标签:tail source 子函数 strong 情况 函数 复制 get 前言
RTOS的分析是比较困难的,特别是任务多且涉及很多任务通信的时候,程序的稳定性就是一个比较麻烦的问题了,不过好在有很多工具可以用来分析RTOS的运行状况,常见的有SystemView、Tracealyzer,TIRTOS的分析工具ROV(运行时对象查看器)则集成在CCS中。下面以Segger的SystemView为例,如何在FreeRTOS上移植和使用SystemView。

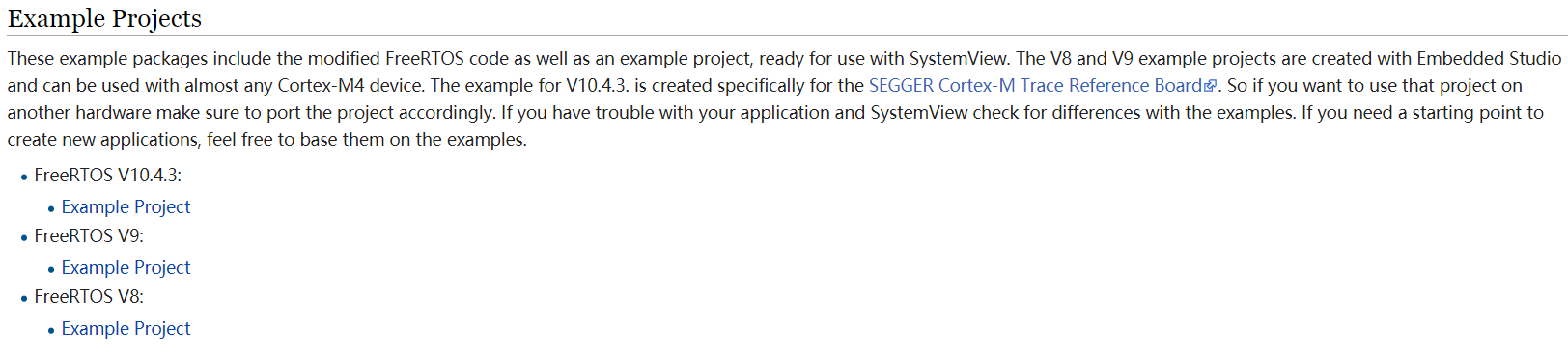

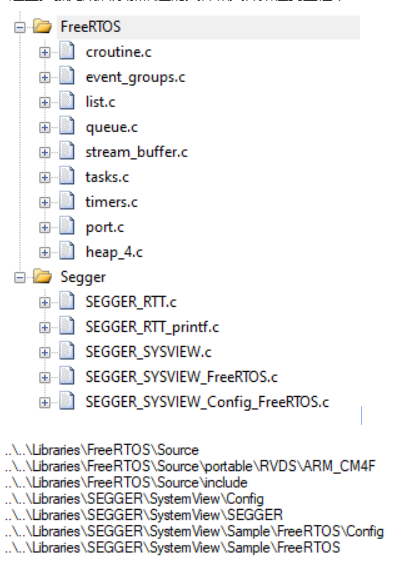
这里暂不描述从零开始打补丁的过程,而是直接使用官方提供的打好补丁的FreeRTOS源码和RTT源码。
void Led1Task()
{
while(1)
{
BspLedToggle(LED1);
vTaskDelay(100);
}
}
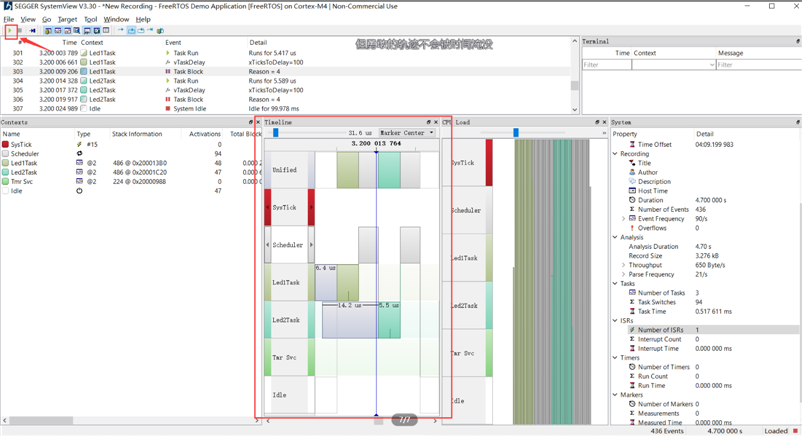
systemview使用后面再说
参考文档
https://wiki.segger.com/FreeRTOS_with_SystemView
https://blog.csdn.net/qq_29486527/article/details/88010893
https://dalegi.com/2020/01/15/setup-guide-for-segger-j-link-and-systemview-with-stm32-nucleo-boards/
标签:tail source 子函数 strong 情况 函数 复制 get 前言
原文地址:https://www.cnblogs.com/neriq/p/14728938.html