标签:
其主要功能是:在给定的滑动窗口大小下,对每个窗口内的像素值进行快速相加求和
在模式识别领域,Haar特征是大家非常熟悉的一种图像特征了,它可以应用于许多目标检测的算法中。与Haar相似,图像的局部矩形内像素的和、平方和、均值、方差等特征也可以用类似Haar特征的计算方法来计算。这些特征有时会频繁的在某些算法中使用,因此对它的优化势在必行。Boxfilter就是这样一种优化方法,它可以使复杂度为O(MN)的求和,求方差等运算降低到O(1)或近似于O(1)的复杂度,它的缺点是不支持多尺度。
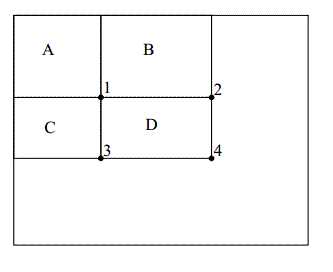
第一个提出Haar特征快速计算方法的是CVPR2001上的那篇经典论文Rapid Object Detection using a Boosted Cascade of Simple Features ,它提出了integral image的概念,这个方法使得图像的局部矩形求和运算的复杂度从O(MN)下降到了O(4)。它的原理很简单:首先建立一个数组A,宽高与原图像相等,然后对这个数组赋值,每个元素的值A[i]赋为该点与图像原点所构成的矩形中所有像素的和。初始化之后,想要计算某个矩形像素和的时候可以采用如下方法:如图D矩形的像素和就等于A[4] – A[2] – A[3] + A[1],共4次运算,即O(4)。Integral Image极大的提高了Haar特征的计算速度,它的优点在于能够快速计算任意大小的矩形求和运算。
Boxfilter的原理有点类似Integral Image,而且比它还要快,但是实现步骤比较复杂。在计算矩形特征之前,Boxfilter与Integral Image都需要对图像进行初始化(即对数组A赋值),不同于Integral Image, Boxfilter的数组A中的每个元素的值是该像素邻域内的像素和(或像素平方和),在需要求某个矩形内像素和的时候,直接访问数组中对应的位置就可以了。因此可以看出它的复杂度是O(1)。
Boxfilter的初始化过程如下:
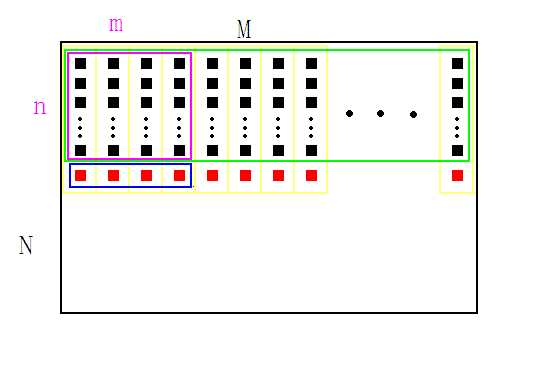
1、给定一张图像,宽高为(M,N),确定待求矩形模板的宽高(m,n),如图紫色矩形。图中每个黑色方块代表一个像素,红色方块是假想像素。
2、开辟一段大小为M的数组,记为buff, 用来存储计算过程的中间变量,用红色方块表示
3、将矩形模板(紫色)从左上角(0,0)开始,逐像素向右滑动,到达行末时,矩形移动到下一行的开头(0,1),如此反复,每移动到一个新位置时,计算矩形内的像素和,保存在数组A中。以(0,0)位置为例进行说明:首先将绿色矩形内的每一列像素求和,结果放在buff内(红色方块),再对蓝色矩形内的像素求和,结果即为紫色特征矩形内的像素和,把它存放到数组A中,如此便完成了第一次求和运算。
4、每次紫色矩形向右移动时,实际上就是求对应的蓝色矩形的像素和,此时只要把上一次的求和结果减去蓝色矩形内的第一个红色块,再加上它右面的一个红色块,就是当前位置的和了,用公式表示 sum[i] = sum[i-1] - buff[x-1] + buff[x+m-1]
5、当紫色矩形移动到行末时,需要对buff进行更新。因为整个绿色矩形下移了一个像素,所以对于每个buff[i], 需要加上一个新进来的像素,再减去一个出去的像素,然后便开始新的一行的计算了。
Boxfilter的初始化过程非常快速,每个矩形的计算基本上只需要一加一减两次运算。从初始化的计算速度上来说,Boxfilter比Integral Image要快一些,大约25%。在具体求某个矩形特征时,Boxfilter比Integral Image快4倍,所谓的4倍其实就是从4次加减运算降低到1次,虽然这个优化非常渺小,但是把它放到几层大循环里面,还是能节省一些时间的。对于那些实时跟踪检测算法,一帧的处理时间要严格在40ms以下,正是这些细小的优化决定了程序的效率,积少成多,聚沙成塔。
下面的程序是Boxfilter的示例代码,谨供参考(C语言)
1 #include <stdio.h> 2 #include <stdlib.h> 3 #include <math.h> 4 #include <opencv2\opencv.hpp> 5 6 void displayImageNewWindow(char *title,CvArr* img){ 7 cvNamedWindow(title,1); 8 cvShowImage(title,img); 9 } 10 void box_filter(IplImage* img,IplImage* result){ 11 //init part 12 CvScalar s; 13 int width = img->width, height = img->height; 14 int m_w = 5,m_h = 5;//window_size 15 int boxwidth = width - m_w, boxheight = height - m_h; 16 int *sum = (int*)malloc(boxwidth *boxheight*sizeof(double)); 17 int *buff= (int*)malloc(width*sizeof(double)); 18 memset(sum,0,boxwidth *boxheight*sizeof(int)); 19 memset(buff,0,width*sizeof(int)); 20 21 //set buff:from 0 to 4 rows,per col 22 int x,y,j; 23 for(y=0; y<m_h; y++){ 24 for(x=0; x<width; x++){ 25 uchar pixel = CV_IMAGE_ELEM(img,uchar,y,x); 26 buff[x] += pixel; 27 //printf("%d:%d\n",x,buff[x]); 28 } 29 } 30 31 for(y=0; y<height - m_h;y++){ 32 int Xsum = 0; 33 34 for(j=0; j<m_w; j++){ 35 Xsum += buff[j];//sum of pixel from (0,0) to (m_h,m_w) (also x = 0) 36 } 37 38 for(x=0; x<boxwidth; x++){ 39 if(x!=0){ 40 Xsum = Xsum-buff[x-1]+buff[m_w-1+x];//Xsum:sum of cols range from x to x+m_w ,rows range from 0 to 4 41 } 42 sum[y*boxwidth + x] = (float) Xsum; 43 } 44 45 for(x=0; x<width; x++){ 46 uchar pixel = CV_IMAGE_ELEM(img,uchar,y,x);//img[y *width + x]; 47 uchar pixel2= CV_IMAGE_ELEM(img,uchar,y+m_h,x);//img[(y+mheight) *width + x]; 48 buff[x] = buff[x] - pixel + pixel2; 49 } 50 } 51 //遍历,得到每个点的和,传给矩阵result 52 for( y=0; y<height-5; y++){ 53 for( x=0; x<width; x++){ 54 if(y>m_h/2 && y<height - m_h/2 && x>m_w/2 && x<width - m_w/2){ 55 s.val[0] = sum[(y - m_h/2) *boxwidth + (x - m_h/2)]/(m_h*m_w); 56 cvSet2D(result,y,x,s); 57 }else{ 58 s.val[0] = -1; 59 cvSet2D(result,y,x,s); 60 }//end else 61 }//end the first for 62 }//end the second for 63 } 64 int main(int argc,char** argv){ 65 IplImage* left = cvLoadImage(argv[1]); 66 IplImage* dst = cvCreateImage(cvGetSize(left),8,1); 67 IplImage* mat = cvCreateImage(cvGetSize(left),8,1); 68 cvZero(mat); 69 cvCvtColor(left,dst,CV_RGB2GRAY); 70 box_filter(dst,mat); 71 displayImageNewWindow("mat",mat); 72 cvWaitKey(); 73 return 0; 74 }
标签:
原文地址:http://www.cnblogs.com/lwl2015/p/4460711.html