标签:
“齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射(线性)几何变换。”—— F.S. Hill, JR。
齐次坐标主要是应用在矩阵转换中,我们通常运算的坐标系是“笛卡尔坐标系”,我们已经习惯了笛卡尔坐标系的表述方式,一个点都有唯一对应的数据值来表示,比如原点我们就记做(0,0)点。而笛卡尔坐标系和齐次坐标系的根本区别在于“齐次性”。
所谓齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示。 显然一个向量的齐次表示是不唯一的,齐次坐标的h取不同的值都表示的是同一个点,比如齐次坐标[10,4,2]、[5,2,1]表示的都是二维点[5,2]。
那么引进齐次坐标有什么必要,它有什么优点呢?
由于[10,4,2]、[5,2,1]表示的都是[5,2]一个点,如果有一个公式需要将[5,2]点参与的运算3维运算,而我们的点只有2维的表示,那么我们在值不变的情况下增加一个齐次坐标,使之变成3维,而能够参加运算并不影响最终结果,这就是齐次坐标的价值。
许多图形应用涉及到几何变换,主要包括平移、旋转、缩放。以矩阵表达式来计算这些变换时,平移是矩阵相加,旋转和缩放则是矩阵相乘,综合起来可以表示为p‘ = p *m1+ m2(m1旋转缩放矩阵, m2为平移矩阵, p为原向量 ,p‘为变换后的向量)。引入齐次坐标的目的主要是合并矩阵运算中的乘法和加法,表示为p‘ = p*M的形式。即它提供了用矩阵运算把二维、三维甚至高维空间中的一个点集从一个坐标系变换到另一个坐标系的有效方法。
那么齐次坐标是怎么表示点和向量的呢?
那要从齐次坐标的线性代数性质来看:
一维齐次点坐标:
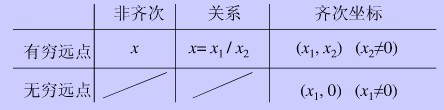
通过上面的定义可以看出,一维的点坐标x的值是齐次坐标中(x1,x2)的关系有 x = x1/x2; 如果x2=1,那么既可以表示为(x,1).其中最特别的点是(0,1)
如果有齐次坐标(x1,x2),由于x2=0的时候表达式分母为零,除法表达式失去意义,因此(x1,0)表示的是一个无穷远点。即忽略其长度属性,那么它就表示一个方向,其中最特别的是(1,0)。
对于 二维齐次点坐标:
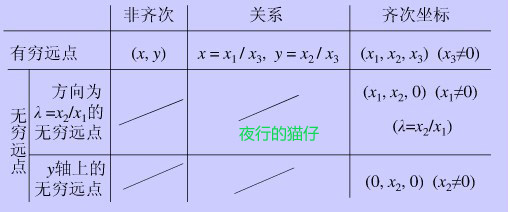
上图表达的意义就是一个点(x,y)他的齐次坐标就是(w*x,w*y,w)其中w不为0
下表列举了一些点的其次表示方式:

任意方向的无穷远点是(x1,x2,0)其中方向为x2/x1。y轴上的无穷远点的表示方式是(0,x2,0)。
再用向量的办法来看看 齐次坐标表示“向量“和“点”的区别:
对于一个向量v以及基oabc,可以找到一组坐标(v1,v2,v3),使得v = v1 a + v2 b + v3 c(1)
现在有一个点P,根据向量的性质,v=p-o (o是原点,v表示从坐标原心指向点p的向量) ,那么代入上式即可得到 p – o = p1 a + p2b + p3c (2)
那么点 p的表达式就是 p = o + p1 a + p2 b + p3 c (3) 那么就会发现,点p的表达式就要比向量v多一个信息。但是o也可以用三维向量来表述,所以
P(1,2,3)和V(1,2,3)从值上而言是完全没有区别的,所以点的就可以用(1,2,3,1)来表示,而向量是(1,2,3,0)。齐次坐标的w为0表示无穷远点,那就只能代表一个方向了。
标签:
原文地址:http://www.cnblogs.com/codingthings/p/4293958.html