标签:
这两天有点时间,捣鼓了下那闲置好久的树莓派,把普通PC主板的蜂鸣器作为树莓派的报警器用。
Raspberry Pi有许多的GPIO(General Purpose Input Output:通用输入/输出),可以用来控制和读取数字电路中TTL电平的逻辑0和逻辑1。
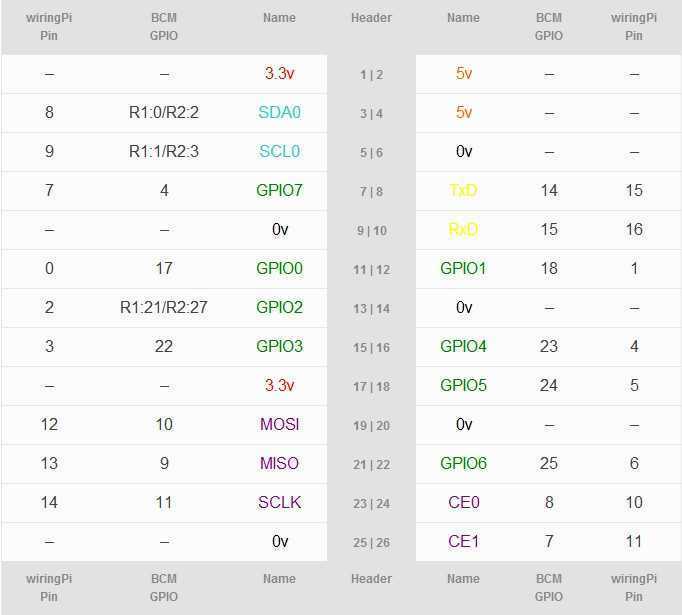
我们要使用RPi的GPIO首先要知其GPIO的定义,常用的有两种编号定义:WiringPi Pin和BCM GPIO。
GPIO的驱动库我这里介绍两种给大家,一种为C语言的WiringPi,另一种为python的RPi.GPIO,本例使用的是WiringPi。
接线比较简单,把蜂鸣器的红线接GPIO1口(pin:12,即BCM_GPIO 18),黑线接GND(pin:6)。
至于为什么接GPIO1口,主要是因为树莓派只有这个口支持PWM输出。
pin编号如下图所示:
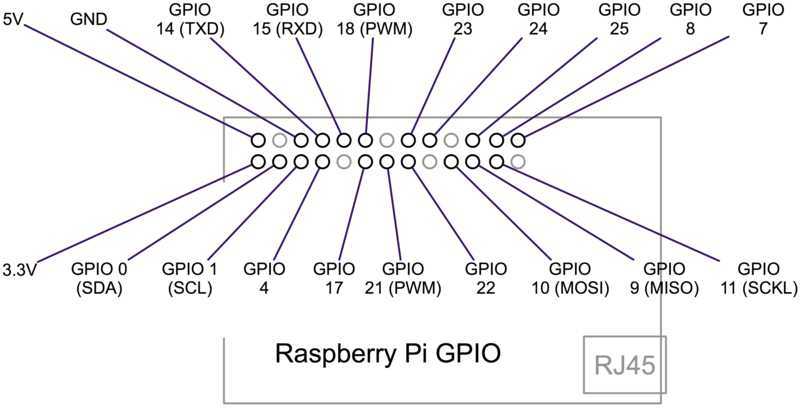
具体代码如下:
alarm.h
#include <wiringPi.h> #define PIN_NO 1 int init(); void alarm(int count, int value, int interval); void stopAlarm();
alarm.c
#include <stdio.h> #include <stdlib.h> #include "alarm.h" static short isok; int init(){ if(!isok){ if(wiringPiSetup() == -1){ printf("WiringPi setup failed!\n"); return 0; }else{ isok = 1; } } return 1; } void alarm(int count, int value, int interval){ if(!init()) return; //printf("Speaker pin: GPIO%d\n",PIN_NO); pinMode(PIN_NO,PWM_OUTPUT);//设置引脚模式,模式为INPUT、OUTPUT 或者 PWM_OUTPUT,注意:仅wiringPi引脚1(即BCM_GPIO 18)支持PWM输出 pwmSetMode(PWM_MODE_MS); //pwmSetRange(1024); int c; for(c = 0;c < count; c++){ pwmWrite(PIN_NO,value); //printf("%d\n",count - c); delay(interval); pwmWrite(PIN_NO,-1); delay(interval); } stopAlarm(); } void stopAlarm(){ if(!init()) return; pwmWrite(PIN_NO,-1); //pwmSetMode(PWM_MODE_BAL); }
alarm_test.c
#include <stdio.h> #include <stdlib.h> #include "alarm.h" int main(int argc, char *argv[]) { if(argc < 4){ printf("arg error! At least 3 parameters!\n"); return 1; }else{ int count = atoi(argv[1]); int value = atoi(argv[2]); int interval = atoi(argv[3]); printf("Count:%d\tValue:%d\tInterval:%d\n", count, value, interval); printf("Alarm start!\n"); alarm(count, value, interval); printf("Alarm complete!\n"); } return 0; }
编译:
gcc -c -o alarm.o alarm.c -lwiringPi
gcc -o alarm_test alarm_test.c alarm.o -lwiringPi
执行:
sudo ./alarm_test 10 1000 1000
标签:
原文地址:http://www.cnblogs.com/mic86/p/4262025.html