标签:
其实在前面的文章中我觉得应该给大家介绍一下。我们所讨论的姿态问题是几何中的定向问题,
在三维空间中我们如果需要知道一个刚体的具体方位,可以选定一个点这个点相对于刚体本身不会
动,但是这不足以了解运动的全貌,我们还需要一个旋转角度来确定。
以上的内容可以这样想象,在我们研究物理问题中常常采用质点的方法。比如在北京开往武汉的火车这个问题上,我们可以吧火车等效为质点,但是如果研究轮子的话,不仅需要位置的平移还需要角度的变化..额不知道大家理解没。
正是这个问题是惯导技术的基石我个人认为,在之后逐渐就有了以下的表示方法
1.欧拉角
这种方法是将运动分解到三个有序的特定运动,也就是大家熟知的pitch,roll,yaw,
在一些地方又称为泰特-布莱恩角或导航角...总之都说的是这几个角.
2.旋转向量
将三个有序的特定运动等效到一个轴上的转动,这个向量中,转动轴与向量同线,值为转动的角度
3.旋转矩阵(方向余弦矩阵)
不知道维基百科的欧拉向量是不是就是旋转向量。欧拉向量是旋转矩阵的特征向量(一个旋转矩阵必定有唯一的,实值的特征值)。两个旋转矩阵的乘积等于对应的转动的合成。因此,定向可以用从参考系的一个转动所相应的旋转矩阵来表示。-摘自维基百科.
4.定向四元数
定向四元数方法是另外一种描述转动的方法。等价于旋转矩阵方法,定向四元数除去了旋转矩阵里面的重复资料。所以,定向四元数方法比较简实与有效率。
大家可以参考维基百科http://zh.wikipedia.org/wiki/%E5%AE%9A%E5%90%91_(%E5%B9%BE%E4%BD%95)
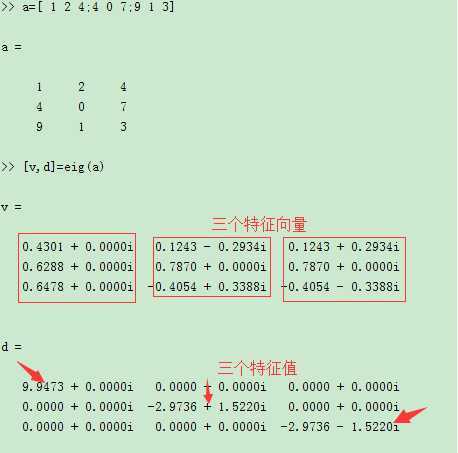
因为旋转矩阵中提到特征向量,特征值那么我在次贴上用matlab计算以上数值的方法
今天有点懒.....内容不是特别多....明天加油了
now English version
In fact,i think we should know more about the orientation(geometry).
In geometry,you wan to get a posture of rigid body .A point in rigid body is not enough because rigid body can rotate .
So ,we should also know the angle of rigid body. I think it‘s easy to understand .There is no need to give an example.
And ,for rotarion matrix had referred the feature vector, I showed the code of calculateing feature vector in
matlab. The details were in the picture.
The more details you can referred wikipedia . There is websit http://en.wikipedia.org/wiki/Orientation_(geometry)
thinks....
从今天起早睡早起333....
标签:
原文地址:http://www.cnblogs.com/bigben/p/4263473.html