标签:style blog http ar color os 使用 sp strong
一、大致介绍:
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。

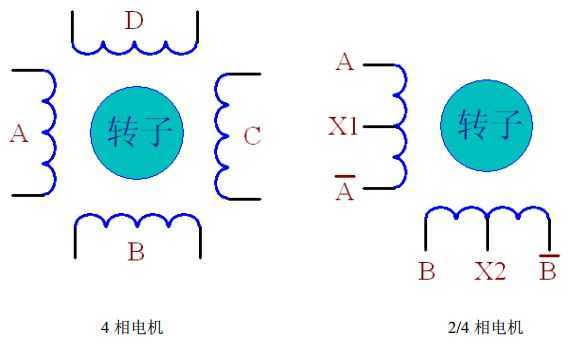
图1 常见的几种步进电机
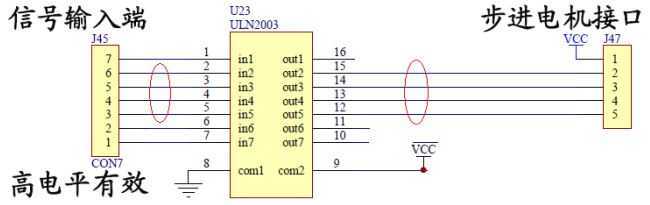
图2 步进电机和ULN2003合用
二、常用术语
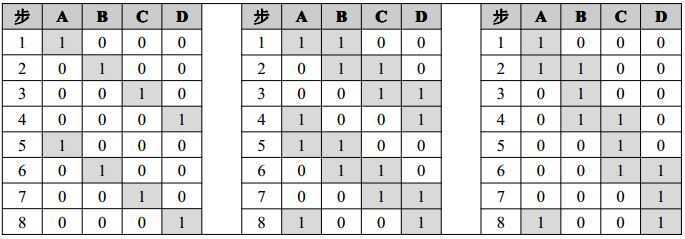
1 /*----------------------------------------------- 2 名称:步进电机 3 论坛:www.doflye.net 4 编写:shifang 5 日期:2009.5 6 修改:无 7 内容:本程序用于测试4相步进电机常规驱动 使用1相励磁 8 ------------------------------------------------*/ 9 #include <reg52.h> 10 11 sbit A1=P1^0; //定义步进电机连接端口 12 sbit B1=P1^1; 13 sbit C1=P1^2; 14 sbit D1=P1^3; 15 16 #define Coil_A1 {A1=1;B1=0;C1=0;D1=0;}//A相通电,其他相断电 17 #define Coil_B1 {A1=0;B1=1;C1=0;D1=0;}//B相通电,其他相断电 18 #define Coil_C1 {A1=0;B1=0;C1=1;D1=0;}//C相通电,其他相断电 19 #define Coil_D1 {A1=0;B1=0;C1=0;D1=1;}//D相通电,其他相断电 20 #define Coil_OFF {A1=0;B1=0;C1=0;D1=0;}//全部断电 21 22 unsigned char Speed; 23 /*------------------------------------------------ 24 uS延时函数,含有输入参数 unsigned char t,无返回值 25 unsigned char 是定义无符号字符变量,其值的范围是 26 0~255 这里使用晶振12M,精确延时请使用汇编,大致延时 27 长度如下 T=tx2+5 uS 28 ------------------------------------------------*/ 29 void DelayUs2x(unsigned char t) 30 { 31 while(--t); 32 } 33 /*------------------------------------------------ 34 mS延时函数,含有输入参数 unsigned char t,无返回值 35 unsigned char 是定义无符号字符变量,其值的范围是 36 0~255 这里使用晶振12M,精确延时请使用汇编 37 ------------------------------------------------*/ 38 void DelayMs(unsigned char t) 39 { 40 while(t--) 41 { 42 //大致延时1mS 43 DelayUs2x(245); 44 DelayUs2x(245); 45 } 46 } 47 /*------------------------------------------------ 48 主函数 49 ------------------------------------------------*/ 50 main() 51 { 52 Speed=5; //调整速度 53 while(1) 54 { 55 Coil_A1 //遇到Coil_A1 用{A1=1;B1=0;C1=0;D1=0;}代替 56 DelayMs(Speed); //改变这个参数可以调整电机转速 , 57 //数字越小,转速越大,力矩越小 58 Coil_B1 59 DelayMs(Speed); 60 Coil_C1 61 DelayMs(Speed); 62 Coil_D1 63 DelayMs(Speed); 64 } 65 }
标签:style blog http ar color os 使用 sp strong
原文地址:http://www.cnblogs.com/zjutlitao/p/4154069.html