标签:des style blog http io ar os 使用 sp
转载:
http://www.wowotech.net/device_model/why-dt.html
http://www.wowotech.net/device_model/dt_basic_concept.html
http://www.wowotech.net/device_model/dt-code-analysis.html
一、前言
作为一个多年耕耘在linux 2.6.23内核的开发者,各个不同项目中各种不同周边外设驱动的开发以及各种琐碎的、扯皮的俗务占据了大部分的时间。当有机会下载3.14的内核并准备 学习的时候,突然发现linux kernel对于我似乎变得非常的陌生了,各种新的机制,各种framework、各种新的概念让我感到阅读内核代码变得举步维艰。 还好,剖析内核的热情还在,剩下的就交给时间的。首先进入视线的是Device Tree机制,这是和porting内核非常相关的机制,如果想让将我们的硬件平台迁移到高版本的内核上,Device Tree是一个必须要扫清的障碍。
我想从下面三个方面来了解Device Tree:
1、为何要引入Device Tree,这个机制是用来解决什么问题的?(这是本文的主题)
2、Device Tree的基础概念(请参考DT基础概念)
3、ARM linux中和Device Tree相关的代码分析(请参考DT代码分析)
阅读linux内核代码就像欣赏冰山,有看得到的美景(各种内核机制及其代码),也有埋在水面之下看不到的基础(机制背后的源由和目的)。沉醉于各种内核 机制的代码固然有无限乐趣,但更重要的是注入更多的思考,思考其背后的机理,真正理解软件抽象。这样才能举一反三,并应用在具体的工作和生活中。
本文主要从下面几个方面阐述为何ARM linux会引入Device Tree:
1、没有Device Tree的ARM linux是如何运转的?
2、混乱的ARM architecture代码和存在的问题
3、新内核的解决之道
二、没有Device Tree的ARM linux是如何运转的?
我曾经porting内核到两个ARM-based的平台上。一个是小的芯片公司的应用处理器,公司自己购买了CPU core,该CPU core使用ARM兼容的指令集(但不是ARM)加上各种公司自行设计的多媒体外设整合成公司的产品进行销售。而我的任务就是porting 2.4.18内核到该平台上。在黑白屏幕的手机时代,那颗AP(application process)支持了彩屏、camera、JPEG硬件加速、2D/3D加速、MMC/SD卡、各种音频加速(内置DSP)等等特性,功能强大到无法直 视。另外一次移植经历是让2.6.23内核跑在一个大公司的冷门BP(baseband processor)上。具体porting的方法是很简单的:
1、自己撰写一个bootloader并传递适当的参数给kernel。除了传统的command line以及tag list之类的,最重要的是申请一个machine type,当拿到属于自己项目的machine type ID的时候,当时心情雀跃,似乎自己已经是开源社区的一份子了(其实当时是有意愿,或者说有目标是想将大家的代码并入到linux kernel main line的)。
2、在内核的arch/arm目录下建立mach-xxx目录,这个目录下,放入该SOC的相关代码,例如中断controller的代码,时间相关的代 码,内存映射,睡眠相关的代码等等。此外,最重要的是建立一个board specific文件,定义一个machine的宏:
MACHINE_START(project name, "xxx公司的xxx硬件平台")
.phys_io = 0x40000000,
.boot_params = 0xa0000100,
.io_pg_offst = (io_p2v(0x40000000) >> 18) & 0xfffc,
.map_io = xxx_map_io,
.init_irq = xxx_init_irq,
.timer = &xxx_timer,
.init_machine = xxx_init,
MACHINE_END
在xxx_init函数中,一般会加入很多的platform device。因此,伴随这个board specific文件中是大量的静态table,描述了各种硬件设备信息。
3、调通了system level的driver(timer,中断处理,clock等)以及串口terminal之后,linux kernel基本是可以起来了,后续各种driver不断的添加,直到系统软件支持所有的硬件。
综上所述,在linux kernel中支持一个SOC平台其实是非常简单的,让linux kernel在一个特定的平台上“跑”起来也是非常简单的,问题的重点是如何优雅的”跑”。
三、混乱的ARM architecture代码和存在的问题
每次正式的linux kernel release之后都会有两周的merge window,在这个窗口期间,kernel各个部分的维护者都会提交各自的patch,将自己测试稳定的代码请求并入kernel main line。每到这个时候,Linus就会比较繁忙,他需要从各个内核维护者的分支上取得最新代码并merge到自己的kernel source tree中。Tony Lindgren,内核OMAP development tree的维护者,发送了一个邮件给Linus,请求提交OMAP平台代码修改,并给出了一些细节描述:
1、简单介绍本次改动
2、关于如何解决merge conficts。有些git mergetool就可以处理,不能处理的,给出了详细介绍和解决方案
一切都很平常,也给出了足够的信息,然而,正是这个pull request引发了一场针对ARM linux的内核代码的争论。我相信Linus一定是对ARM相关的代码早就不爽了,ARM的merge工作量较大倒在其次,主要是他认为ARM很多的代 码都是垃圾,代码里面有若干愚蠢的table,而多个人在维护这个table,从而导致了冲突。因此,在处理完OMAP的pull request之后(Linus并非针对OMAP平台,只是Tony Lindgren撞在枪口上了),他发出了怒吼:
Gaah. Guys, this whole ARM thing is a f*cking pain in the ass.
负责ARM linux开发的Russell King脸上挂不住,进行了反驳:事情没有那么严重,这次的merge conficts就是OMAP和IMX/MXC之间一点协调的问题,不能抹杀整个ARM linux团队的努力。其他的各个ARM平台维护者也加入讨论:ARM平台如何复杂,如何庞大,对于arm linux code我们已经有一些思考,正在进行中……一时间,讨论的气氛有些尖锐,但总体是坦诚和友好的。
对于一件事情,不同层次的人有不同层次的思考。这次争论涉及的人包括:
1、内核维护者(CPU体系结构无关的代码)
2、维护ARM系统结构代码的人
3、维护ARM sub architecture的人(来自各个ARM SOC vendor)
维护ARM sub architecture的人并没有强烈的使命感,作为公司的一员,他们最大的目标是以最快的速度支持自己公司的SOC,尽快的占领市场。这些人的软件功 力未必强,对linux kernel的理解未必深入(有些人可能很强,但是人在江湖身不由己)。在这样的情况下,很多SOC specific的代码都是通过copy and paste,然后稍加修改代码就提交了。此外,各个ARM vendor的SOC family是一长串的CPU list,每个CPU多多少少有些不同,这时候#ifdef就充斥了各个源代码中,让ARM mach-和plat-目录下的代码有些不忍直视。
作为维护ARM体系结构的人,其能力不容置疑。以Russell King为首的team很好的维护了ARM体系结构的代码。基本上,除了mach-和plat-目录,其他的目录中的代码和目录组织是很好的。作为ARM linux的维护者,维护一个不断有新的SOC加入的CPU architecture code的确是一个挑战。在Intel X86的架构一统天下的时候,任何想正面攻击Intel的对手都败下阵来。想要击倒巨人(或者说想要和巨人并存)必须另辟蹊径。ARM的策略有两个,一个 是focus在嵌入式应用上,也就意味着要求低功耗,同时也避免了和Intel的正面对抗。另外一个就是博采众家之长,采用license IP的方式,让更多的厂商加入ARM建立的生态系统。毫无疑问,ARM公司是成功的,但是这种模式也给ARM linux的维护者带来了噩梦。越来越多的芯片厂商加入ARM阵营,越来越多的ARM platform相关的代码被加入到内核,不同厂商的周边HW block设计又各不相同……
内核维护者是真正对操作系统内核软件有深入理解的人,他们往往能站在更高的层次上去观察问题,发现问题。Linus注意到每次merge window中,ARM的代码变化大约占整个ARCH目录的60%,他认为这是一个很明显的符号,意味着ARM linux的代码可能存在问题。其实,60%这个比率的确很夸张,因为unicore32是在2.6.39 merge window中第一次全新提交,它的代码是全新的,但是其代码变化大约占整个ARCH目录的9.6%(需要提及的是unicore32是一个中国芯)。有 些维护ARM linux的人认为这是CPU市场占用率的体现,不是问题,直到内核维护者贴出实际的代码并指出问题所在。内核维护者当然想linux kernel支持更多的硬件平台,但是他们更愿意为linux kernel制定更长远的规划。例如:对于各种繁杂的ARM平台,用一个kernel image来支持。
经过争论,确定的问题如下:
1、ARM linux缺少platform(各个ARM sub architecture,或者说各个SOC)之间的协调,导致arm linux的代码有重复。值得一提的是在本次争论之前,ARM维护者已经进行了不少相关的工作(例如PM和clock tree)来抽象相同的功能模块。
2、ARM linux中大量的board specific的源代码应该踢出kernel,否则这些垃圾代码和table会影响linux kernel的长期目标。
3、各个sub architecture的维护者直接提交给Linux并入主线的机制缺乏层次。
四、新内核的解决之道
针对ARM linux的现状,最需要解决的是人员问题,也就是如何整合ARM sub architecture(各个ARM Vendor)的资源。因此,内核社区成立了一个ARM sub architecture的team,该team主要负责协调各个ARM厂商的代码(not ARM core part),Russell King继续负责ARM core part的代码。此外,建立一个ARM platform consolidation tree。ARM sub architecture team负责review各个sub architecture维护者提交的代码,并在ARM platform consolidation tree上维护。在下一个merge window到来的时候,将patch发送给Linus。
针对重复的代码问题,如果不同的SOC使用了相同的IP block(例如I2C controller),那么这个driver的code要从各个arch/arm/mach-xxx中独立出来,变成一个通用的模块供各个SOC specific的模块使用。移动到哪个目录呢?对于I2C或者USB OTG而言,这些HW block的驱动当然应该移动到kernel/drivers目录。因为,对于这些外设,可能是in-chip,也可能是off-chip的,但是对于软 件而言,它们是没有差别的(或者说好的软件抽象应该掩盖底层硬件的不同)。对于那些system level的code呢?例如clock control、interrupt control。其实这些也不是ARM-specific,应该属于linux kernel的核心代码,应该放到linux/kernel目录下,属于core-Linux-kernel frameworks。当然对于ARM平台,也需要保存一些和framework交互的code,这些code叫做ARM SoC core architecture code。OK,总结一下:
1、ARM的核心代码仍然保存在arch/arm目录下
2、ARM SoC core architecture code保存在arch/arm目录下
3、ARM SOC的周边外设模块的驱动保存在drivers目录下
4、ARM SOC的特定代码在arch/arm/mach-xxx目录下
5、ARM SOC board specific的代码被移除,由Device Tree机制来负责传递硬件拓扑和硬件资源信息。
OK,终于来到了Device Tree了。本质上,Device Tree改变了原来用hardcode方式将HW 配置信息嵌入到内核代码的方法,改用bootloader传递一个DB的形式。对于基于ARM CPU的嵌入式系统,我们习惯于针对每一个platform进行内核的编译。但是随着ARM在消费类电子上的广泛应用(甚至桌面系统、服务器系统),我们 期望ARM能够象X86那样用一个kernel image来支持多个platform。在这种情况下,如果我们认为kernel是一个black box,那么其输入参数应该包括:
1、识别platform的信息
2、runtime的配置参数
3、设备的拓扑结构以及特性
对于嵌入式系统,在系统启动阶段,bootloader会加载内核并将控制权转交给内核,此外,还需要把上述的三个参数信息传递给kernel,以便kernel可以有较大的灵活性。在linux kernel中,Device Tree的设计目标就是如此。
一、前言
一些背景知识(例如:为何要引入Device Tree,这个机制是用来解决什么问题的)请参考引入Device Tree的原因,本文主要是介绍Device Tree的基础概念。
简单的说,如果要使用Device Tree,首先用户要了解自己的硬件配置和系统运行参数,并把这些信息组织成Device Tree source file。通过DTC(Device Tree Compiler),可以将这些适合人类阅读的Device Tree source file变成适合机器处理的Device Tree binary file(有一个更好听的名字,DTB,device tree blob)。在系统启动的时候,boot program(例如:firmware、bootloader)可以将保存在flash中的DTB copy到内存(当然也可以通过其他方式,例如可以通过bootloader的交互式命令加载DTB,或者firmware可以探测到device的信 息,组织成DTB保存在内存中),并把DTB的起始地址传递给client program(例如OS kernel,bootloader或者其他特殊功能的程序)。对于计算机系统(computer system),一般是firmware->bootloader->OS,对于嵌入式系统,一般是bootloader->OS。
本文主要描述下面两个主题:
1、Device Tree source file语法介绍
2、Device Tree binaryfile格式介绍
二、Device Tree的结构
在描述Device Tree的结构之前,我们先问一个基础问题:是否Device Tree要描述系统中的所有硬件信息?答案是否定的。基本上,那些可以动态探测到的设备是不需要描述的,例如USB device。不过对于SOC上的usb host controller,它是无法动态识别的,需要在device tree中描述。同样的道理,在computer system中,PCI device可以被动态探测到,不需要在device tree中描述,但是PCI bridge如果不能被探测,那么就需要描述之。
为了了解Device Tree的结构,我们首先给出一个Device Tree的示例:
/ o device-tree
|- name = "device-tree"
|- model = "MyBoardName"
|- compatible = "MyBoardFamilyName"
|- #address-cells = <2>
|- #size-cells = <2>
|- linux,phandle = <0>
|
o cpus
| | - name = "cpus"
| | - linux,phandle = <1>
| | - #address-cells = <1>
| | - #size-cells = <0>
| |
| o PowerPC,970@0
| |- name = "PowerPC,970"
| |- device_type = "cpu"
| |- reg = <0>
| |- clock-frequency = <0x5f5e1000>
| |- 64-bit
| |- linux,phandle = <2>
|
o memory@0
| |- name = "memory"
| |- device_type = "memory"
| |- reg = <0x00000000 0x00000000 0x00000000 0x20000000>
| |- linux,phandle = <3>
|
o chosen
|- name = "chosen"
|- bootargs = "root=/dev/sda2"
|- linux,phandle = <4>
从上图中可以看出,device tree的基本单元是node。这些node被组织成树状结构,除了root node,每个node都只有一个parent。一个device tree文件中只能有一个root node。每个node中包含了若干的property/value来描述该node的一些特性。每个node用节点名字(node name)标识,节点名字的格式是node-name@unit-address。 如果该node没有reg属性(后面会描述这个property),那么该节点名字中必须不能包括@和unit-address。unit- address的具体格式是和设备挂在那个bus上相关。例如对于cpu,其unit-address就是从0开始编址,以此加一。而具体的设备,例如以 太网控制器,其unit-address就是寄存器地址。root node的node name是确定的,必须是“/”。
在一个树状结构的device tree中,如何引用一个node呢?要想唯一指定一个node必须使用full path,例如/node-name-1/node-name-2/node-name-N。在上面的例子中,cpu node我们可以通过/cpus/PowerPC,970@0访问。
属性(property)值标识了设备的特性,它的值(value)是多种多样的:
1、可能是空,也就是没有值的定义。例如上图中的64-bit ,这个属性没有赋值。
2、可能是一个u32、u64的数值(值得一提的是cell这个术语,在Device Tree表示32bit的信息单位)。例如#address-cells = <1> 。当然,可能是一个数组。例如<0x00000000 0x00000000 0x00000000 0x20000000>
4、可能是一个字符串。例如device_type = "memory" ,当然也可能是一个string list。例如"PowerPC,970"
三、Device Tree source file语法介绍
了解了基本的device tree的结构后,我们总要把这些结构体现在device tree source code上来。在linux kernel中,扩展名是dts的文件就是描述硬件信息的device tree source file,在dts文件中,一个node被定义成:
[label:] node-name[@unit-address] {
[properties definitions]
[child nodes]
}
“[]”表示option,因此可以定义一个只有node name的空节点。label方便在dts文件中引用,具体后面会描述。child node的格式和node是完全一样的,因此,一个dts文件中就是若干嵌套组成的node,property以及child note、child note property描述。
考虑到空泛的谈比较枯燥,我们用实例来讲解Device Tree Source file 的数据格式。假设蜗窝科技制作了一个S3C2416的开发板,我们把该development board命名为snail,那么需要撰写一个s3c2416-snail.dts的文件。如果把所有的开发板的硬件信息(SOC以及外设)都描述在一个 文件中是不合理的,因此有可能其他公司也使用S3C2416搭建自己的开发板并命令pig、cow什么的,如果大家都用自己的dts文件描述硬件,那么其 中大部分是重复的,因此我们把和S3C2416相关的硬件描述保存成一个单独的dts文件可以供使用S3C2416的target board来引用并将文件的扩展名变成dtsi(i表示include)。同理,三星公司的S3C24xx系列是一个SOC family,这些SOCs(2410、2416、2450等)也有相同的内容,因此同样的道理,我们可以将公共部分抽取出来,变成 s3c24xx.dtsi,方便大家include。同样的道理,各家ARM vendor也会共用一些硬件定义信息,这个文件就是skeleton.dtsi。我们自下而上(类似C++中的从基类到顶层的派生类)逐个进行分析。
1、skeleton.dtsi。位于linux-3.14\arch\arm\boot\dts目录下,具体该文件的内容如下:
/ {
#address-cells = <1>;
#size-cells = <1>;
chosen { };
aliases { };
memory { device_type = "memory"; reg = <0 0>; };
};
device tree顾名思义是一个树状的结构,既然是树,必然有根。“/”是根节点的node name。“{”和“}”之间的内容是该节点的具体的定义,其内容包括各种属性的定义以及child node的定义。chosen、aliases和memory都是sub node,sub node的结构和root node是完全一样的,因此,sub node也有自己的属性和它自己的sub node,最终形成了一个树状的device tree。属性的定义采用property = value的形式。例如#address-cells和#size-cells就是property,而<1>就是value。value有 三种情况:
1)属性值是text string或者string list,用双引号表示。例如device_type = "memory"
2)属性值是32bit unsigned integers,用尖括号表示。例如#size-cells = <1>
3)属性值是binary data,用方括号表示。例如binary-property = [0x01 0x23 0x45 0x67]
如果一个device node中包含了有寻址需求(要定义reg property)的sub node(后文也许会用child node,和sub node是一样的意思),那么就必须要定义这两个属性。“#”是number的意思,#address-cells这个属性是用来描述sub node中的reg属性的地址域特性的,也就是说需要用多少个u32的cell来描述该地址域。同理可以推断#size-cells的含义,下面对reg 的描述中会给出更详细的信息。
chosen node主要用来描述由系统firmware指定的runtime parameter。如果存在chosen这个node,其parent node必须是名字是“/”的根节点。原来通过tag list传递的一些linux kernel的运行时参数可以通过Device Tree传递。例如command line可以通过bootargs这个property这个属性传递;initrd的开始地址也可以通过linux,initrd-start这个 property这个属性传递。在本例中,chosen节点是空的,在实际中,建议增加一个bootargs的属性,例如:
"root=/dev/nfs nfsroot=1.1.1.1:/nfsboot ip=1.1.1.2:1.1.1.1:1.1.1.1:255.255.255.0::usbd0:off console=ttyS0,115200 mem=64M@0x30000000"
通过该command line可以控制内核从usbnet启动,当然,具体项目要相应修改command line以便适应不同的需求。我们知道,device tree用于HW platform识别,runtime parameter传递以及硬件设备描述。chosen节点并没有描述任何硬件设备节点的信息,它只是传递了runtime parameter。
aliases 节点定义了一些别名。为何要定义这个node呢?因为Device tree是树状结构,当要引用一个node的时候要指明相对于root node的full path,例如/node-name-1/node-name-2/node-name-N。如果多次引用,每次都要写这么复杂的字符串多少是有些麻烦, 因此可以在aliases 节点定义一些设备节点full path的缩写。skeleton.dtsi中没有定义aliases,下面的section中会进一步用具体的例子描述之。
memory device node是所有设备树文件的必备节点,它定义了系统物理内存的layout。device_type属性定义了该node的设备类型,例如cpu、 serial等。对于memory node,其device_type必须等于memory。reg属性定义了访问该device node的地址信息,该属性的值被解析成任意长度的(address,size)数组,具体用多长的数据来表示address和size是在其 parent node中定义(#address-cells和#size-cells)。对于device node,reg描述了memory-mapped IO register的offset和length。对于memory node,定义了该memory的起始地址和长度。
本例中的物理内存的布局并没有通过memory node传递,其实我们可以使用command line传递,我们command line中的参数“mem=64M@0x30000000”已经给出了具体的信息。我们用另外一个例子来加深对本节描述的各个属性以及memory node的理解。假设我们的系统是64bit的,physical memory分成两段,定义如下:
RAM: starting address 0x0, length 0x80000000 (2GB)
RAM: starting address 0x100000000, length 0x100000000 (4GB)
对于这样的系统,我们可以将root node中的#address-cells和#size-cells这两个属性值设定为2,可以用下面两种方法来描述物理内存:
方法1:
memory@0 {
device_type = "memory";
reg = <0x000000000 0x00000000 0x00000000 0x80000000
0x000000001 0x00000000 0x00000001 0x00000000>;
};方法2:
memory@0 {
device_type = "memory";
reg = <0x000000000 0x00000000 0x00000000 0x80000000>;
};memory@100000000 {
device_type = "memory";
reg = <0x000000001 0x00000000 0x00000001 0x00000000>;
};
2、s3c24xx.dtsi。位于linux-3.14\arch\arm\boot\dts目录下,具体该文件的内容如下(有些内容省略了,领会精神即可,不需要描述每一个硬件定义的细节):
#include "skeleton.dtsi"
/ {
compatible = "samsung,s3c24xx"; -------------------(A)
interrupt-parent = <&intc>; ----------------------(B)aliases {
pinctrl0 = &pinctrl_0; ------------------------(C)
};intc:interrupt-controller@4a000000 { ------------------(D)
compatible = "samsung,s3c2410-irq";
reg = <0x4a000000 0x100>;
interrupt-controller;
#interrupt-cells = <4>;
};serial@50000000 { ----------------------(E)
compatible = "samsung,s3c2410-uart";
reg = <0x50000000 0x4000>;
interrupts = <1 0 4 28>, <1 1 4 28>;
status = "disabled";
};pinctrl_0: pinctrl@56000000 {------------------(F)
reg = <0x56000000 0x1000>;wakeup-interrupt-controller {
compatible = "samsung,s3c2410-wakeup-eint";
interrupts = <0 0 0 3>,
<0 0 1 3>,
<0 0 2 3>,
<0 0 3 3>,
<0 0 4 4>,
<0 0 5 4>;
};
};……
};
这个文件描述了三星公司的S3C24xx系列SOC family共同的硬件block信息。首先提出的问题就是:为何定义了两个根节点?按理说Device Tree只能有一个根节点,所有其他的节点都是派生于根节点的。我的猜测是这样的:Device Tree Compiler会对DTS的node进行合并,最终生成的DTB只有一个root node。OK,我们下面开始逐一分析:
(A)在描述compatible属性之前要先描述model属性。model属性指明了该设备属于哪个设备生产商的哪一个model。一般而言,我们会 给model赋值“manufacturer,model”。例如model = "samsung,s3c24xx"。samsung是生产商,s3c24xx是model类型,指明了具体的是哪一个系列的SOC。OK,现在我们回到 compatible属性,该属性的值是string list,定义了一系列的modle(每个string是一个model)。这些字符串列表被操作系统用来选择用哪一个driver来驱动该设备。假设定 义该属性:compatible = “aaaaaa”, “bbbbb"。那么操作操作系统可能首先使用aaaaaa来匹配适合的driver,如果没有匹配到,那么使用字符串bbbbb来继续寻找适合的 driver,对于本例,compatible = "samsung,s3c24xx",这里只定义了一个modle而不是一个list。对于root node,compatible属性是用来匹配machine type的(在device tree代码分析文章中会给出更细致的描述)。对于普通的HW block的节点,例如interrupt-controller,compatible属性是用来匹配适合的driver的。
(B)具体各个HW block的interrupt source是如何物理的连接到interruptcontroller的呢?在dts文件中是用interrupt-parent这个属性来标识的。且 慢,这里定义interrupt-parent属性的是root node,难道root node会产生中断到interrupt controller吗?当然不会,只不过如果一个能够产生中断的device node没有定义interrupt-parent的话,其interrupt-parent属性就是跟随parent node。因此,与其在所有的下游设备中定义interrupt-parent,不如统一在root node中定义了。
intc是一个lable,标识了一个device node(在本例中是标识了interrupt-controller@4a000000 这个device node)。实际上,interrupt-parent属性值应该是是一个u32的整数值(这个整数值在Device Tree的范围内唯一识别了一个device node,也就是phandle),不过,在dts文件中中,可以使用类似c语言的Labels and References机制。定义一个lable,唯一标识一个node或者property,后续可以使用&来引用这个lable。DTC会将 lable转换成u32的整数值放入到DTB中,用户层面就不再关心具体转换的整数值了。
关于interrupt,我们值得进一步描述。在Device Tree中,有一个概念叫做interrupt tree,也就是说interrupt也是一个树状结构。我们以下图为例(该图来自Power_ePAPR_APPROVED_v1.1):
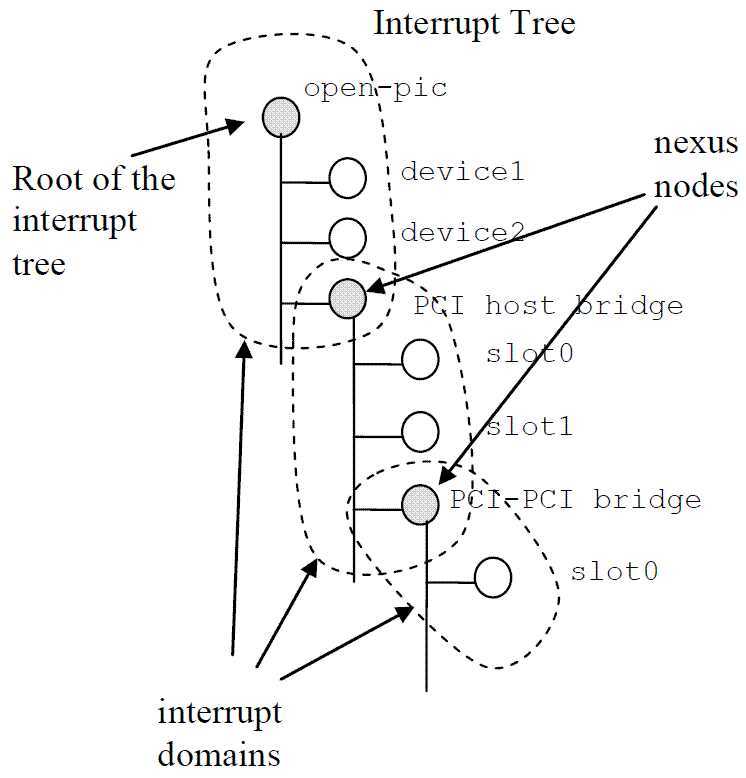
系统中有一个interrrupt tree的根节点,device1、device2以及PCI host bridge的interrupt line都是连接到root interrupt controller的。PCI host bridge设备中有一些下游的设备,也会产生中断,但是他们的中断都是连接到PCI host bridge上的interrupt controller(术语叫做interrupt nexus),然后报告到root interrupt controller的。每个能产生中断的设备都可以产生一个或者多个interrupt,每个interrupt source(另外一个术语叫做interrupt specifier,描述了interrupt source的信息)都是限定在其所属的interrupt domain中。
在了解了上述的概念后,我们可以回头再看看interrupt-parent这个属性。其实这个属性是建立interrupt tree的关键属性。它指明了设备树中的各个device node如何路由interrupt event。另外,需要提醒的是interrupt controller也是可以级联的,上图中没有表示出来。那么在这种情况下如何定义interrupt tree的root呢?那个没有定义interrupt-parent的interrupt controller就是root。
(C)pinctrl0是一个缩写,他是/pinctrl@56000000的别名。这里同样也是使用了Labels and References机制。
(D)intc(node name是interrupt-controller@4a000000 ,我这里直接使用lable)是描述interrupt controller的device node。根据S3C24xx的datasheet,我们知道interrupt controller的寄存器地址从0x4a000000开始,长度为0x100(实际2451的interrupt的寄存器地址空间没有那么 长,0x4a000074是最后一个寄存器),也就是reg属性定义的内容。interrupt-controller属性为空,只是用来标识该node 是一个interrupt controller而不是interrupt nexus(interrupt nexus需要在不同的interrupt domains之间进行翻译,需要定义interrupt-map的属性,本文不涉及这部分的内容)。#interrupt-cells 和#address-cells概念是类似的,也就是说,用多少个u32来标识一个interrupt source。我们可以看到,在具体HW block的interrupt定义中都是用了4个u32来表示,例如串口的中断是这样定义的:
interrupts = <1 0 4 28>, <1 1 4 28>;
(E) 从reg属性可以serial controller寄存器地址从0x50000000 开始,长度为0x4000。对于一个能产生中断的设备,必须定义interrupts这个属性。也可以定义interrupt-parent这个属性,如 果不定义,则继承其parent node的interrupt-parent属性。 对于interrupt属性值,各个interrupt controller定义是不一样的,有的用3个u32表示,有的用4个。具体上面的各个数字的解释权归相关的interrupt controller所有。对于中断属性的具体值的描述我们会在device tree的第三份文档-代码分析中描述。
(F)这个node是描述GPIO控制的。这个节点定义了一个wakeup-interrupt-controller 的子节点,用来描述有唤醒功能的中断源。
3、s3c2416.dtsi。位于linux-3.14\arch\arm\boot\dts目录下,具体该文件的内容如下(有些内容省略了,领会精神即可,不需要描述每一个硬件定义的细节):
#include "s3c24xx.dtsi"
#include "s3c2416-pinctrl.dtsi"/ {
model = "Samsung S3C2416 SoC";
compatible = "samsung,s3c2416"; ---------------Acpus { ----------------------------B
#address-cells = <1>;
#size-cells = <0>;cpu {
compatible = "arm,arm926ejs";
};
};interrupt-controller@4a000000 { -----------------C
compatible = "samsung,s3c2416-irq";
};……
};
(A)在s3c24xx.dtsi文件中已经定义了compatible这个属性,在s3c2416.dtsi中重复定义了这个属性,一个node不可能 有相同名字的属性,具体如何处理就交给DTC了。经过反编译,可以看出,DTC是丢弃掉了前一个定义。因此,到目前为止,compatible = samsung,s3c2416。在s3c24xx.dtsi文件中定义了compatible的属性值被覆盖了。
(B)对于根节点,必须有一个cpus的child node来描述系统中的CPU信息。对于CPU的编址我们用一个u32整数就可以描述了,因此,对于cpus node,#address-cells 是1,而#size-cells是0。其实CPU的node可以定义很多属性,例如TLB,cache、频率信息什么的,不过对于ARM,这里只是定义了 compatible属性就OK了,arm926ejs包括了所有的processor相关的信息。
(C)s3c24xx.dtsi文件和s3c2416.dtsi中都有interrupt-controller@4a000000这个node,DTC会对这两个node进行合并,最终编译的结果如下:
interrupt-controller@4a000000 {
compatible = "samsung,s3c2416-irq";
reg = <0x4a000000 0x100>;
interrupt-controller;
#interrupt-cells = <0x4>;
linux,phandle = <0x1>;
phandle = <0x1>;
};
4、s3c2416-pinctrl.dtsi
这个文件定义了pinctrl@56000000 这个节点的若干child node,主要用来描述GPIO的bank信息。
5、s3c2416-snail.dts
这个文件应该定义一些SOC之外的peripherals的定义。
四、Device Tree binary格式
1、DTB整体结构
经过Device Tree Compiler编译,Device Tree source file变成了Device Tree Blob(又称作flattened device tree)的格式。Device Tree Blob的数据组织如下图所示:
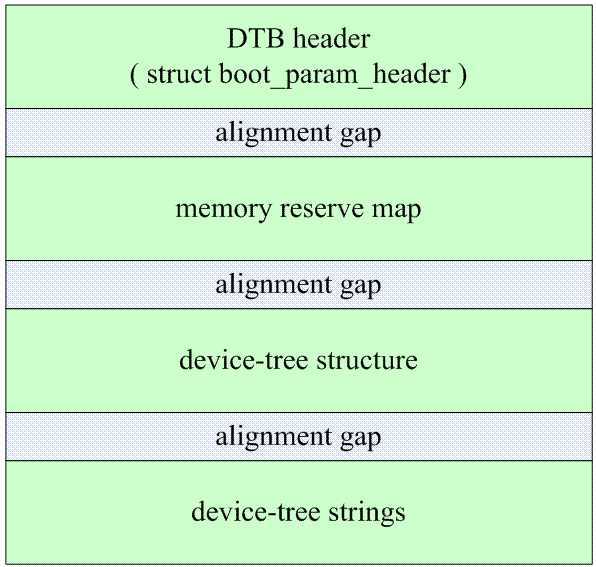
2、DTB header。
对于DTB header,其各个成员解释如下:
| header field name | description |
| magic | 用来识别DTB的。通过这个magic,kernel可以确定bootloader传递的参数block是一个DTB还是tag list。 |
| totalsize | DTB的total size |
| off_dt_struct | device tree structure block的offset |
| off_dt_strings | device tree strings block的offset |
| off_mem_rsvmap | offset to memory reserve map。有些系统,我们也许会保留一些memory有特殊用途(例如DTB或者initrd image),或者在有些DSP+ARM的SOC platform上,有写memory被保留用于ARM和DSP进行信息交互。这些保留内存不会进入内存管理系统。 |
| version | 该DTB的版本。 |
| last_comp_version | 兼容版本信息 |
| boot_cpuid_phys | 我们在哪一个CPU(用ID标识)上booting |
| dt_strings_size | device tree strings block的size。和off_dt_strings一起确定了strings block在内存中的位置 |
| dt_struct_size | device tree structure block的size。和和off_dt_struct一起确定了device tree structure block在内存中的位置 |
3、 memory reserve map的格式描述
这个区域包括了若干的reserve memory描述符。每个reserve memory描述符是由address和size组成。其中address和size都是用U64来描述。
4、device tree structure block的格式描述
device tree structure block区域是由若干的分片组成,每个分片开始位置都是保存了token,以此来描述该分片的属性和内容。共计有5种token:
(1)FDT_BEGIN_NODE (0x00000001)。该token描述了一个node的开始位置,紧挨着该token的就是node name(包括unit address)
(2)FDT_END_NODE (0x00000002)。该token描述了一个node的结束位置。
(3)FDT_PROP (0x00000003)。该token描述了一个property的开始位置,该token之后是两个u32的数据,分别是length和name offset。length表示该property value data的size。name offset表示该属性字符串在device tree strings block的偏移值。length和name offset之后就是长度为length具体的属性值数据。
(4)FDT_NOP (0x00000004)。
(5)FDT_END (0x00000009)。该token标识了一个DTB的结束位置。
一个可能的DTB的结构如下:
(1)若干个FDT_NOP(可选)
(2)FDT_BEGIN_NODE
node name
paddings
(3)若干属性定义。
(4)若干子节点定义。
(5)若干个FDT_NOP(可选)
(6)FDT_END
5、device tree strings bloc的格式描述
device tree strings bloc定义了各个node中使用的属性的字符串表。由于很多属性会出现在多个node中,因此,所有的属性字符串组成了一个string block。这样可以压缩DTB的size。
一、前言
Device Tree总共有三篇,分别是:
1、为何要引入Device Tree,这个机制是用来解决什么问题的?(请参考引入Device Tree的原因)
2、Device Tree的基础概念(请参考DT基础概念)
3、ARM linux中和Device Tree相关的代码分析(这是本文的主题)
本文主要内容是:以Device Tree相关的数据流分析为索引,对ARM linux kernel的代码进行解析。主要的数据流包括:
1、初始化流程。也就是扫描dtb并将其转换成Device Tree Structure。
2、传递运行时参数传递以及platform的识别流程分析
3、如何将Device Tree Structure并入linux kernel的设备驱动模型。
注:本文中的linux kernel使用的是3.14版本。
二、如何通过Device Tree完成运行时参数传递以及platform的识别功能?
1、汇编部分的代码分析
linux/arch/arm/kernel/head.S文件定义了bootloader和kernel的参数传递要求:
MMU = off, D-cache = off, I-cache = dont care, r0 = 0, r1 = machine nr, r2 = atags or dtb pointer.
目 前的kernel支持旧的tag list的方式,同时也支持device tree的方式。r2可能是device tree binary file的指针(bootloader要传递给内核之前要copy到memory中),也可以能是tag list的指针。在ARM的汇编部分的启动代码中(主要是head.S和head-common.S),machine type ID和指向DTB或者atags的指针被保存在变量__machine_arch_type和__atags_pointer中,这么做是为了后续c代码 进行处理。
2、和device tree相关的setup_arch代码分析
具体的c代码都是在setup_arch中处理,这个函数是一个总的入口点。具体代码如下(删除了部分无关代码):
void __init setup_arch(char **cmdline_p)
{
const struct machine_desc *mdesc;……
mdesc = setup_machine_fdt(__atags_pointer);
if (!mdesc)
mdesc = setup_machine_tags(__atags_pointer, __machine_arch_type);
machine_desc = mdesc;
machine_name = mdesc->name;……
}
对 于如何确定HW platform这个问题,旧的方法是静态定义若干的machine描述符(struct machine_desc ),在启动过程中,通过machine type ID作为索引,在这些静态定义的machine描述符中扫描,找到那个ID匹配的描述符。在新的内核中,首先使用setup_machine_fdt来 setup machine描述符,如果返回NULL,才使用传统的方法setup_machine_tags来setup machine描述符。传统的方法需要给出__machine_arch_type(bootloader通过r1寄存器传递给kernel的)和tag list的地址(用来进行tag parse)。__machine_arch_type用来寻找machine描述符;tag list用于运行时参数的传递。随着内核的不断发展,相信有一天linux kernel会完全抛弃tag list的机制。
3、匹配platform(machine描述符)
setup_machine_fdt函数的功能就是根据Device Tree的信息,找到最适合的machine描述符。具体代码如下:
const struct machine_desc * __init setup_machine_fdt(unsigned int dt_phys)
{
const struct machine_desc *mdesc, *mdesc_best = NULL;if (!dt_phys || !early_init_dt_scan(phys_to_virt(dt_phys)))
return NULL;mdesc = of_flat_dt_match_machine(mdesc_best, arch_get_next_mach);
if (!mdesc) {
出错处理
}/* Change machine number to match the mdesc we‘re using */
__machine_arch_type = mdesc->nr;return mdesc;
}
early_init_dt_scan函数有两个功能,一个是为后续的DTB scan进行准备工作,另外一个是运行时参数传递。具体请参考下面一个section的描述。
of_flat_dt_match_machine 是在machine描述符的列表中scan,找到最合适的那个machine描述符。我们首先看如何组成machine描述符的列表。和传统的方法类似, 也是静态定义的。DT_MACHINE_START和MACHINE_END用来定义一个machine描述符。编译的时候,compiler会把这些 machine descriptor放到一个特殊的段中(.arch.info.init),形成machine描述符的列表。machine描述符用下面的数据结构来 标识(删除了不相关的member):
struct machine_desc {
unsigned int nr; /* architecture number */
const char *const *dt_compat; /* array of device tree ‘compatible‘ strings */……
};
nr 成员就是过去使用的machine type ID。内核machine描述符的table有若干个entry,每个都有自己的ID。bootloader传递了machine type ID,指明使用哪一个machine描述符。目前匹配machine描述符使用compatible strings,也就是dt_compat成员,这是一个string list,定义了这个machine所支持的列表。在扫描machine描述符列表的时候需要不断的获取下一个machine描述符的 compatible字符串的信息,具体的代码如下:
static const void * __init arch_get_next_mach(const char *const **match)
{
static const struct machine_desc *mdesc = __arch_info_begin;
const struct machine_desc *m = mdesc;if (m >= __arch_info_end)
return NULL;mdesc++;
*match = m->dt_compat;
return m;
}
__arch_info_begin 指向machine描述符列表第一个entry。通过mdesc++不断的移动machine描述符指针(Note:mdesc是static的)。 match返回了该machine描述符的compatible string list。具体匹配的算法倒是很简单,就是比较字符串而已,一个是root node的compatible字符串列表,一个是machine描述符的compatible字符串列表,得分最低的(最匹配的)就是我们最终选定的 machine type。
4、运行时参数传递
运行时参数是在扫描DTB的chosen node时候完成的,具体的动作就是获取chosen node的bootargs、initrd等属性的value,并将其保存在全局变量(boot_command_line,initrd_start、 initrd_end)中。使用tag list方法是类似的,通过分析tag list,获取相关信息,保存在同样的全局变量中。具体代码位于early_init_dt_scan函数中:
bool __init early_init_dt_scan(void *params)
{
if (!params)
return false;/* 全局变量initial_boot_params指向了DTB的header*/
initial_boot_params = params;/* 检查DTB的magic,确认是一个有效的DTB */
if (be32_to_cpu(initial_boot_params->magic) != OF_DT_HEADER) {
initial_boot_params = NULL;
return false;
}/* 扫描 /chosen node,保存运行时参数(bootargs)到boot_command_line,此外,还处理initrd相关的property,并保存在initrd_start和initrd_end这两个全局变量中 */
of_scan_flat_dt(early_init_dt_scan_chosen, boot_command_line);/* 扫描根节点,获取 {size,address}-cells信息,并保存在dt_root_size_cells和dt_root_addr_cells全局变量中 */
of_scan_flat_dt(early_init_dt_scan_root, NULL);/* 扫描DTB中的memory node,并把相关信息保存在meminfo中,全局变量meminfo保存了系统内存相关的信息。*/
of_scan_flat_dt(early_init_dt_scan_memory, NULL);return true;
}
设定meminfo(该全局变量确定了物理内存的布局)有若干种途径:
1、通过tag list(tag是ATAG_MEM)传递memory bank的信息。
2、通过command line(可以用tag list,也可以通过DTB)传递memory bank的信息。
3、通过DTB的memory node传递memory bank的信息。
目前当然是推荐使用Device Tree的方式来传递物理内存布局信息。
三、初始化流程
在系统初始化的过程中,我们需要将DTB转换成节点是device_node的树状结构,以便后续方便操作。具体的代码位于setup_arch->unflatten_device_tree中。
void __init unflatten_device_tree(void)
{
__unflatten_device_tree(initial_boot_params, &of_allnodes,
early_init_dt_alloc_memory_arch);/* Get pointer to "/chosen" and "/aliases" nodes for use everywhere */
of_alias_scan(early_init_dt_alloc_memory_arch);
}
我们用struct device_node 来抽象设备树中的一个节点,具体解释如下:
struct device_node {
const char *name;----------------------device node name
const char *type;-----------------------对应device_type的属性
phandle phandle;-----------------------对应该节点的phandle属性
const char *full_name; ----------------从“/”开始的,表示该node的full pathstruct property *properties;-------------该节点的属性列表
struct property *deadprops; ----------如果需要删除某些属性,kernel并非真的删除,而是挂入到deadprops的列表
struct device_node *parent;------parent、child以及sibling将所有的device node连接起来
struct device_node *child;
struct device_node *sibling;
struct device_node *next; --------通过该指针可以获取相同类型的下一个node
struct device_node *allnext;-------通过该指针可以获取node global list下一个node
struct proc_dir_entry *pde;--------开放到userspace的proc接口信息
struct kref kref;-------------该node的reference count
unsigned long _flags;
void *data;
};
unflatten_device_tree函数的主要功能就是扫描DTB,将device node被组织成:
1、global list。全局变量struct device_node *of_allnodes就是指向设备树的global list
2、tree。
这些功能主要是在__unflatten_device_tree函数中实现,具体代码如下(去掉一些无关紧要的代码):
static void __unflatten_device_tree(struct boot_param_header *blob,---需要扫描的DTB
struct device_node **mynodes,---------global list指针
void * (*dt_alloc)(u64 size, u64 align))------内存分配函数
{
unsigned long size;
void *start, *mem;
struct device_node **allnextp = mynodes;此处删除了health check代码,例如检查DTB header的magic,确认blob的确指向一个DTB。
/* scan过程分成两轮,第一轮主要是确定device-tree structure的长度,保存在size变量中 */
start = ((void *)blob) + be32_to_cpu(blob->off_dt_struct);
size = (unsigned long)unflatten_dt_node(blob, 0, &start, NULL, NULL, 0);
size = ALIGN(size, 4);/* 初始化的时候,并不是扫描到一个node或者property就分配相应的内存,实际上内核是一次性的分配了一大片内存,这些内存包括了所有的 struct device_node、node name、struct property所需要的内存。*/
mem = dt_alloc(size + 4, __alignof__(struct device_node));
memset(mem, 0, size);*(__be32 *)(mem + size) = cpu_to_be32(0xdeadbeef); //用来检验后面unflattening是否溢出
/* 这是第二轮的scan,第一次scan是为了得到保存所有node和property所需要的内存size,第二次就是实打实的要构建device node tree了 */
start = ((void *)blob) + be32_to_cpu(blob->off_dt_struct);
unflatten_dt_node(blob, mem, &start, NULL, &allnextp, 0);
此处略去校验溢出和校验OF_DT_END。
}
具体的scan是在unflatten_dt_node函数中,如果已经清楚地了解DTB的结构,其实代码很简单,这里就不再细述了。
四、如何并入linux kernel的设备驱动模型
在linux kernel引入统一设备模型之后,bus、driver和device形成了设备模型中的铁三角。在驱动初始化的时候会将代表该driver的一个数据 结构(一般是xxx_driver)挂入bus上的driver链表。device挂入链表分成两种情况,一种是即插即用类型的bus,在插入一个设备 后,总线可以检测到这个行为并动态分配一个device数据结构(一般是xxx_device,例如usb_device),之后,将该数据结构挂入 bus上的device链表。bus上挂满了driver和device,那么如何让device遇到“对”的那个driver呢?那么就要靠缘分了,也 就是bus的match函数。
上面是一段导论,我们还是回到Device Tree。导致Device Tree的引入ARM体系结构的代码其中一个最重要的原因的太多的静态定义的表格。例如:一般代码中会定义一个static struct platform_device *xxx_devices的静态数组,在初始化的时候调用platform_add_devices。这些静态定义的platform_device往往 又需要静态定义各种resource,这导致静态表格进一步增大。如果ARM linux中不再定义这些表格,那么一定需要一个转换的过程,也就是说,系统应该会根据Device tree来动态的增加系统中的platform_device。当然,这个过程并非只是发生在platform bus上(具体可以参考“Platform Device”的设备), 也可能发生在其他的非即插即用的bus上,例如AMBA总线、PCI总线。一言以蔽之,如果要并入linux kernel的设备驱动模型,那么就需要根据device_node的树状结构(root是of_allnodes)将一个个的device node挂入到相应的总线device链表中。只要做到这一点,总线机制就会安排device和driver的约会。
当然,也不是所有的device node都会挂入bus上的设备链表,比如cpus node,memory node,choose node等。
1、cpus node的处理
这部分的处理可以参考setup_arch->arm_dt_init_cpu_maps中的代码,具体的代码如下:
void __init arm_dt_init_cpu_maps(void)
{
scan device node global list,寻找full path是“/cpus”的那个device node。cpus这个device node只是一个容器,其中包括了各个cpu node的定义以及所有cpu node共享的property。
cpus = of_find_node_by_path("/cpus");
for_each_child_of_node(cpus, cpu) { 遍历cpus的所有的child node
u32 hwid;if (of_node_cmp(cpu->type, "cpu")) 我们只关心那些device_type是cpu的node
continue;
if (of_property_read_u32(cpu, "reg", &hwid)) { 读取reg属性的值并赋值给hwid
return;
}reg的属性值的8 MSBs必须设置为0,这是ARM CPU binding定义的。
if (hwid & ~MPIDR_HWID_BITMASK)
return;不允许重复的CPU id,那是一个灾难性的设定
for (j = 0; j < cpuidx; j++)
if (WARN(tmp_map[j] == hwid, "Duplicate /cpu reg "
"properties in the DT\n"))
return;数组tmp_map保存了系统中所有CPU的MPIDR值(CPU ID值),具体的index的编码规则是: tmp_map[0]保存了booting CPU的id值,其余的CPU的ID值保存在1~NR_CPUS的位置。
if (hwid == mpidr) {
i = 0;
bootcpu_valid = true;
} else {
i = cpuidx++;
}tmp_map[i] = hwid;
}根据DTB中的信息设定cpu logical map数组。
for (i = 0; i < cpuidx; i++) {
set_cpu_possible(i, true);
cpu_logical_map(i) = tmp_map[i];
}
}
要理解这部分的内容,需要理解ARM CUPs binding的概念,可以参考linux/Documentation/devicetree/bindings/arm目录下的CPU.txt文件的描述。
2、memory的处理
这部分的处理可以参考setup_arch->setup_machine_fdt->early_init_dt_scan->early_init_dt_scan_memory中的代码。具体如下:
int __init early_init_dt_scan_memory(unsigned long node, const char *uname,
int depth, void *data)
{
char *type = of_get_flat_dt_prop(node, "device_type", NULL); 获取device_type属性值
__be32 *reg, *endp;
unsigned long l;在初始化的时候,我们会对每一个device node都要调用该call back函数,因此,我们要过滤掉那些和memory block定义无关的node。和memory block定义有的节点有两种,一种是node name是memory@形态的,另外一种是node中定义了device_type属性并且其值是memory。
if (type == NULL) {
if (depth != 1 || strcmp(uname, "memory@0") != 0)
return 0;
} else if (strcmp(type, "memory") != 0)
return 0;获取memory的起始地址和length的信息。有两种属性和该信息有关,一个是linux,usable-memory,不过最新的方式还是使用reg属性。
reg = of_get_flat_dt_prop(node, "linux,usable-memory", &l);
if (reg == NULL)
reg = of_get_flat_dt_prop(node, "reg", &l);
if (reg == NULL)
return 0;endp = reg + (l / sizeof(__be32));
reg 属性的值是address,size数组,那么如何来取出一个个的address/size呢?由于memory node一定是root node的child,因此dt_root_addr_cells(root node的#address-cells属性值)和dt_root_size_cells(root node的#size-cells属性值)之和就是address,size数组的entry size。
while ((endp - reg) >= (dt_root_addr_cells + dt_root_size_cells)) {
u64 base, size;base = dt_mem_next_cell(dt_root_addr_cells, ®);
size = dt_mem_next_cell(dt_root_size_cells, ®);early_init_dt_add_memory_arch(base, size); 将具体的memory block信息加入到内核中。
}return 0;
}
3、interrupt controller的处理
初始化是通过start_kernel->init_IRQ->machine_desc->init_irq()实现的。我们用S3C2416为例来描述interrupt controller的处理过程。下面是machine描述符的定义。
DT_MACHINE_START(S3C2416_DT, "Samsung S3C2416 (Flattened Device Tree)")
……
.init_irq = irqchip_init,
……
MACHINE_END
在driver/irqchip/irq-s3c24xx.c文件中定义了两个interrupt controller,如下:
IRQCHIP_DECLARE(s3c2416_irq, "samsung,s3c2416-irq", s3c2416_init_intc_of);
IRQCHIP_DECLARE(s3c2410_irq, "samsung,s3c2410-irq", s3c2410_init_intc_of);
当 然,系统中可以定义更多的irqchip,不过具体用哪一个是根据DTB中的interrupt controller node中的compatible属性确定的。在driver/irqchip/irqchip.c文件中定义了irqchip_init函数,如下:
void __init irqchip_init(void)
{
of_irq_init(__irqchip_begin);
}
__irqchip_begin就是所有的irqchip的一个列表,of_irq_init函数是遍历Device Tree,找到匹配的irqchip。具体的代码如下:
void __init of_irq_init(const struct of_device_id *matches)
{
struct device_node *np, *parent = NULL;
struct intc_desc *desc, *temp_desc;
struct list_head intc_desc_list, intc_parent_list;INIT_LIST_HEAD(&intc_desc_list);
INIT_LIST_HEAD(&intc_parent_list);遍历所有的node,寻找定义了interrupt-controller属性的node,如果定义了interrupt-controller属性则说明该node就是一个中断控制器。
for_each_matching_node(np, matches) {
if (!of_find_property(np, "interrupt-controller", NULL) ||
!of_device_is_available(np))
continue;
分配内存并挂入链表,当然还有根据interrupt-parent建立controller之间的父子关系。对于interrupt controller,它也可能是一个树状的结构。
desc = kzalloc(sizeof(*desc), GFP_KERNEL);
if (WARN_ON(!desc))
goto err;desc->dev = np;
desc->interrupt_parent = of_irq_find_parent(np);
if (desc->interrupt_parent == np)
desc->interrupt_parent = NULL;
list_add_tail(&desc->list, &intc_desc_list);
}正因为interrupt controller被组织成树状的结构,因此初始化的顺序就需要控制,应该从根节点开始,依次递进到下一个level的interrupt controller。
while (!list_empty(&intc_desc_list)) { intc_desc_list链表中的节点会被一个个的处理,每处理完一个节点就会将该节点删除,当所有的节点被删除,整个处理过程也就是结束了。
list_for_each_entry_safe(desc, temp_desc, &intc_desc_list, list) {
const struct of_device_id *match;
int ret;
of_irq_init_cb_t irq_init_cb;最开始的时候parent变量是NULL,确保第一个被处理的是root interrupt controller。在处理完root node之后,parent变量被设定为root interrupt controller,因此,第二个循环中处理的是所有parent是root interrupt controller的child interrupt controller。也就是level 1(如果root是level 0的话)的节点。
if (desc->interrupt_parent != parent)
continue;list_del(&desc->list); -----从链表中删除
match = of_match_node(matches, desc->dev);-----匹配并初始化
if (WARN(!match->data,----------match->data是初始化函数
"of_irq_init: no init function for %s\n",
match->compatible)) {
kfree(desc);
continue;
}irq_init_cb = (of_irq_init_cb_t)match->data;
ret = irq_init_cb(desc->dev, desc->interrupt_parent);-----执行初始化函数
if (ret) {
kfree(desc);
continue;
}处理完的节点放入intc_parent_list链表,后面会用到
list_add_tail(&desc->list, &intc_parent_list);
}对于level 0,只有一个root interrupt controller,对于level 1,可能有若干个interrupt controller,因此要遍历这些parent interrupt controller,以便处理下一个level的child node。
desc = list_first_entry_or_null(&intc_parent_list,
typeof(*desc), list);
if (!desc) {
pr_err("of_irq_init: children remain, but no parents\n");
break;
}
list_del(&desc->list);
parent = desc->dev;
kfree(desc);
}list_for_each_entry_safe(desc, temp_desc, &intc_parent_list, list) {
list_del(&desc->list);
kfree(desc);
}
err:
list_for_each_entry_safe(desc, temp_desc, &intc_desc_list, list) {
list_del(&desc->list);
kfree(desc);
}
}
只 有该node中有interrupt-controller这个属性定义,那么linux kernel就会分配一个interrupt controller的描述符(struct intc_desc)并挂入队列。通过interrupt-parent属性,可以确定各个interrupt controller的层次关系。在scan了所有的Device Tree中的interrupt controller的定义之后,系统开始匹配过程。一旦匹配到了interrupt chip列表中的项次后,就会调用相应的初始化函数。如果CPU是S3C2416的话,匹配到的是irqchip的初始化函数是 s3c2416_init_intc_of。
OK,我们已经通过compatible属性找到了适合的interrupt controller,那么如何解析reg属性呢?我们知道,对于s3c2416的interrupt controller而言,其#interrupt-cells的属性值是4,定义为。每个域的解释如下:
(1)ctrl_num表示使用哪一种类型的interrupt controller,其值的解释如下:
- 0 ... main controller
- 1 ... sub controller
- 2 ... second main controller
(2)parent_irq。对于sub controller,parent_irq标识了其在main controller的bit position。
(3)ctrl_irq标识了在controller中的bit位置。
(4)type标识了该中断的trigger type,例如:上升沿触发还是电平触发。
为了更顺畅的描述后续的代码,我需要简单的介绍2416的中断控制器,其block diagram如下:
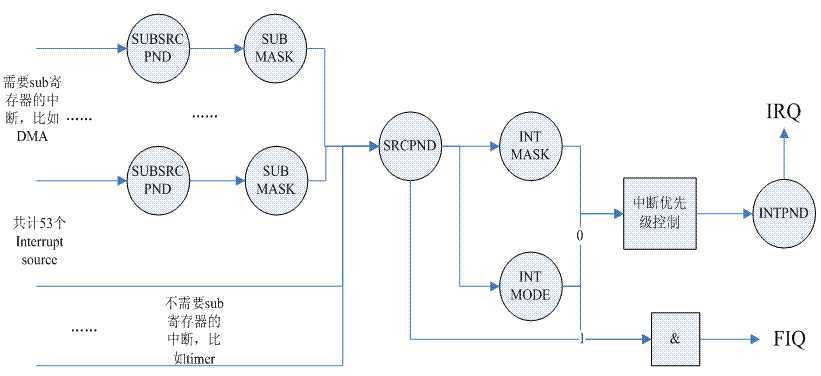
53
个Samsung2416的中断源被分成两种类型,一种是需要sub寄存器进行控制的,例如DMA,系统中的8个DMA中断是通过两级识别的,先在
SRCPND寄存器中得到是DMA中断的信息,具体是哪一个channel的DMA中断需要继续查询SUBSRC寄存器。那些不需要sub寄存器进行控制
的,例如timer,5个timer的中断可以直接从SRCPND中得到。
中断MASK寄存器可以控制产生的中断是否要报告给CPU,当
一个中断被mask的时候,虽然SRCPND寄存器中,硬件会set该bit,但是不会影响到INTPND寄存器,从而不会向CPU报告该中断。对于
SUBMASK寄存器,如果该bit被set,也就是该sub中断被mask了,那么即便产生了对应的sub中断,也不会修改SRCPND寄存器的内容,
只是修改SUBSRCPND中寄存器的内容。
不过随着硬件的演化,更多的HW block加入到SOC中,这使得中断源不够用了,因此中断寄存器又被分成两个group,一个是group 1(开始地址是0X4A000000,也就是main controller了),另外一个是group2(开始地址是0X4A000040,叫做second main controller)。group 1中的sub寄存器的起始地址是0X4A000018(也就是sub controller)。
了解了上面的内容后,下面的定义就比较好理解了:
static struct s3c24xx_irq_of_ctrl s3c2416_ctrl[] = {
{
.name = "intc", -----------main controller
.offset = 0,
}, {
.name = "subintc", ---------sub controller
.offset = 0x18,
.parent = &s3c_intc[0],
}, {
.name = "intc2", ----------second main controller
.offset = 0x40,
}
};
对 于s3c2416而言,irqchip的初始化函数是s3c2416_init_intc_of,s3c2416_ctrl作为参数传递给了 s3c_init_intc_of,大部分的处理都是在s3c_init_intc_of函数中完成的,由于这个函数和中断子系统非常相关,这里就不详述 了,后续会有一份专门的文档描述之。
4、GPIO controller的处理
暂不描述,后续会有一份专门的文档描述GPIO sub system。
5、machine初始化
machine 初始化的代码可以沿着 start_kernel->rest_init->kernel_init->kernel_init_freeable->do_basic_setup->do_initcalls 路径寻找。在do_initcalls函数中,kernel会依次执行各个initcall函数,在这个过程中,会调用 customize_machine,具体如下:
static int __init customize_machine(void)
{
if (machine_desc->init_machine)
machine_desc->init_machine();
else
of_platform_populate(NULL, of_default_bus_match_table, NULL, NULL);
return 0;
}
arch_initcall(customize_machine);
在 这个函数中,一般会调用machine描述符中的init_machine callback函数来把各种Device Tree中定义各个设备节点加入到系统。如果machine描述符中没有定义init_machine函数,那么直接调用 of_platform_populate把所有的platform device加入到kernel中。对于s3c2416,其machine描述符中的init_machine callback函数就是s3c2416_dt_machine_init,代码如下:
static void __init s3c2416_dt_machine_init(void)
{
of_platform_populate(NULL, --------传入NULL参数表示从root node开始scanof_default_bus_match_table, s3c2416_auxdata_lookup, NULL);
s3c_pm_init(); --------power management相关的初始化
}
由 此可见,最终生成platform device的代码来自of_platform_populate函数。该函数的逻辑比较简单,遍历device node global list中所有的node,并调用of_platform_bus_create处理,of_platform_bus_create函数代码如下:
static int of_platform_bus_create(struct device_node *bus,-------------要创建的那个device node
const struct of_device_id *matches,-------要匹配的list
const struct of_dev_auxdata *lookup,------附属数据
struct device *parent, bool strict)---------------parent指向父节点。strict是否要求完全匹配
{
const struct of_dev_auxdata *auxdata;
struct device_node *child;
struct platform_device *dev;
const char *bus_id = NULL;
void *platform_data = NULL;
int rc = 0;删除确保device node有compatible属性的代码。
auxdata = of_dev_lookup(lookup, bus); 在传入的lookup table寻找和该device node匹配的附加数据
if (auxdata) {
bus_id = auxdata->name;-----------------如果找到,那么就用附加数据中的静态定义的内容
platform_data = auxdata->platform_data;
}ARM 公司提供了CPU core,除此之外,它设计了AMBA的总线来连接SOC内的各个block。符合这个总线标准的SOC上的外设叫做ARM Primecell Peripherals。如果一个device node的compatible属性值是arm,primecell的话,可以调用of_amba_device_create来向amba总线上增加一 个amba device。
if (of_device_is_compatible(bus, "arm,primecell")) {
of_amba_device_create(bus, bus_id, platform_data, parent);
return 0;
}如果不是ARM Primecell Peripherals,那么我们就需要向platform bus上增加一个platform device了
dev = of_platform_device_create_pdata(bus, bus_id, platform_data, parent);
if (!dev || !of_match_node(matches, bus))
return 0;一个device node可能是一个桥设备,因此要重复调用of_platform_bus_create来把所有的device node处理掉。
for_each_child_of_node(bus, child) {
pr_debug(" create child: %s\n", child->full_name);
rc = of_platform_bus_create(child, matches, lookup, &dev->dev, strict);
if (rc) {
of_node_put(child);
break;
}
}
return rc;
}
具体增加platform device的代码在of_platform_device_create_pdata中,代码如下:
static struct platform_device *of_platform_device_create_pdata(
struct device_node *np,
const char *bus_id,
void *platform_data,
struct device *parent)
{
struct platform_device *dev;if (!of_device_is_available(np))---------check status属性,确保是enable或者OK的。
return NULL;of_device_alloc除了分配struct platform_device的内存,还分配了该platform device需要的resource的内存(参考struct platform_device 中的resource成员)。当然,这就需要解析该device node的interrupt资源以及memory address资源。
dev = of_device_alloc(np, bus_id, parent);
if (!dev)
return NULL;设定platform_device 中的其他成员
dev->dev.coherent_dma_mask = DMA_BIT_MASK(32);
if (!dev->dev.dma_mask)
dev->dev.dma_mask = &dev->dev.coherent_dma_mask;
dev->dev.bus = &platform_bus_type;
dev->dev.platform_data = platform_data;if (of_device_add(dev) != 0) {------------------把这个platform device加入统一设备模型系统中
platform_device_put(dev);
return NULL;
}return dev;
}
标签:des style blog http io ar os 使用 sp
原文地址:http://www.cnblogs.com/pengdonglin137/p/4099471.html