标签:blog http ar os sp on log bs as
翻译自: http://www.metro-hs.ac.jp/rs/sinohara/zahyou_rot/zahyou_rotate.htm
翻译: 汤 永康
出处: http://blog.csdn.net/tangyongkang
转贴请注明出处
1 围绕原点的旋转
如下图, 在2维坐标上,有一点p(x, y) , 直线opの长度为r, 直线op和x轴的正向的夹角为a。 直线op围绕原点做逆时针方向b度的旋转,到达p’ (s,t) 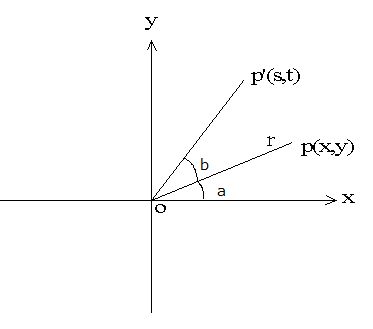
s = r cos(a + b) = r cos(a)cos(b) – r sin(a)sin(b) (1.1)
t = r sin(a + b) = r sin(a)cos(b) + r cos(a) sin(b) (1.2)
其中 x = r cos(a) , y = r sin(a)
代入(1.1), (1.2) ,
s = x cos(b) – y sin(b) (1.3)
t = x sin(b) + y cos(b) (1.4)
用向量和矩阵表达如下:
2.坐标系的旋转
在原坐标系xoy中, 绕原点沿逆时针方向旋转theta度, 变成座标系 sot。
设有某点p,在原坐标系中的坐标为 (x, y), 旋转后的新坐标为(s, t)。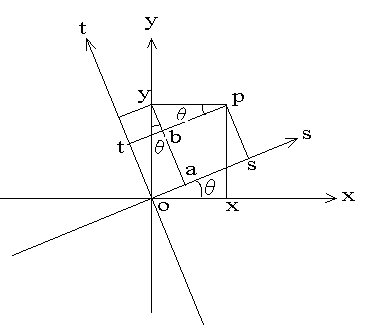
oa = y sin(theta) (2.1)
as = x cos(theta) (2.2)
综合(2.1),(2.2) 2式
s = os = oa + as = x cos(theta) + y sin(theta)
t = ot = ay – by = y cos(theta) – x sin(theta)
用向量和矩阵表达如下:
标签:blog http ar os sp on log bs as
原文地址:http://www.cnblogs.com/wxdlut/p/4157469.html