标签:
在做B帧的运动预测时,有两组参考图像列表(refList0, refList1),需要进行分别前向预测、后向预测。传统的预测方式是:
如果最终得到的是前向+后向的方式,那这就是典型的B帧预测方式。不过这种方式会存在以下的问题:
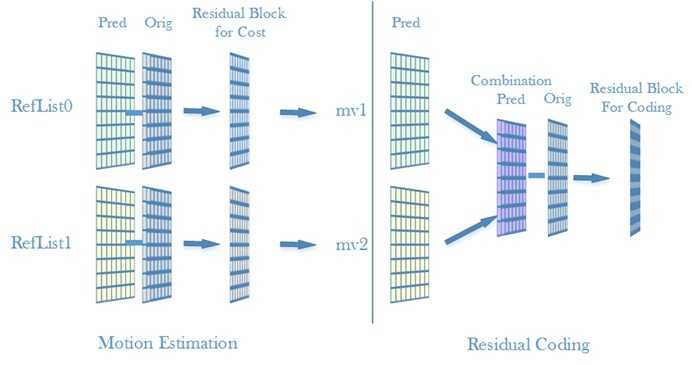
可以看到在运动预测时,预测块的取值方式与最后的残差编码的取值方式不同,那么这种运动预测所得到的mv能否在计算残差编码时使得残差最小?答案不能肯定,因为运动预测时的预测块值与残差编码的预测块值不是一样的。不过对于这种B帧预测的情况,肯定有更好的运动预测方式:令运动预测时的预测块的预测方式与残差编码的预测块的预测方式一致。
Bi-predictive motion search
双向预测运动搜索(Bi-predictive motion search)相对于上述传统类型的运动预测方式,主要的改进是在计算cost时,预测块的取值为前向预测块与后向预测块的一半。
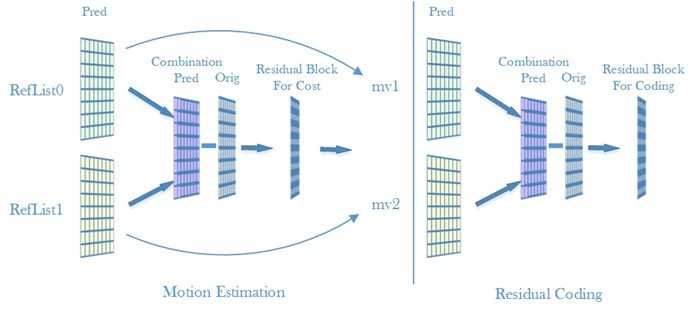
这种运动估计方式,既保持了运动估计与残差编码的一致性,又充分考虑到了前后参考图像的耦合性。
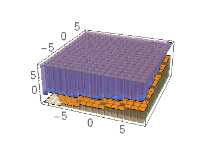
在传统的运动估计中,由于前、后向估计是分开的,但是在残差编码时需要对前、后预测块进行组合,因此如果前、后参考帧关联性很强的话,这种单独的预测方式所得到的组合预测块(combination predicted block)并可能非最佳的预测块,如下图:
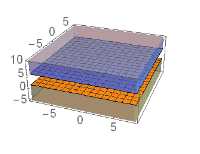
(注:左:前后预测块的像素直方图;右:当前块的像素直方图)
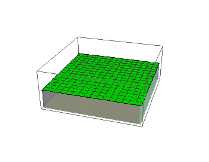
采用双向预测运动搜索后,即使原本在单向预测时被判定为不是最佳的运动向量,如果前、后参考帧的关联性很强的话,也可能由于前后向结合搜索从而得到与当前块差距最小的组合预测块(combination predicted block)
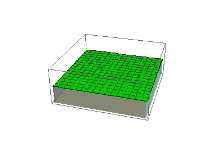
(注:左:前后预测块的像素直方图;右:当前块的像素直方图)
JM18.6实现
首先,是在B slice下才会进行双向预测运动搜索。
既然需要对两个参考图像同时进行预测,那么这两个参考图像应该如何选择呢?在JM18.6中,只对两个参考图像列表的ref0执行这种双向预测运动搜索,并且在进行搜索时,两个参考图像都是ref0,即ref0List[0],ref1List[0]。
/*! *********************************************************************** * \brief * Block motion search *********************************************************************** */ distblk //!< minimum motion cost after search BlockMotionSearch (Macroblock *currMB, //!< Current Macroblock MEBlock *mv_block, //!< Motion estimation information block int mb_x, //!< x-coordinate inside macroblock int mb_y, //!< y-coordinate inside macroblock int* lambda_factor) //!< lagrangian parameter for determining motion cost { ... // Bipred ME consideration: returns minimum bipred cost if (is_bipred_enabled(p_Vid, blocktype) && (ref == 0)) { BiPredBlockMotionSearch(currMB, mv_block, &pred, mb_x, mb_y, lambda_factor); } return min_mcost; } /*! ************************************************************************ * \brief * UMHEXBipredIntegerPelBlockMotionSearch: fast pixel block motion search for bipred mode * this algrithm is called UMHexagonS(see JVT-D016),which includes * four steps with different kinds of search patterns * \author * Main contributors: (see contributors.h for copyright, address and affiliation details) * - Zhibo Chen <chenzhibo@tsinghua.org.cn> * - JianFeng Xu <fenax@video.mdc.tsinghua.edu.cn> * - Xiaozhong Xu <xxz@video.mdc.tsinghua.edu.cn> * \date : * 2006.1 ************************************************************************ */ distblk // ==> minimum motion cost after search UMHEXBipredIntegerPelBlockMotionSearch (Macroblock *currMB, // <-- current Macroblock int list, // <-- current reference list MotionVector *pred_mv1, // <-- motion vector predictor (x|y) in sub-pel units MotionVector *pred_mv2, // <-- motion vector predictor (x|y) in sub-pel units MotionVector *mv1, // <--> in: search center (x|y) / out: motion vector (x|y) - in sub-pel units MotionVector *mv2, // <--> in: search center (x|y) MEBlock *mv_block, // <-- motion vector information int search_range, // <-- 1-d search range in sub-pel units distblk min_mcost, // <-- minimum motion cost (cost for center or huge value) int lambda_factor // <-- lagrangian parameter for determining motion cost ) { ... //maybe wrong,should swap ref1 and ref2 ,not listX[list][ref] and listX[list][0] //ok, only ref == 0 comes into this function StorablePicture *ref_picture1 = currSlice->listX[list + currMB->list_offset][ref]; StorablePicture *ref_picture2 = currSlice->listX[list == 0 ? 1 + currMB->list_offset: currMB->list_offset][ 0 ]; ... }
由于有两个参考图像,但是在进行一次运动搜索时,不可能对两个参考图像同时进行搜索,因此轮询对两张参考图像进行搜索。流程如下:
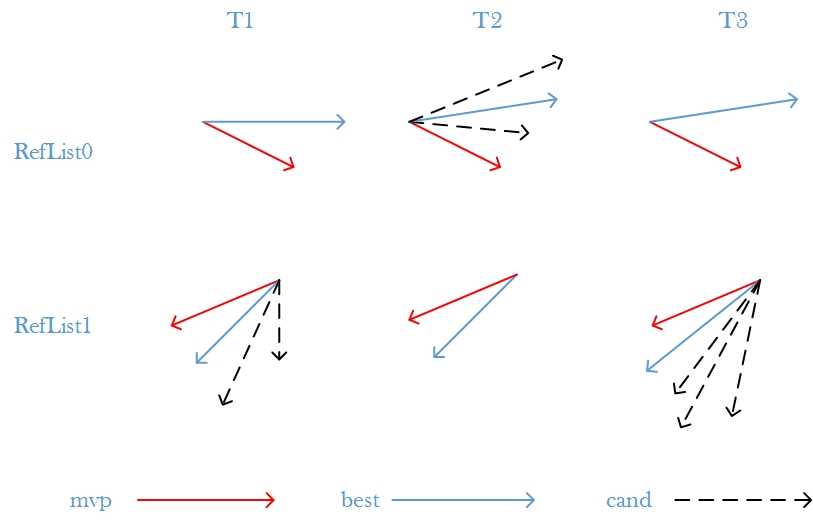
/*! *********************************************************************** * \brief * Bi-predictive motion search *********************************************************************** */ static distblk BiPredBlockMotionSearch(Macroblock *currMB, //!< Current Macroblock MEBlock *mv_block, MotionVector *pred_mv, //!< current list motion vector predictor int mb_x, //!< x-coordinate inside macroblock int mb_y, //!< y-coordinate inside macroblock int* lambda_factor) //!< lagrangian parameter for determining motion cost { VideoParameters *p_Vid = currMB->p_Vid; InputParameters *p_Inp = currMB->p_Inp; Slice *currSlice = currMB->p_Slice; int list = mv_block->list; int i, j; short bipred_type = list ? 0 : 1; MotionVector ***** bipred_mv = currSlice->bipred_mv[bipred_type]; distblk min_mcostbi = DISTBLK_MAX; MotionVector *mv = &mv_block->mv[list]; //1.用从单向运动搜索得到的mv作为候选mv MotionVector bimv, tempmv; MotionVector pred_mv1, pred_mv2, pred_bi; MotionVector *bi_mv1 = NULL, *bi_mv2 = NULL; short iterlist = (short) list; int block_x = (mb_x>>2); int block_y = (mb_y>>2); int blocktype = mv_block->blocktype; int bsx = mv_block->blocksize_x; int bsy = mv_block->blocksize_y; //PixelPos block[4]; // neighbor blocks //get_neighbors(currMB, mv_block->block, mb_x, mb_y, bsx); if (p_Inp->SearchMode[p_Vid->view_id] == UM_HEX) { p_Vid->p_UMHex->bipred_flag = 1; UMHEXSetMotionVectorPredictor(currMB, &pred_bi, p_Vid->enc_picture->mv_info, 0, list ^ 1, mb_x, mb_y, bsx, bsy, mv_block); //2.求出后(前)向mvp } else currMB->GetMVPredictor (currMB, mv_block->block, &pred_bi, 0, p_Vid->enc_picture->mv_info, list ^ 1, mb_x, mb_y, bsx, bsy); if ((p_Inp->SearchMode[p_Vid->view_id] != EPZS) || (p_Inp->EPZSSubPelGrid == 0)) { mv->mv_x = ((mv->mv_x + 2) >> 2) * 4; mv->mv_y = ((mv->mv_y + 2) >> 2) * 4; bimv.mv_x = ((pred_bi.mv_x + 2) >> 2) * 4; bimv.mv_y = ((pred_bi.mv_y + 2) >> 2) * 4; } else { bimv = pred_bi; } //Bi-predictive motion Refinements for (mv_block->iteration_no = 0; mv_block->iteration_no <= p_Inp->BiPredMERefinements; mv_block->iteration_no++) { if (mv_block->iteration_no & 0x01) //4.参考图像交换 { pred_mv1 = *pred_mv; pred_mv2 = pred_bi; bi_mv1 = mv; bi_mv2 = &bimv; iterlist = (short) list; } else { pred_mv1 = pred_bi; pred_mv2 = *pred_mv; bi_mv1 = &bimv; bi_mv2 = mv; iterlist = (short) (list ^ 1); } tempmv = *bi_mv1; PrepareBiPredMEParams(currSlice, mv_block, mv_block->ChromaMEEnable, iterlist, currMB->list_offset, mv_block->ref_idx); // Get bipred mvs for list iterlist given previously computed mvs from other list min_mcostbi = currMB->BiPredME (currMB, iterlist, &pred_mv1, &pred_mv2, bi_mv1, bi_mv2, mv_block, (p_Inp->BiPredMESearchRange[p_Vid->view_id] <<2)>>mv_block->iteration_no, min_mcostbi, lambda_factor[F_PEL]); if (mv_block->iteration_no > 0 && (tempmv.mv_x == bi_mv1->mv_x) && (tempmv.mv_y == bi_mv1->mv_y)) { break; } } if (!p_Inp->DisableSubpelME[p_Vid->view_id]) { if (p_Inp->BiPredMESubPel) { if ( !p_Vid->start_me_refinement_hp ) min_mcostbi = DISTBLK_MAX; PrepareBiPredMEParams(currSlice, mv_block, mv_block->ChromaMEEnable, iterlist, currMB->list_offset, mv_block->ref_idx); min_mcostbi = currMB->SubPelBiPredME (currMB, mv_block, iterlist, &pred_mv1, &pred_mv2, bi_mv1, bi_mv2, min_mcostbi, lambda_factor); } if (p_Inp->BiPredMESubPel==2) { if ( !p_Vid->start_me_refinement_qp ) min_mcostbi = DISTBLK_MAX; PrepareBiPredMEParams(currSlice, mv_block, mv_block->ChromaMEEnable, iterlist ^ 1, currMB->list_offset, mv_block->ref_idx); min_mcostbi = currMB->SubPelBiPredME (currMB, mv_block, iterlist ^ 1, &pred_mv2, &pred_mv1, bi_mv2, bi_mv1, min_mcostbi, lambda_factor); } } clip_mv_range(p_Vid, 0, bi_mv1, Q_PEL); clip_mv_range(p_Vid, 0, bi_mv2, Q_PEL); for (j=block_y; j < block_y + (bsy>>2); j++) { for (i=block_x ; i < block_x + (bsx>>2); i++) { bipred_mv[iterlist ][(short) mv_block->ref_idx][blocktype][j][i] = *bi_mv1; bipred_mv[iterlist ^ 1][(short) mv_block->ref_idx][blocktype][j][i] = *bi_mv2; } } return min_mcostbi; } #define SEARCH_ONE_PIXEL_BIPRED if((iabs(cand.mv_x - center2.mv_x) >> 2) < search_range && (iabs(cand.mv_y - center2.mv_y) >> 2) < search_range) { if(!p_UMHex->McostState[((cand.mv_y - center2.mv_y) >> 2) + search_range][((cand.mv_x-center2.mv_x) >> 2)+search_range]) { mcost = mv_cost (p_Vid, lambda_factor, ¢er1, &pred1); mcost += mv_cost (p_Vid, lambda_factor, &cand, &pred2); if(mcost<min_mcost) { mcost += mv_block->computeBiPredFPel(ref_picture1, ref_picture2, \ //3.组合两个ref来进行cost计算 mv_block, min_mcost - mcost, ¢er1, &cand); p_UMHex->McostState[((cand.mv_y - center2.mv_y) >> 2) + search_range][((cand.mv_x - center2.mv_x) >> 2) + search_range] = 1; if (mcost < min_mcost) { best = cand; min_mcost = mcost; } } } }
在JM18.6中,采用这种运动搜索方式需要满足以下几种条件:1. Bslice, 2. 输入参数指定了BiPredMotionEstimation, 3. 分割模式被指定了bipred_enabled, 4. Ref = 0。
h.264 Bi-Predictive Motion Search
标签:
原文地址:http://www.cnblogs.com/TaigaCon/p/4510457.html