标签:http 相互 链接 一个 详细 https 变换 nsf 向量
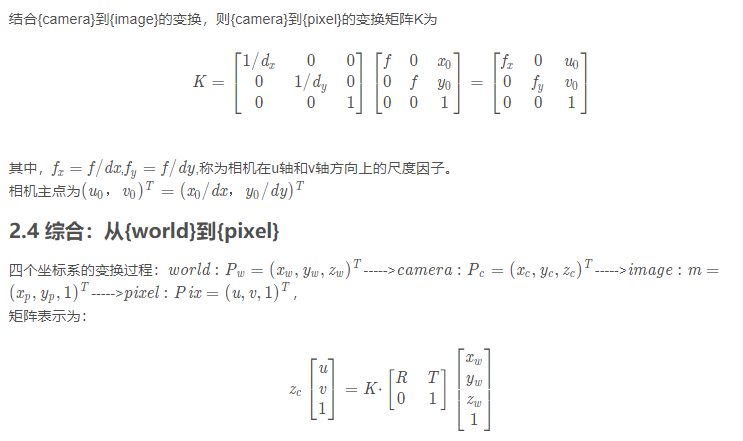
16个相机参数
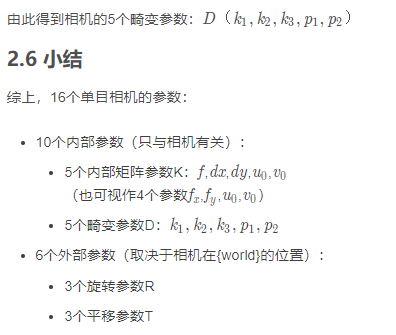
摘要:本文首先介绍了针孔相机模型,然后推导四个坐标轴变换的关系,引出R、T、K、D中包含相机的5个内参,6个外参,5个畸变参数。相机的标定是从空间点及其对应的像素点,获得相机的位置信息和内部参数信息的过程,16个相机参数的总结为此提供了模型基础。
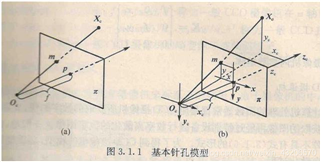
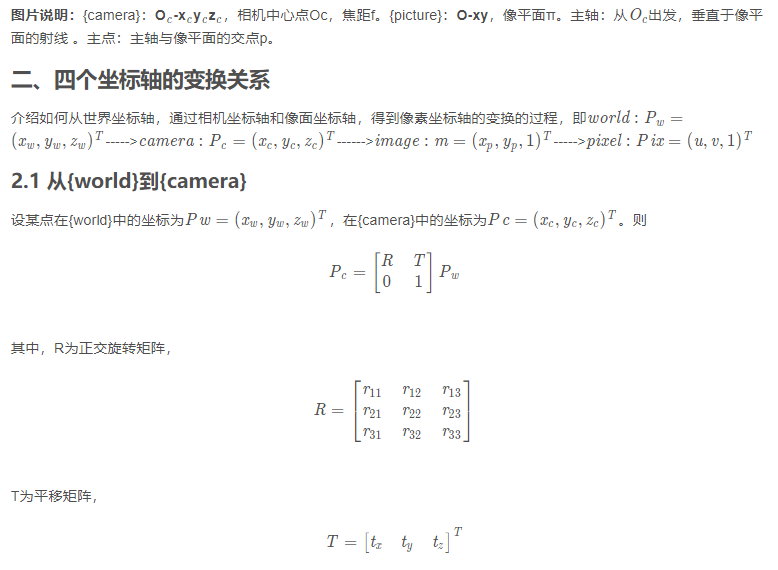
一、针孔相机模型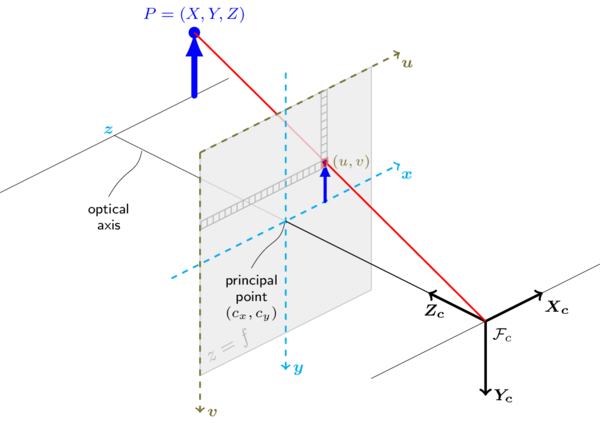

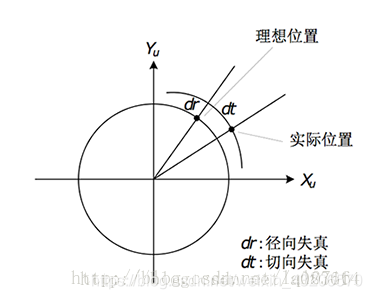
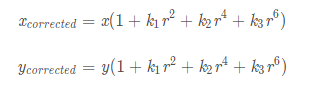
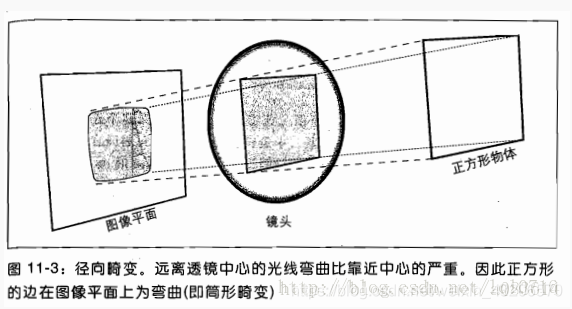
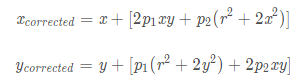
径向畸变(桶形畸变和枕形畸变)产生原因:光线在远离透镜中心的地方偏折更大。矫正公式:
切向畸变产生原因:透镜不完全平行于图像平面。矫正公式:
推导:
1.【旋转矩阵】https://www.cnblogs.com/caster99/p/4703033.html
旋转矩阵是一个完美的矩阵——正交矩阵。它的行列式为1,且每个列向量都是单位向量且相互正交,它的逆等于它的转置。
2.【平移矩阵】http://frankorz.com/2017/09/24/matrix-transformation-2/ 平移矩阵,比较平移旋转及旋转平移,说明先旋转后平移的好处
3.【反射矩阵推导】https://www.cnblogs.com/wantnon/p/5630915.html
4.【相机畸变详细推导 】https://blog.csdn.net/waeceo/article/details/51024396
5.【6个参数 旋转平移下坐标变换】https://blog.csdn.net/xuelabizp/article/details/50314633
参考:
1.https://blog.csdn.net/xuelabizp/article/details/50314633
2.https://blog.csdn.net/u010128736/article/details/52850444
3.https://www.cnblogs.com/Jessica-jie/p/6596450.html?tdsourcetag=s_pctim_aiomsg
4.https://blog.csdn.net/yangdashi888/article/details/51356385
5.https://blog.csdn.net/a083614/article/details/78579163
6.https://blog.csdn.net/lql0716/article/details/71973318?locationNum=8&fps=1)
原文链接:https://blog.csdn.net/weixin_43206570/article/details/84797361
-
标签:http 相互 链接 一个 详细 https 变换 nsf 向量
原文地址:https://www.cnblogs.com/Ph-one/p/14826328.html