state equivalent circuit for the boost converter with
capacitor equivalent series resistance: (a) inductor loop, (b) output node, (c) connection of capacitor to output node
图7.50的电路可以组合成图7.51的完整的稳态等效电路。可以看到,稳态下电压\(V\)与\(V_{C}\)相同。此外,电容的ESR引出了一个等效串联的附加电阻\(DD^{‘}(R//R_{C})\)。这个电阻模拟了交流电容电流在ESR中引起的损耗以及其对变换器效率的影响。
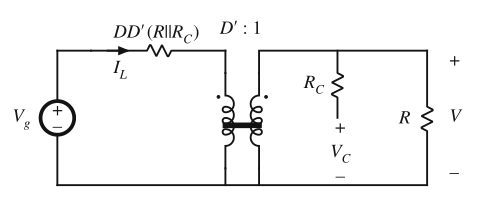
Fig. 7.51 Steady-state model of the boost converter, including effects of capacitor equivalent series resistance \(R_{C}\)
根据式(7.110),小信号交流状态空间平均模型也可以得到。其结果为:
\[\begin{matrix}
\begin{bmatrix}
L &0\0 &C
\end{bmatrix}
\cfrac{d}{dt}
\begin{bmatrix}
\hat{i}(t)\\hat{v_{C}}(t)
\end{bmatrix}=
\begin{bmatrix}
-D^{‘}(R//R_{C}) &-D^{‘} \cfrac{R}{R+R_{C}}\D^{‘} \cfrac{R}{R+R_{C}} & -\cfrac{1}{R+R_{C}}
\end{bmatrix}
\begin{bmatrix}
\hat{i}(t)\\hat{v_{C}}(t)
\end{bmatrix}+
\begin{bmatrix}
1\0
\end{bmatrix}
\begin{bmatrix}
\hat{v}_{g}(t)
\end{bmatrix} \+\begin{bmatrix}
I_{L}R//R_{C}+V_{C}\cfrac{R}{R+R_{C}}\-I_{L}\cfrac{R}{R+R_{C}}
\end{bmatrix}
\hat{d}(t)
\\begin{bmatrix}
\hat{v}(t)
\end{bmatrix}=
\begin{bmatrix}
D^{‘}(R//R_{C}) &\cfrac{R}{R+R_{C}}
\end{bmatrix}
\begin{bmatrix}
\hat{i}(t)\\hat{v_{C}}(t)
\end{bmatrix}+
\begin{bmatrix}
-I_{L}R//R_{C}
\end{bmatrix}
\hat{d}(t)
\end{matrix}
\tag{7.155-157}
\]
为了构建小信号交流电路模型,将方程表示以变换器输出电压\(\hat{v}\)来表示比电容电压\(v_{C}\)表示更加合理。这是利用输出方程从状态方程右侧将\(\hat{v}_{C}\)消除实现的。经过一些代数运算,我们得到:
\[L \cfrac{d\hat{i}_{L}}{dt}=\hat{v}_{g}-D^{‘}\hat{v}-DD^{‘}(R//R_{C})\hat{i}_{L}+((D-D^{‘})(R//R_{C})I_{L}+V)\hat{d} \tag{7.158a}
\]
\[C \cfrac{d\hat{v}_{C}}{dt}=D^{‘}\hat{i}_{L}-\cfrac{\hat{v}}{R}-I_{L}\hat{d} \tag{7.158b}
\]
\[\hat{v}=\hat{v}_{C} \cfrac{R}{R+R_{C}}+(D^{‘}\hat{i}_{L}-I_{L}\hat{d})(R//R_{C}) \tag{7.158c}
\]
式(7.158a)可以被认为是描述包含电感环路的电压小信号交流分量的电压环路方程。流过该环路的电流为交流电感电流\(\hat{i}_{L}\)。对该方程构建等效电路如图7.52a所示。类似的,式(7.158b)为电压\(\hat{v}\)的输出节点方程。相应等效电路如图7.52b。尽管电容电流\(Cd\hat{v}_{C}/dt\)从该节点流出,但式(7.158b)并未描述电容是否通过ESR连接,所以,在这个点上我们将电容支路认为是一个未知支路。
式(7.158c)描述了电容\(C\)及其电压\(\hat{v}_{C}\)是如何连接到输出节点的。与稳态模型一样,我们希望理想电容\(C\)通过ESR的\(R_{C}\)连接到输出节点。与稳态相同,图7.52c是式(7.158c)的等效电路,其电容电压\(\hat{v}_{C}\)通过电阻\(R_{C}\)连接到输出节点电压\(\hat{v}\)。如图7.52c所示,电阻\(R\)和\(R_{C}\)再次构建了分压比为\(R/(R+R_{C})\)的分压器。公式中的第二项说明了总电流\(D^{‘}i_{L}+I_{L}\hat{d}\)(变压器二次侧加上含\(\hat{d}\)电流源)是如何通过分压器的戴维南等效电阻\(R/(R+R_C)\)来增加输出电压的。图7.52b和7.52c可以组合为图7.52d所示的单个电路。
现在可以将7.52a和7.52d所示的电路组合为一个完整电路,并用一个变压器代替受控源,如图7.53所示。在这个小信号交流模型中,电压\(\hat{v}\)和\(\hat{v}_{C}\)可以不同。如果没有ESR,电容ESR导致的新传递函数将不存在。
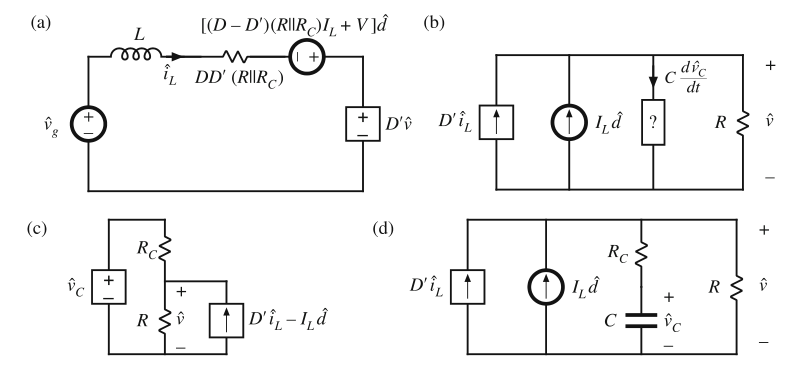
Fig. 7.52 Steps in the construction of the small-signal ac equivalent circuit for the boost converter with capacitor equivalent series resistance: (a) inductor loop, (b) output node, (c) connection of capacitor to output node, (d) composite circuit, output node and capacitor
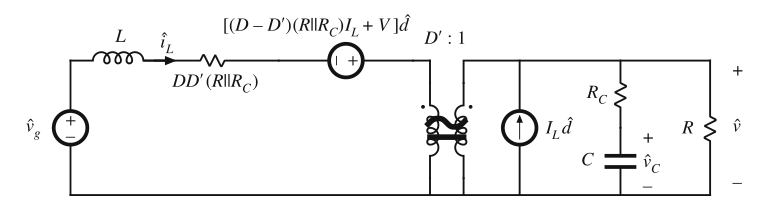
Fig. 7.53 Complete small-signal ac model of the boost converter, including effects of capacitor equivalent series resistance RC
7.6 要点小结
1.第2章和第3章的变换器分析技术可以拓展分析变换器的交流特性。其关键步骤就是在一个开关周期内对变换器波形进行平均。这就去除了变换器的开关谐波,并且直接得到了期望的波形直流和低频交流分量。特别的,这通常就可以直接找到了平均电感电压,电容电流以及变换器输入电流的表达式。
2.由于开关变换器是非线性系统,因此希望构建小信号线性化模型。而这就是通过在静态工作点附近对平均模型进行扰动和线性化来实现的。
3.可以用第3章中构建直流等效电路相同的方式构造交流等效电路。如果需要,还可以改进交流等效电路来分析变换器损耗和其他非理想因素的影响。
4.常规的脉冲宽度调制电路具有线性增益,这个增益取决于锯齿波的斜率或者其等效峰峰值。同时脉冲宽度调制还将采样过程引入了系统。
5.规范电路描述了在连续导通模式下工作的所有DC-DC PWM变换器共有的基本属性。这个模型的核心是将第3章引入的理想变比为\(1:M(D)\)的变压器来表示基本DC-DC变换比,并且在这里扩充为包含了交流变化量。变换器的无功元件将低通滤波器引入电路网络。该电路还包括了代表占空比变化引入的独立源。为方便参考,还列出了几个基本变换器的规范模型参数。
6.除了使用状态空间形式进行描述,7.5节的状态空间平均法与7.2节中的基本方法是一致的。通用的结果已经在7.5.2节中给出了。只要能写出每个子区间的状态方程,那么总能利用状态空间平均法推导出小信号平均模型。
[Fundamental of Power Electronics]-PART II-7. 交流等效电路建模-7.5 状态空间平均 7.6 本章小结
标签:根据 通过 相同 容器 int tput 输入输出 这一 gen
原文地址:https://www.cnblogs.com/swear/p/14530124.html