标签:
nav寻路一般包含两部分,首先是使用工具根据地图信息生成寻路用的nav mesh,接下来就是在游戏中根据生成的nav mesh来自动寻路。
一般人首先关心的就是寻路方法,所以这里把顺序颠倒下,先说寻路。
一. 使用A*寻找所经过网格路径
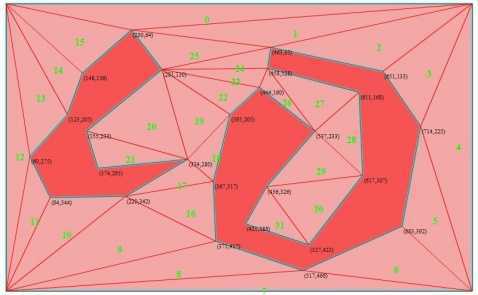
下图为一个已经生成nav网格的地图,深红色区域为不可行走区域,浅红色区域为可以行走的区域。
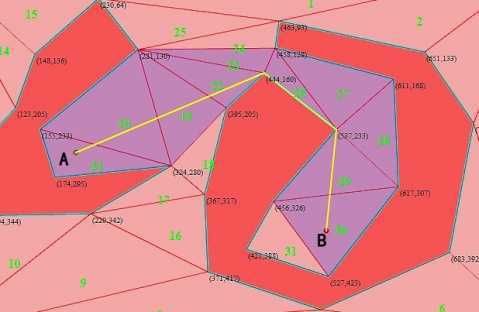
如下图,现在如果要寻找从A点到B点的路径,首先要从所有可行走的网格中找到一条最优的网格路径(图中紫色的网格),然后再根据这些网格生成所需要的路径点。
计算最优网格路径的方法可以使用流行的A*,也可以使用其它方法。A*算法网上很多就不说了,至于三角网格的A*实现因为涉及网格的数据结构会在系列的最后给出。
二. 生成路径点
nav寻路最常用的就是光照射线法了,这个在neoragex2002的blog上有讲,这里就不说了
http://www.cnblogs.com/neoragex2002/archive/2007/09/09/887556.html
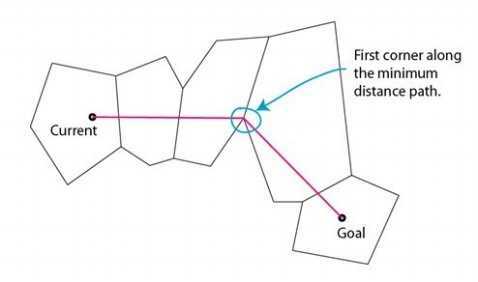
另一种方法就是拐角点法,如下图
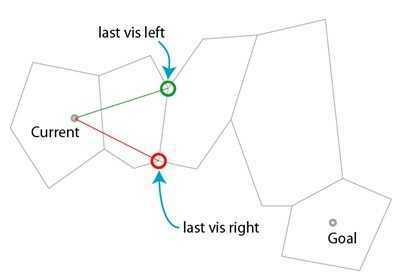
下图的5个凸多边形是已经生成的导航网格,多边形外部的区域为不可行走区域,current为起点,goal为终点,从图中就可以看出最短路径为图中红线,蓝色圈出的点为我们需要找出的点。所有多边形顶点均按逆时针方向存储(这些均在生成导航网格时处理,以后会讲到)。
(1)下图显示出各区域之间的入口,即多边形的临边。由图中可以看出每个临边均为起点穿出该多边形区域的边,故以下称该边为穿出边。
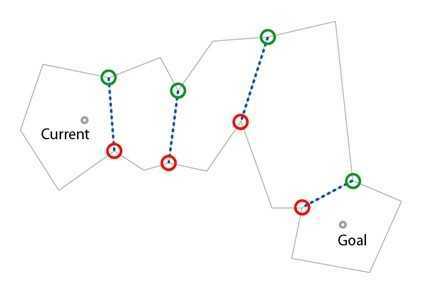
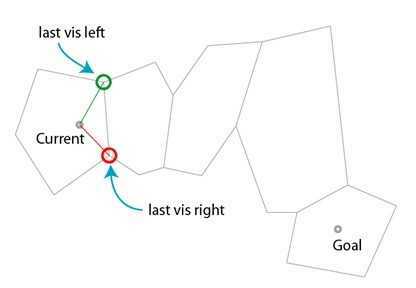
(2)首先找到起始点所在的多边形和穿出边的两个端点,由起点连接两个端点,形成两个线段lineLeft 和lineRight。如下图。绿色圈表示左点,红色表示右点(左点、右点是根据多边形顶点保存顺序而来)。
(3)继续找到下一个穿出边的两个端点,判断新的左点是否在lineLeft 和lineRigh之间,如果在,则更新lineLeft为起点到新左点的线段。
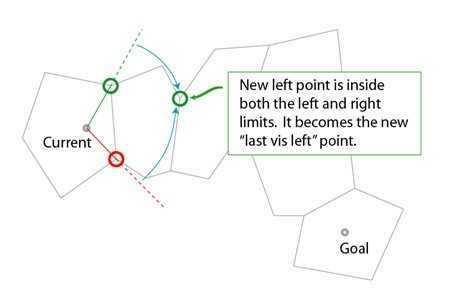
同样处理新穿出边的右点,如下图
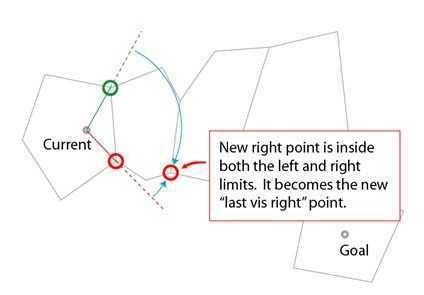
该步最后得到两个新的线段,如下图。
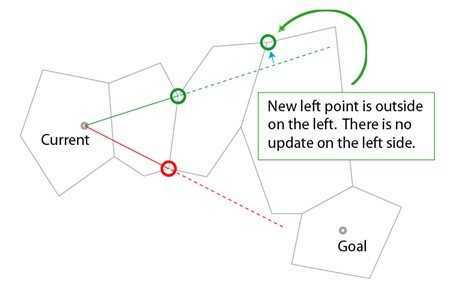
(4) 继续判断下一个穿出边的两个端点,如下图,新的左点在lineLeft和lineRight的外面,则不更新线段。
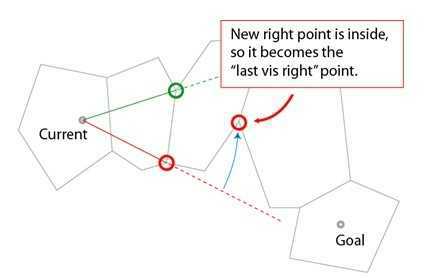
下图说明新的右点在两条直线之间,更新lineRight。
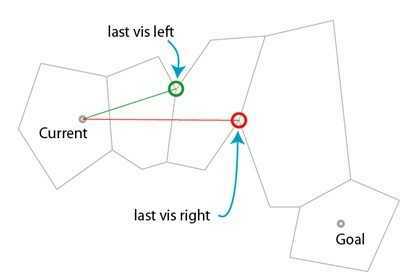
该步最后得到两个新的线段,如下图。
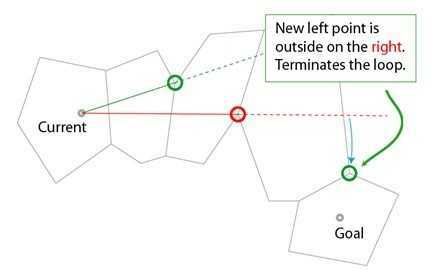
(5) 继续循环判断下一个穿出边的两个端点,该穿出边的两个端点都在lineRight的右侧,表示lineRight的终点即为路径的一个拐角点。
(6) 循环以上步骤都可以找到从起点到终点的一条完整路径。
标签:
原文地址:http://www.cnblogs.com/zdlbbg/p/4301266.html