标签:
今天学习了Simulinl混合仿真系统,实际的系统常常是混合系统(即系统中有连续信号也有离散信号)。在对这类系统进行仿真时必须考虑连续信号和离散信号采样时间之间的匹配问题。Simulink中的变步长连续求解器充分考虑了上述问题。所以在对混合系统进行仿真分析时,应该使用变步长连续求解器。现在通过一个实例来进行系统的总结一下。下面的例子来自教材《基于MATLAB7.x+SIMULINK_STATEFLOW系统仿真、分析及设计》。
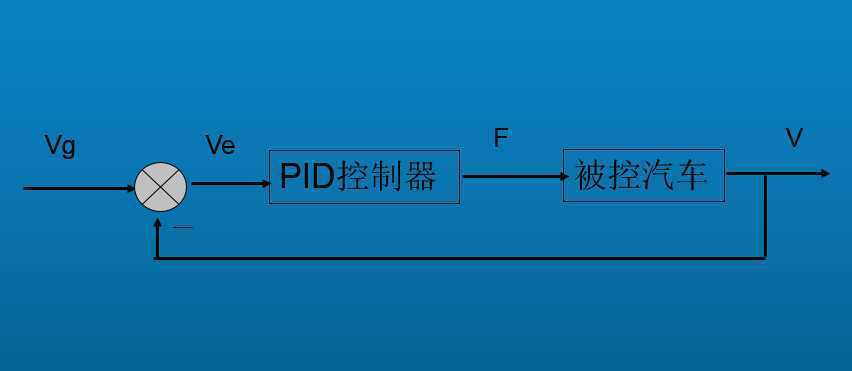
使用汽车速度操纵机构的位置变化量设置汽车的指定速度;测量汽车的当前速度,求取它与指定速度的差值;由差值信号产生控制信号驱动汽车产生相应的牵引力以改变并控制汽车速度直到达到指定速度。
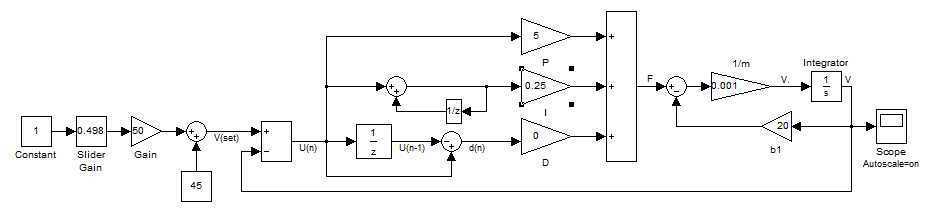
用simulink进行建模如下:
利用这个模型又研究了PID控制中P,I,D这三个参数对控制的变量的影响。实验的结果如下:
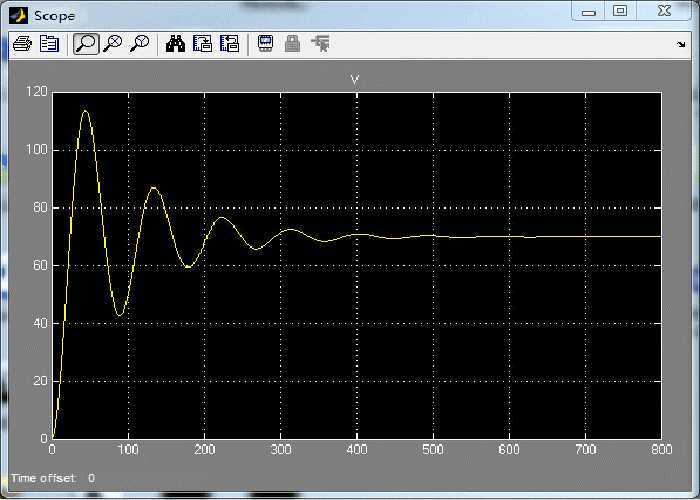
只对P参数进行调节P 参数由1增加到30
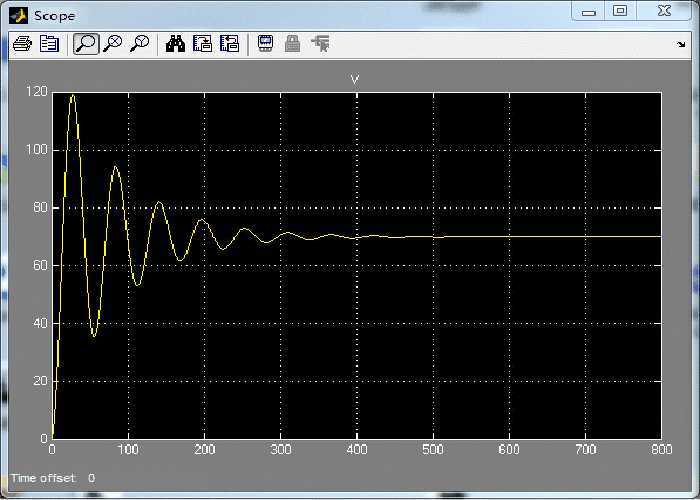
只对I参数进行调节,P由0.25减小到0.005
由上面的实验可以直观的看出PID控制中P和I参数对对控制的变量的影响。P和I都能使得受控变量的波动变小,但是P要增大才能实现信号的稳定,而且只是减小信号的幅值;I要减小才能实现信号的稳定,而且在减小信号幅值的同时也会延迟信号达到稳定所用的时间。至于D参数,在试验中发现其影响很不明显。
标签:
原文地址:http://www.cnblogs.com/VincentZhang/p/4217142.html