标签:
在kuka机器人系统的FRAME和POS数据结构包含六个参数:{X ,Y,Z,A,B,C}。这些参数正好对应角度坐标系表示中的六个参数, X,Y,Z,alpha,beta,gama,且alpha=A,beta=B,gama=C。
假设在机器人系统中,{A}是参考坐标系,{B}是工具坐标系,并且相对A的表示为{x,y,z,a,b,c},并且{B}坐标系统有一点BP,那么其在{A}下坐标AP可以表示为:
AP =RxyzBP+APORG,其中 Rxyz=R(a).R(b).R(c),APORG=(x,y,z)
1 固定角坐标系表示法
Rxyz=Rz.Ry.Rx.(x,y,z)

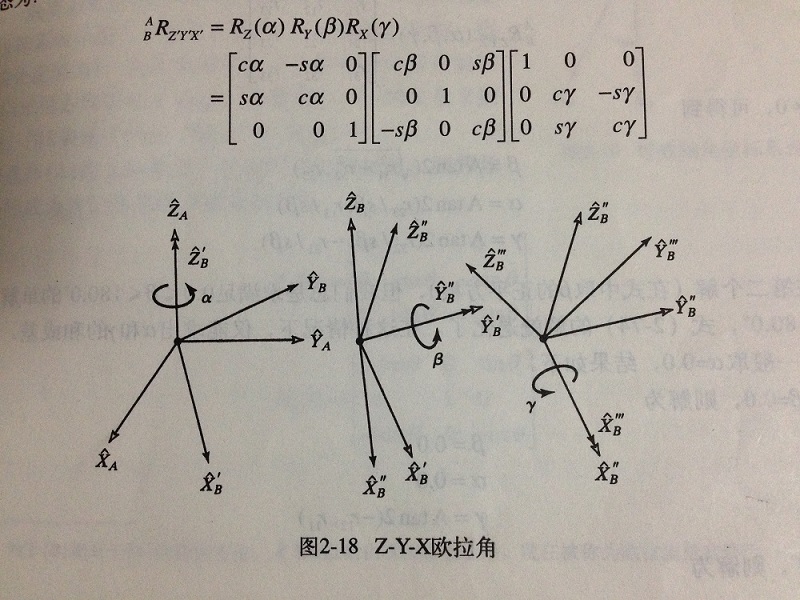
2 欧拉角坐标系表示法
Rz‘y‘x‘=Rz.Ry.Rx.(x,y,z)
3 相互关系
固定角过程可以看做坐标点逐步变换的过程(从右向左计算);与欧拉角过程则是坐标系动态变换的过程(从左向右计算)
4 矩阵表示
(AP,1) =([R,APorg],[0,1])(BP,1)
5 逆解
平移量XYZ容易获取,注意问题在于角度量的计算,省去过程,答案如下
1) B!=+/-90degree时:
B =atan2(-r31,sqrt(r11**2+r21**2))
A = atan2(r21/cB,r11/cB)
C = atan2(r32/cB,r33/cB)
2) B = 90degree 时:
A =0degree
C = atan2(r12,r22)
3)B = -90degree 时:
A = 0degree
C = -atan2(r12,r22)
标签:
原文地址:http://my.oschina.net/u/63375/blog/380221