标签:blog http io ar os 使用 sp on 数据
1.时钟发生器2.指令寄存器3.累加器4.RISC CPU算术逻辑运算单元5.数据控制器6.状态控制器7.程序计数器8.地址多路器9.外围模块10.地址译码器
a.RAMb.ROM

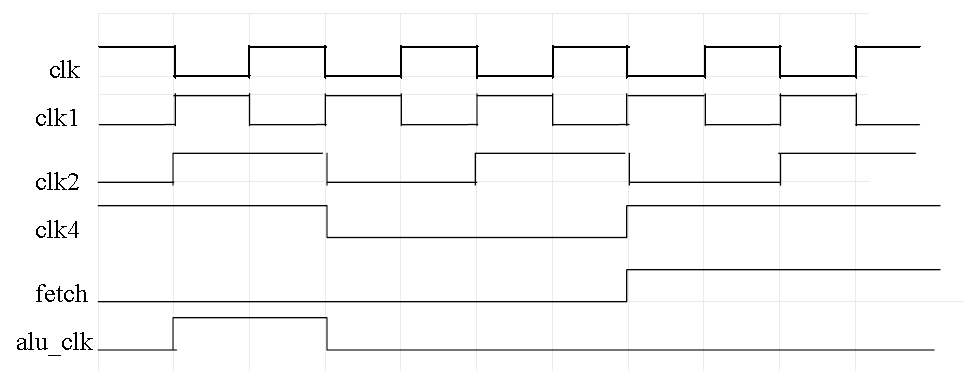
module clk_gen (clk,reset,clk1,clk2,clk4,fetch,alu_clk); input clk,reset; output clk1,clk2,clk4,fetch,alu_clk; wire clk,reset; reg clk2,clk4,fetch,alu_clk; reg[7:0] state; parameter S1 = 8‘b00000001, S2 = 8‘b00000010, S3 = 8‘b00000100, S4 = 8‘b00001000, S5 = 8‘b00010000, S6 = 8‘b00100000, S7 = 8‘b01000000, S8 = 8‘b10000000, idle = 8‘b00000000; assign clk1 = ~clk; always @(negedge clk) if(reset) begin clk2 <= 0; clk4 <= 1; fetch <= 0; alu_clk <= 0; state <= idle; end else begin case(state) S1: begin clk2 <= ~clk2; alu_clk <= ~alu_clk; state <= S2; end S2: begin clk2 <= ~clk2; clk4 <= ~clk4; alu_clk <= ~alu_clk; state <= S3; end S3: begin clk2 <= ~clk2; state <= S4; end S4: begin clk2 <= ~clk2; clk4 <= ~clk4; fetch <= ~fetch; state <= S5; end S5: begin clk2 <= ~clk2; state <= S6; end S6: begin clk2 <= ~clk2; clk4 <= ~clk4; state <= S7; end S7: begin clk2 <= ~clk2; state <= S8; end S8: begin clk2 <= ~clk2; clk4 <= ~clk4; fetch <= ~fetch; state <= S1; end idle: state <= S1; default: state <= idle; endcase end endmodule //--------------------------------------------------------------------------------由于在时钟发生器的设计中采用了同步状态机的设计方法,不但使clk_gen模块的源程序可以被各种综合器综合,也使得由其生成的clk1、clk2、clk4、fetch、alu_clk 在跳变时间同步性能上有明显的提高,为整个系统的性能提高打下了良好的基础。
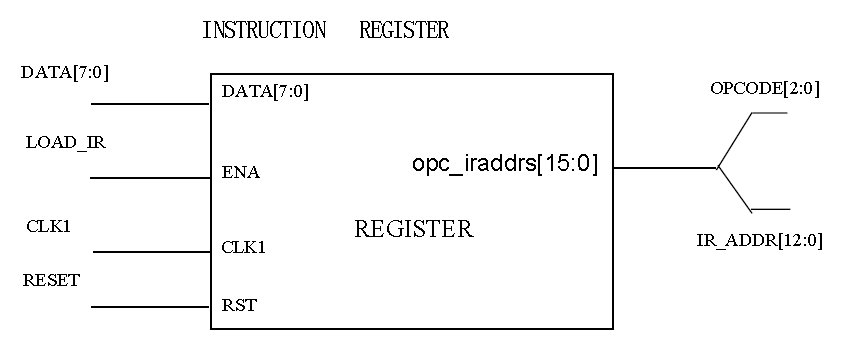
//--------------------------------------------------------------- module register(opc_iraddr,data,ena,clk1,rst); output [15:0] opc_iraddr; input [7:0] data; input ena, clk1, rst; reg [15:0] opc_iraddr; reg state; always @(posedge clk1) begin if(rst) begin opc_iraddr<=16‘b0000_0000_0000_0000; state<=1‘b0; end else begin if(ena) //如果加载指令寄存器信号load_ir到来, begin //分两个时钟每次8位加载指令寄存器 casex(state) //先高字节,后低字节 1’b0: begin opc_iraddr[15:8]<=data; state<=1; end 1’b1: begin opc_iraddr[7:0]<=data; state<=0; end default: begin opc_iraddr[15:0]<=16‘bxxxxxxxxxxxxxxxx; state<=1‘bx; end endcase end else state<=1‘b0; end end endmodule //--------------------------------------------------------

//-------------------------------------------------------------- module accum( accum, data, ena, clk1, rst); output[7:0]accum; input[7:0]data; input ena,clk1,rst; reg[7:0]accum; always@(posedge clk1) begin if(rst) accum<=8‘b0000_0000; //Reset else if(ena) //当CPU状态控制器发出load_acc信号 accum<=data; //Accumulate end endmodule
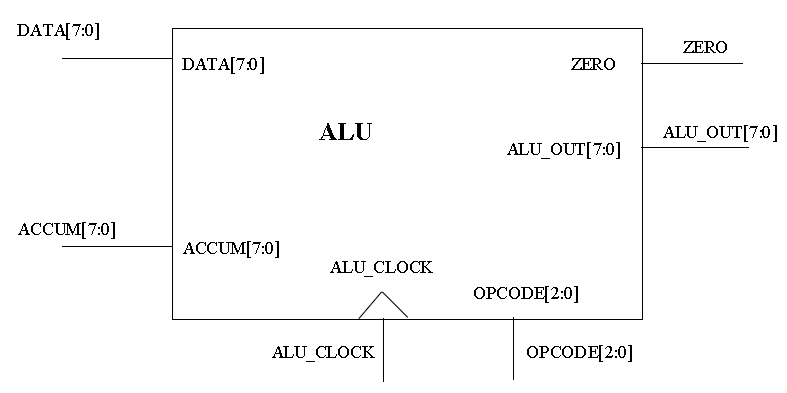
//------------------------------------------------------------------------------ module alu (alu_out, zero, data, accum, alu_clk, opcode); output [7:0]alu_out; output zero; input [7:0] data, accum; input [2:0] opcode; input alu_clk; reg [7:0] alu_out; parameter HLT =3’b000, SKZ =3’b001, ADD =3’b010, ANDD =3’b011, XORR =3’b100, LDA =3’b101, STO =3’b110, JMP =3’b111; assign zero = !accum; always @(posedgealu_clk) begin //操作码来自指令寄存器的输出opc_iaddr<15..0>的低3位 casex (opcode) HLT: alu_out<=accum; SKZ: alu_out<=accum; ADD: alu_out<=data+accum; ANDD: alu_out<=data&accum; XORR: alu_out<=data^accum; LDA: alu_out<=data; STO: alu_out<=accum; JMP: alu_out<=accum; default: alu_out<=8‘bxxxx_xxxx; endcase end endmodule //----------------------------------------------------------------------------

//-------------------------------------------------------------------- module datactl (data,in,data_ena); output [7:0]data; input [7:0]in; input data_ena; assign data = (data_ena)? In : 8‘bzzzz_zzzz; endmodule //--------------------------------------------------------------------

//------------------------------------------------------------------------------ module adr(addr,fetch,ir_addr,pc_addr); output [12:0] addr; input [12:0] ir_addr, pc_addr; input fetch; assign addr = fetch? pc_addr : ir_addr; endmodule //------------------------------------------------------------------------------
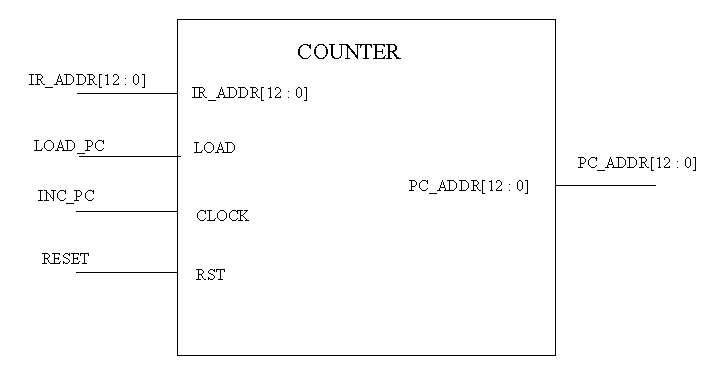
//------------------------------------------------------------------------------ module counter ( pc_addr, ir_addr, load, clock, rst); output [12:0] pc_addr; input [12:0] ir_addr; input load, clock, rst; reg [12:0] pc_addr; always @( posedge clock or posedge rst ) begin if(rst) pc_addr<=13‘b0_0000_0000_0000; else if(load) pc_addr<=ir_addr; else pc_addr <= pc_addr + 1; end endmodule //------------------------------------------------------------------------------

//------------------------------------------------------------------------------ module machinectl( ena, fetch, rst); output ena; input fetch, rst; reg ena; always @(posedge fetch or posedge rst) begin if(rst) ena<=0; else ena<=1; end endmodule //------------------------------------------------------------------------------状态机是CPU的控制核心,用于产生一系列的控制信号,启动或停止某些部件。CPU何时进行读指令读写I/O端口,RAM区等操作,都是由状态机来控制的。状态机的当前状态,由变量state记录,state的值就是当前这个指令周期中已经过的时钟数(从零计起)。
//------------------------------------------------------------------------------
module machine( inc_pc, load_acc, load_pc, rd,wr, load_ir,
datactl_ena, halt, clk1, zero, ena, opcode );
output inc_pc, load_acc, load_pc, rd, wr, load_ir;
output datactl_ena, halt;
input clk1, zero, ena;
input [2:0] opcode;
reg inc_pc, load_acc, load_pc, rd, wr, load_ir;
reg datactl_ena, halt;
reg [2:0] state;
parameter HLT = 3 ‘b000,
SKZ = 3 ‘b001,
ADD = 3 ‘b010,
ANDD = 3 ‘b011,
XORR = 3 ‘b100,
LDA = 3 ‘b101,
STO = 3 ‘b110,
JMP = 3 ‘b111;
always @( negedge clk1 )
begin
if ( !ena ) //接收到复位信号RST,进行复位操作
begin
state<=3‘b000;
{inc_pc,load_acc,load_pc,rd}<=4‘b0000;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
else
ctl_cycle;
end
//-----------------begin of task ctl_cycle---------
task ctl_cycle;
begin
casex(state)
3’b000: //load high 8bits in struction
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0001;
{wr,load_ir,datactl_ena,halt}<=4‘b0100;
state<=3’b001;
end
3’b001: //pc increased by one then load low 8bits instruction
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b1001;
{wr,load_ir,datactl_ena,halt}<=4‘b0100;
state<=3’b010;
end
3’b010: //idle
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0000;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
state<=3’b011;
end
3’b011: //next instruction address setup 分析指令从这里开始
begin
if(opcode==HLT) //指令为暂停HLT
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b1000;
{wr,load_ir,datactl_ena,halt}<=4‘b0001;
end
else
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b1000;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
state<=3’b100;
end
3’b100: //fetch oprand
begin
if(opcode==JMP)
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0010;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
else
if( opcode==ADD || opcode==ANDD ||
opcode==XORR || opcode==LDA)
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0001;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
else
if(opcode==STO)
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0000;
{wr,load_ir,datactl_ena,halt}<=4‘b0010;
end
else
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0000;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
state<=3’b101;
end
3’b101: //operation
begin
if ( opcode==ADD||opcode==ANDD||opcode==XORR||opcode==LDA )
begin //过一个时钟后与累加器的内容进行运算
{inc_pc,load_acc,load_pc,rd}<=4‘b0101;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
else
if( opcode==SKZ && zero==1)
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b1000;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
else
if(opcode==JMP)
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b1010;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
else
if(opcode==STO)
begin
//过一个时钟后把wr变1就可写到RAM中
{inc_pc,load_acc,load_pc,rd}<=4‘b0000;
{wr,load_ir,datactl_ena,halt}<=4‘b1010;
end
else
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0000;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
state<=3’b110;
end
3’b110: //idle
begin
if ( opcode==STO )
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0000;
{wr,load_ir,datactl_ena,halt}<=4‘b0010;
end
else
if ( opcode==ADD||opcode==ANDD||opcode==XORR||opcode==LDA)
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0001;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
else
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0000;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
state<=3’b111;
end
3’b111: //
begin
if( opcode==SKZ && zero==1 )
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b1000;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
else
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0000;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
end
state<=3’b000;
end
default:
begin
{inc_pc,load_acc,load_pc,rd}<=4‘b0000;
{wr,load_ir,datactl_ena,halt}<=4‘b0000;
state<=3’b000;
end
endcase
end
endtask
//-----------------end of task ctl_cycle---------
endmodule
//------------------------------------------------------------------------------
module addr_decode( addr, rom_sel, ram_sel);
output rom_sel, ram_sel;
input [12:0] addr;
reg rom_sel, ram_sel;
always @( addr )
begin
casex(addr)
13‘b1_1xxx_xxxx_xxxx:{rom_sel,ram_sel}<=2‘b01;
13‘b0_xxxx_xxxx_xxxx:{rom_sel,ram_sel}<=2‘b10;
13‘b1_0xxx_xxxx_xxxx:{rom_sel,ram_sel}<=2‘b10;
default:{rom_sel,ram_sel}<=2‘b00;
endcase
end
endmodule
地址译码器用于产生选通信号,选通ROM或RAM。 module ram( data, addr, ena, read, write ); inout [7:0] data; input [9:0] addr; input ena; input read, write; reg [7:0] ram [10‘h3ff:0]; assign data = ( read && ena )? ram[addr] : 8‘hzz; always @(posedge write) begin ram[addr]<=data; end endmodule
module rom( data, addr, read, ena ); output [7:0] data; input [12:0] addr; input read, ena; reg [7:0] memory [13‘h1fff:0]; wire [7:0] data; assign data= ( read && ena )? memory[addr] : 8‘bzzzzzzzz; endmodule
ROM用于装载测试程序,可读不可写。RAM用于存放数据,可读可写。





标签:blog http io ar os 使用 sp on 数据
原文地址:http://www.cnblogs.com/Karma-wjc/p/4132184.html