标签:
描述四轴的姿态不是我们作为旁观者那样简单,而需要站在机器的角度去看,假设现在只能通过陀螺仪获取。那么怎么去获取飞行器的姿态了?
要了解当前的姿态,就需要两个坐标系,只有知道了两个坐标系的相对位置才能了解空间中真正的位置。
一个就是相对不变的 空间参考系S 和 跟随刚体一起运动的 附体参考系B。那么我们干才的姿态问题就变为了解刚体的取向问题了,
在这个问题中就涉及到两个坐标系之间的转换,这里的原理其实和我昨天提到的向量的旋转是类似的.
1.那么什么是空间坐标系S ,什么又是附体参考系B 了?
假如在一个屋子里,这个屋子是六面体,那么空间坐标系S就是以墙角为原点,沿三条互相垂直的线为xyz坐标的一个坐标系,这个坐标系可以是任意取向的
但是为了方便z轴垂直向上。,因为其实不变的所以是一个惯性参考系。
对于附体参考系B,你可以把自己的躯体看成一个z轴至于xy轴你可以随意,然后这个坐标系就跟着你一起运动。现在你在战斗机上就可以根据与空间坐标系S
的相对位置来确定自己的姿态了...因为通常是带有加速度的所以是非惯性系.
在许多关于四轴的文献中 通常称 空间坐标系S为大地坐标系,称附体坐标系B 为机体坐标系
2.关于昨天的截图了表示的是什么?
我们分部来,先把这部分弄清楚。在上一次我提到二维空间的顺时针旋转矩阵,今天手写了一份很简单的推算
由于手机相片的质量问题暂时不能插上图片,明天补上。
其实先可以参考维基百科 http://zh.wikipedia.org/wiki/%E6%97%8B%E8%BD%AC%E7%9F%A9%E9%98%B5

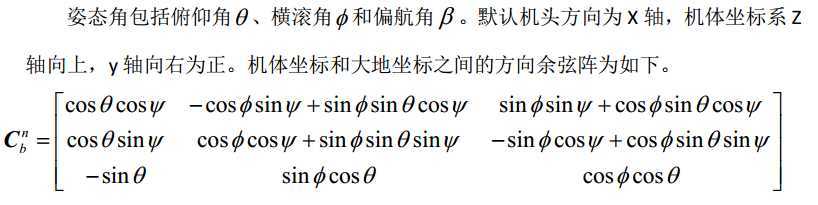
大致意思就是向量 X=M(θ)e,矩阵M与向量e相乘就能把向量逆时针旋转θ得到向量X.同理,这就是上面 的作用,只不过放到了三维空间,乘以就能将机体坐标的旋转转化到大地坐标上
的作用,只不过放到了三维空间,乘以就能将机体坐标的旋转转化到大地坐标上
等效的旋转。至于这部分内容大家可以参考 http://zh.wikipedia.org/wiki/%E6%96%B9%E5%90%91%E9%A4%98%E5%BC%A6
怕大家不是特别了解欧拉角的意思

此图来自于维基百科,相信能帮助大家了解三个角度的定义。
实际上pitch roll yaw 都是可以看成二维的旋转,大家可以试着去想象一下。今天的内容有点抽象,先就这么多。明天我会更详细的介绍旋转矩阵,欧拉角和四元数的关系。
now English version
have you ever think the questiong that how to describe posture of four axis?
when you are in the plane ,the only information you can get is angular velocity of three
axis.You can also know the angle by inergral.
Then ,you are in non inertial system because you have acceleration .And if you want to
know the movement state ,you should have reference system which we called geodetic
coordinate system or space coordinate system(大地坐标系) .
And the angle you get should put into the body coordinate system or attach the body
reference system (机体坐标系).
So ,how to change one vector in body coordinate system transform into another vector in
geodetic coordinate system ?
The matrix is born for this .And the matrix i had put in this article.
the principle is that the product of vector ‘e‘ and the matrix can change into another
vector ‘X‘ . When ‘e‘ clockwise rotated θ is equal to ‘X‘.
Infact, pitch,roll,yaw can be regareded as two-dimensional rotation. In this way ,you
might get a deep understanding.
It could be some abstract .don‘t give up. Tomorrw ,i will introduce the rotation matrix in details
and the relationship between the Euler angle and quaternion.
thinks ....
是该洗洗睡了·····
标签:
原文地址:http://www.cnblogs.com/bigben/p/4261356.html