标签:style blog class code java javascript width color get int 2014
五一之际,先祝大家五一快乐、其实快乐很简单,工作的人有假放,学习的人也有假放,像我,有假放才有更多的时间学自己想学的东西、51假期学51,可惜没有32假期呀、好了、、言归正传,大家听过吸星大法吧、、在这里、智商和情商比我高的人估计又知道我要说什么了、、没错了、、今天我们来了解“葵花宝典”第STM32篇之输入捕获,也就是上文所讲的“吸星大法”,
那输入捕获可以用来干嘛呢??这个问题问的好,输入捕获可以用来测量脉冲宽度或者测量频率,假如要捕获一个脉冲的高电平脉宽,我们要怎么做呢??别急哈、、接下来我们从头慢慢的分析到脚、、
据老夫所知:STM32的输入捕获,就是通过检测通道上的边沿信号,在边沿信号发生跳变(比如说突然来个上升沿或者下降沿),计数器就把此刻的计数值存放到对应通道的捕获比较寄存器,就这样、、就捕捉到了“美女”、话是这么说、、可操作起来不仅仅是几句话、因为初始化和对捕获的处理是不一样的、所以,为了做好迎接捕获的准备,我们来介绍下几个比较陌生的位:
对于定时器的一些寄存器,在之前的博客都有涉及到,如
TIMx_CR1,
捕获/比较模式寄存器1(TIMx_CCMR1),
捕获/比较使能寄存器(TIMx_CCER),
计数器(TIMx_CNT)
预分频器(TIMx_PSC)
自动重装载寄存器(TIMx_ARR)
捕获/比较寄存器1(TIMx_CCR1)
我们再来看看捕获/比较模式寄存器1(TIMx_CCMR1),由于我们是用TIM5_CH1,所以该寄存器中
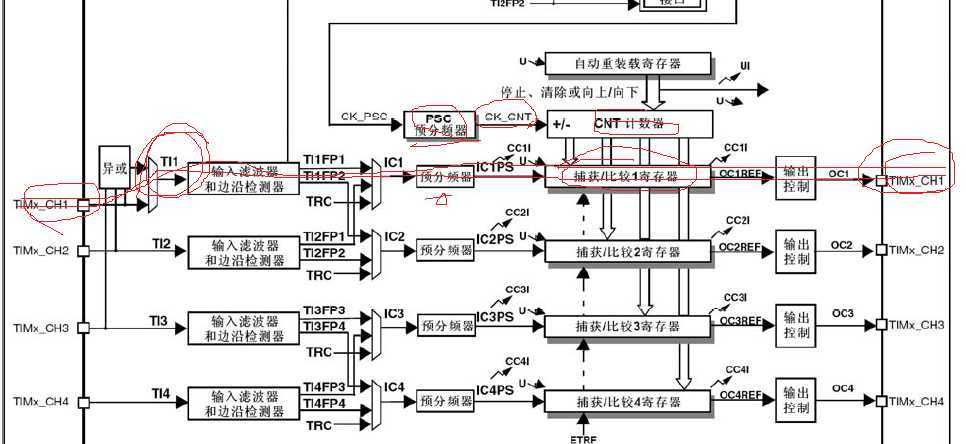
CC1S[1:0]:捕获/比较1选择 (Capture/Compare 1 selection)我们选择01:CC1通道被配置为输入,IC1映射在TI1上;这个知道为啥是TI1吗??请看我那销魂美丽的涂鸦:
这里我们检测高电平的宽度,所以我们检测的时候只要遇到上升沿就触发捕获一次,但是我们要怎么设置呢,请看这几位:
IC1PSC[1:0]:输入/捕获1预分频器 (Input capture 1 prescaler)00:无预分频器,捕获输入口上检测到的每一个边沿都触发一次捕获;
神奇吧,好了,IC1F[3:0]:输入捕获1滤波器 (Input capture 1
filter)(这个就是上图中的输入滤波器,在这里我们不做滤波处理,为什么,请看以下解释)
在这里解释下:数字滤波器由一个事件计数器组成,它记录到N个事件后会产生一个输出的跳变:这个N可以取值具体参考中文手册,意思是说:我采样高电平,只有连续采样到N个电平是高电平的话我才认为是有效的高电平,低于N个我就认为是无效的、在这篇博客里,我们只要是采样到高电平就行,所以这里就不采用数字滤波。
我们来看看这个寄存器 捕获/比较使能寄存器(TIMx_CCER),要使捕获使能,我们就需要设置使能位
CC1E:输入/捕获1输出使能 (Capture/Compare 1 output enable)为0;
对于我们输入捕获后要处理的我们交给我们的中断,所以在这里我们要开启中断使能位
DMA/中断使能寄存器(TIMx_DIER) CC1IE:允许捕获/比较1中断 (Capture/Compare 1 interrupt enable)为1;
介绍了以上几位大神,接下来,我们要怎么个思路呢??==当我们捕获到上升沿时,我们把此时的CNT中的值读出来,然后等待下降沿的到来,这时候要分为两种情况:
第一:下降沿来了,我们就记录此刻CNT的值,(捕获值)然后重复以上动作
第二:下降沿没来,可是这时候定时器的计数值已经到了,也就是要溢出了,这时候要特殊处理下,也就是直接把计数值返回
(注:在这里,要注意捕获值跟计数值的差别,他们是不一样的、)至于为什么不一样,大家可以思考思考、、
所以我们将两次捕获的值相减,(下降沿的值减去上升沿的值)就可以得到高电平的脉宽了、、而这些事,我们都在中断服务函数里处理(中断喔、、想起没??要做什么知道吧、、注意,这时候有两个中断触发:更新中断和捕获中断,更新中断用来处理定时器计数溢出,捕获中断用来处理捕获事件)
接下来,我们看看我们具体的实现步骤
1:开启挂载在ABP1的TIM5时钟,开启挂载在ABP2的GPIOA的时钟,并初始化TIM5和GPIOA,由于这两个初始化前几篇博客有涉及到,故直接贴出代码:

1 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); 2 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5,ENABLE); 3 4 KEY_Init(); //IO我已在按键的函数里初始化了 5 6 TIM_TimeBaseStructure.TIM_Period = arr; 7 TIM_TimeBaseStructure.TIM_Prescaler = psc; 8 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; 9 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; 10 TIM_TimeBaseInit(TIM5, & TIM_TimeBaseStructure);
2、设置TIM_CH1的输入捕获功能,打开“stm3210x.tim.h”我们可以看到
1 typedef struct 2 { 3 4 uint16_t TIM_Channel; /*!< Specifies the TIM channel.设置通道 5 This parameter can be a value of @ref TIM_Channel */ 6 7 uint16_t TIM_ICPolarity; /*!< Specifies the active edge of the input signal.设置输入信号的有效捕获极性 8 This parameter can be a value of @ref TIM_Input_Capture_Polarity */ 9 10 uint16_t TIM_ICSelection; /*!< Specifies the input. 设置映射关系 11 This parameter can be a value of @ref TIM_Input_Capture_Selection */ 12 13 uint16_t TIM_ICPrescaler; /*!< Specifies the Input Capture Prescaler. 设置捕获的分配系数 14 This parameter can be a value of @ref TIM_Input_Capture_Prescaler */ 15 16 uint16_t TIM_ICFilter; /*!< Specifies the input capture filter. 设置数字滤波器的长度 17 This parameter can be a number between 0x0 and 0xF */ 18 } TIM_ICInitTypeDef;
根据我们以上的了解,我们设置,请看以下代码:
1 TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //通道1 2 TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获 3 TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1 4 TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //不分频 5 TIM_ICInitStructure.TIM_ICFilter = 0x0; //不滤波 6 TIM_ICInit(TIM5, &TIM_ICInitStructure);
3、设置中断优先级、在这里比较简单,直接看代码:
1 NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn; 2 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; 3 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; 4 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; 5 NVIC_Init(&NVIC_InitStructure);
4.使能中断并开启定时器
1 2 TIM_ITConfig(TIM5, TIM_IT_Update | TIM_IT_CC1, ENABLE ); 3 4 TIM_Cmd(TIM5, ENABLE);
5、编写中断服务函数
1 u8 TM5_CH1_CAPTURE_STA = 0;//8位0x00~0x80 2 u16 TM5_CH1_CAPTURE_VAL; //捕获高电平后定时器溢出的次数 3 4 void TIM5_IRQHandler(void) 5 { 6 if((TM5_CH1_CAPTURE_STA & 0x80) == 0 ) //未成功捕获,0x80捕获完成 7 { 8 if(TIM_GetITStatus(TIM5, TIM_IT_Update) == SET) //数据更新中断产生 9 { 10 if(TM5_CH1_CAPTURE_STA & 0x40) //已经捕获到高电平 11 { 12 if((TM5_CH1_CAPTURE_STA & 0x3f)==0x3f) //溢出 13 { 14 TM5_CH1_CAPTURE_STA |= 0x80; //强制捕获成功 15 TM5_CH1_CAPTURE_VAL = 0xffff; //此时的计数值 16 } 17 else 18 { 19 TM5_CH1_CAPTURE_STA++; 20 } 21 22 } 23 } 24 if(TIM_GetITStatus(TIM5, TIM_IT_CC1) == SET)//发生捕获 25 { 26 if(TM5_CH1_CAPTURE_STA & 0x40) //成功捕获到一次下降沿,但不是第一次捕获 27 { 28 TM5_CH1_CAPTURE_STA |= 0x80; //捕获成功 29 TM5_CH1_CAPTURE_VAL = TIM_GetCapture1(TIM5);//获取捕获值 30 TIM_OC1PolarityConfig(TIM5, TIM_ICPolarity_Rising);//要设置为上升沿,等待下降沿的来临 31 } 32 else //第一次捕获 33 { 34 TM5_CH1_CAPTURE_STA = 0; 35 TM5_CH1_CAPTURE_VAL = 0; 36 TIM_SetCounter(TIM5, 0); //还没等到下降沿来时把所有的都清零 37 TM5_CH1_CAPTURE_STA |= 0x40; 38 TIM_OC1PolarityConfig(TIM5, TIM_ICPolarity_Falling);//要设置成下降沿,等到上升沿的来临 39 } 40 41 } 42 } 43 TIM_ClearITPendingBit(TIM5, TIM_IT_CC1 | TIM_IT_Update); 44 45 }
6、注意红色标注部分,好好理解刚开始说的计数值和捕获值的区别、还有
TIM_SetCounter(TIM5, 0); //设置计数器寄存器值
TIM_OC1PolarityConfig(TIM5, TIM_ICPolarity_Falling);//设置通道1输入捕获极性
这两个函数是库函数为我们提高的可以单独对通道进行操作的叔叔,非常方便
7、到这里,我们需要在主函数里稍微写下:
1 if(TM5_CH1_CAPTURE_STA & 0x80) 2 { 3 temp = (TM5_CH1_CAPTURE_VAL & 0x3f); 4 temp *= 65536; //计数器为0~65535,也就是65536一次 5 temp += TM5_CH1_CAPTURE_VAL; 6 printf("HIGH is %d\r\n",temp); 7 TM5_CH1_CAPTURE_STA = 0;//这里因为我们在之前的捕获时,若捕获成功则为1,并没有清楚,所以要进行下一次捕获,在这里则需要清零 8 }
8、好了,至于我标题说的小应用,也就是把我们上次PWM的输出给这次的输入捕获,大家通过串口就可以看到高电平的脉宽了。当然,在这篇博客的程序里也需要保留上次PWM输出的程序方可、、
9、大家肚子饿了吧、、吃饭去吧、、
今天五一,还是宅在宿舍学32,也很开心,因为学到了东西、、有假放开心、、有学到知识也开心,即使在学的过程中可能会被烦恼到、、其实快乐也很简单、只是看你怎么把握、、五月的开始、、将继续学stm32、、还有英语六级、、加油、、在这里、有错的地方希望能指教、、我也虚心的向您学习、、
STM32之输入捕获以及小小应用(库),布布扣,bubuko.com
标签:style blog class code java javascript width color get int 2014
原文地址:http://www.cnblogs.com/alvis-jing/p/3702912.html