标签:
之前看了一篇题为"Robust Mesh Watermarking"的论文,查阅资料的时候发现了一篇与之很相似的名为"三维模型数字水印系统的设计与实现"的中文论文,在中文论文的帮助下,总算对网格水印有了一定的了解,简单整理了一下。
由于知识版权保护的需要,数字水印技术应运而生。目前,图像、视频、音频、文本的水印研究已经比较成熟,但是三维模型水印的研究还相对匮乏。然而随着三维模型在网络上传播的日益增多,三维模型知识版权的保护也有了一定的研究意义。由于三维模型自身的特点,对嵌入其中的水印提出了不同于传统水印的要求:
传统的水印一般分为时/空域水印和频域水印。在图像中,空域水印通过直接改变图像的像素来完成(比如早年提出的LSB算法),这类算法复杂度低,效率高,但缺乏健壮性,很容易被去除或破坏;
而频域(也称变换域)则是通过将图像转换到变换域,通过改变变换域中的某些参数来嵌入水印信息。这类变化主要包括DCT、DFT、DWT等。这类算法由于鲁棒性高,得到了普遍的研究。
对于网格而言,没有频域这一表示,因此需要寻找合适的表示方法来类比图像中的频域,本文的作者的出发点就是将图像中的频谱表示方式扩展到网格中来,他们的思路如下:
缺乏进行频率分解的某种自然的参数化方法(无DCT等)à网格多分辨率表示
没有自然的采样 à网格配准和重采样
以下就论文中提到的水印生成、嵌入及提取方法进行整理
水印生成:
以原模型文件MD5加密后的MD5值作为密钥, 将此密钥作为伪随机数生成器的种子, 从均值为0、方差为l 的高斯分布中取 M个随机实数作为水印w = {w0,wl, …… wm-1 },
Key = MD5(models);
W = Random (key)
W ~ N(0,1)
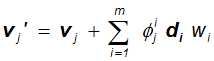
w:水印
Φ:基函数系数
d:水印嵌方向
矩阵形式为: V‘ = V + BW
矩阵X分量形式为:
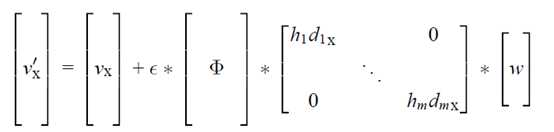
VX‘ :加入水印后网格顶点的X坐标
VX :原始网格顶点X坐标
ε:用户自定义的全局参数,用来控制水印嵌入的深度
Φ:是一个n x m的矩阵,由基函数组成的矩阵,其中矩阵中的项 表示基函数Φi 在顶点j处的标量系数
表示基函数Φi 在顶点j处的标量系数
hdx: 是一个 m x n 的对角矩阵,其中dx是全局位移趋势di的X分量,hi为第i个基函数的"幅度"
W :水印
下面介绍 、di、hi的生成,由于在生成这些值的过程中用到了PM算法,在这之前先简单介绍下渐进网格(Progressive Meshes, PM)算法
、di、hi的生成,由于在生成这些值的过程中用到了PM算法,在这之前先简单介绍下渐进网格(Progressive Meshes, PM)算法
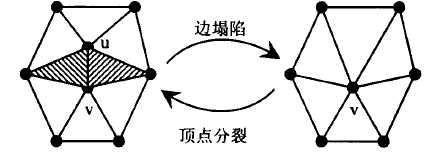
下图为边塌陷与顶点分裂对照图,在左图的网格中,顶点uv之间的边动过边塌陷后被去掉了,u点被合并到了v点,在边塌陷的过程中,记录原顶点和新顶点之间的位置以及顶点之间的连接关系的变动,从而可以通过右图的顶点v点分裂可以分裂出点u,然后恢复出uv之间的边。整个边塌陷去掉的是原始网格中能量较小的边,具体的能量函数此处不做讨论。
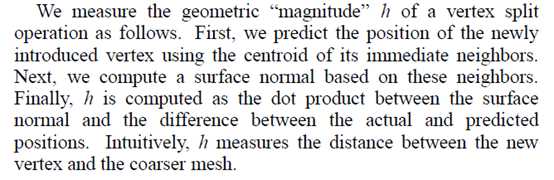
在每次点分裂过程中,计算几何的幅度h:
之后,从若干(作者没有交代具体次数)次点分裂操作中,选出前m次h最大的操作,在这m次操作对应的原始点上生成基函数。
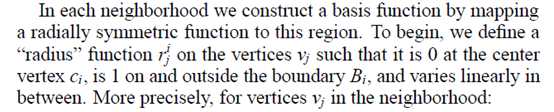
对于每次塌陷,计算"边界"Bi:由塌陷点i的当前邻居经过追踪点分裂操作之后扩展的邻居集合。计算半径rji :对于每个顶点Vj,计算边界内的点Ci到它的距离,当Ci位于边界中心时,半径为0,Ci位于边界上或边界外时,半径为1,其他情况在0到1之间,计算公式如下:
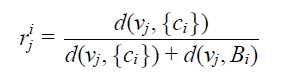
其中,d(v,S)表示v到S中任意一个顶点的距离的最小值,采用的是Dijkstra最短路径算法
(注:对于h和r的计算有点担心理解有偏差,截图附上此部分英文原文)
根据半径r构造基函数,为了得到更好的效果,将基函数构造为墨西哥草帽函数"

之所以选择这个函数是因为这个函数在坐标原点处连续,并且在原点处积分为0,不会引起模型的明显变化。
水印提取:
在进行水印提取之前, 可能需要对受攻击网格进行重定位或者重采样。当三维模型受到相似变换( 平移、旋转、一致放缩) 攻击时, 为了正确地提取水印,需要把模型带回原始的位置和尺度, 这是网格的重定位, 重定位( Registration ) 也称为对准、匹配。
重定位: 重定位可以理解为在两个模型间寻找一个变换, 使得两个模型间的"距离"最小
Get points v* on attacked mesh surface corresponding to original mesh vertices v
Use same basis functions f 1 … f m and hence same matrix B
Resampling choices:
完成上述两步(视情况而定,不一定必须)后,可以从可疑网格中提取水印了,根据下列公式
W* :从可疑模型中提取出的水印
V* :可疑网格中的顶点坐标
V :原始网格中的顶点坐标
解决该最小二乘法问题可以求出W*
计算两者之间的相关性:
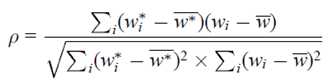

Pfp computed from r and m using Student‘s t-test
Declare watermark present if
Pfp < Pthresh ( e.g. Pthresh = 10-6 )
根据作者的实验,这种水印可以抵抗多种攻击,具有较强的鲁棒性。具体实验结果请参看原文。
标签:
原文地址:http://www.cnblogs.com/scut-linmaojiang/p/4349476.html