标签:
看了 Real-Time Control of Physically Based Simulations using Gentle Forces这篇文章



此处讲讲前馈与反馈: 前馈的意思是,假定预先知道系统的一些特性(此处就是物体要沿着参考轨迹运动),基于这些知识,预先给系统施加一些力。 与前馈相对的是反馈,反馈的做法是根据此时系统实际的运行偏差(此处是在模拟过程中,会遇到突然施加的一些外力),施加力使得系统偏差缩小。 前馈控制是基于"先验知识"的,是事先设计好的(正式物理模拟之前已经算出每步的wff),而反馈控制是基于实际偏差,是一种事后补救方法(在物理模拟的进行过程中,根据当前偏差去修正)。 |
 ,于是
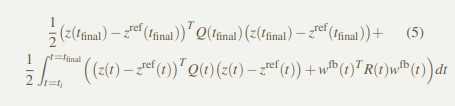
,于是 ,当Δz为0时,由前述定义,wfb也为0
,当Δz为0时,由前述定义,wfb也为0标签:
原文地址:http://www.cnblogs.com/dydx/p/4374675.html