昨天把led灯实现了,今天就玩个蜂鸣器吧,然后那些小的,简单的外围就告一段落了,接着再好好看看ldd3,linux内核等吧。打好基础再来写下自己之所学。
好了,开始蜂鸣器吧。还是一样,先上驱动的代码:
- #include <linux/module.h>
-
- #include <linux/kernel.h>
-
- #include <linux/fs.h>
-
- #include <linux/init.h>
-
- #include <linux/miscdevice.h>
-
- #include <linux/delay.h>
-
- #include <asm/uaccess.h>
-
- #include <linux/device.h>
-
- #include <linux/cdev.h>
-
- #include <asm/irq.h>
-
- #include <mach/gpio.h>
-
- #include <plat/regs-gpio.h>
-
- #include <plat/gpio-cfg.h>
-
- #include <mach/hardware.h>
-
- #include <linux/io.h>
-
-
-
- #define BUZZER_MAJOR 240
-
-
-
- int buzzer_open(struct inode *inode, struct file *filp)
-
- {
-
- unsigned int tmp;
-
- tmp = readl(S3C64XX_GPFCON);
-
- tmp = (tmp & ~(0xc0000000) | (0x40000000)); //set the GPIO output mode
-
- writel(tmp, S3C64XX_GPFCON);
-
- printk("
$buzzeropen
$$$\n");
-
- return 0;
-
- }
-
-
-
- ssize_t buzzer_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos)
-
- {
-
- printk("
buzzerread
$$$\n");
-
- return count;
-
- }
-
-
-
-
-
- ssize_t buzzer_write(struct file *filp, char __user *buf, size_t count, loff_t *f_pos)
-
- {
-
- char mbuf[10];
-
- unsigned int tmp;
-
- copy_from_user(mbuf,buf,count);
-
-
-
- switch(mbuf[0])
-
- {
-
- case 0:
-
- tmp = readl(S3C64XX_GPFDAT);
-
- tmp |= (0x8000);
-
- writel(tmp, S3C64XX_GPFDAT);
-
- break;
-
- case 1:
-
- tmp = readl(S3C64XX_GPFDAT);
-
- tmp &= ~(0x8000);
-
- writel(tmp, S3C64XX_GPFDAT);
-
- break;
-
- default:
-
- break;
-
- }
-
-
-
- printk("
buzzerwrite
$$$\n");
-
- return count;
-
- }
-
-
-
- int buzzer_release(struct inode *inode, struct file *filp)
-
- {
-
- printk("
buzzerrelease
$$$\n");
-
- return 0;
-
- }
-
-
-
- struct file_operations my_fops = {
-
- .owner = THIS_MODULE,
-
- .open = buzzer_open,
-
- .read = buzzer_read,
-
- .write = buzzer_write,
-
- .release = buzzer_release,
-
- };
-
-
-
- static int buzzer_init(void)
-
- {
-
- int rc;
-
- printk("Test buzzer dev\n");
-
- rc = register_chrdev(BUZZER_MAJOR, "buzzer", &my_fops);
-
- if(rc < 0)
-
- {
-
- printk("register %s dev error\n", "buzzer");
-
- return -1;
-
- }
-
- printk("
$ register buzzer dev OK\n");
-
- return 0;
-
- }
-
-
-
- static void buzzer_exit(void)
-
- {
-
- unregister_chrdev(BUZZER_MAJOR, "buzzer");
-
- printk("Good Bye!\n");
-
- }
-
-
-
- MODULE_LICENSE("GPL");
-
- module_init(buzzer_init);
-
- module_exit(buzzer_exit);
和led灯一样,蜂鸣器也是通过控制GPIO口来控制的。原理图如下:
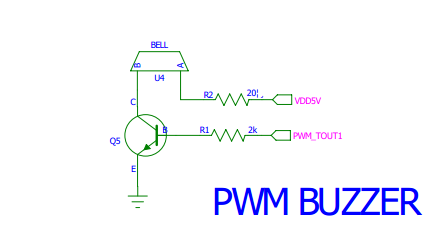
那么pwm_tout1对应的GPIO口是那一个呢?再看原理图:

是GPF15,那么就只要控制GPF15这个GPIO口就好了,详细看看他的寄存器吧

控制寄存器是31-30这两位,因为输出,所以设置为01就好了,具体代码就是:
- tmp = readl(S3C64XX_GPFCON);
-
- tmp = (tmp & ~(0xc0000000) | (0x40000000)); //set the GPIO output mode
-
- writel(tmp, S3C64XX_GPFCON);
然后看看他的数据寄存器吧。和led一样的。好了。

代码基本和led没啥区别。
接着就是makefile了:
然后建个makemod,代码如下
- make -C /home/eastmoon/work/linux2.6.28/ M=`pwd` modules
然后只要source makemod就可以编译成buzzer.ko了
好了,驱动部分搞定了,那么接着就是要写应用程序了
- #include <stdio.h>
-
- #include <sys/types.h>
-
- #include <sys/stat.h>
-
- #include <fcntl.h>
-
-
-
- #define DEVICE "/dev/mybuzzer"
-
-
-
- int main(void)
-
- {
-
- int fd, i;
-
- char buf[10] = {0, 1};
-
- fd = open(DEVICE, O_RDWR);
-
- if(fd < 0)
-
- {
-
- printf("Open /dev/mybuzzer file error\n");
-
- return -1;
-
- }
-
-
-
- while(1)
-
- {
-
- write(fd, &buf[0], 1);
-
- usleep(10000);
-
- write(fd, &buf[1], 1);
-
- usleep(10000);
-
- }
-
- close(fd);
-
- return 0;
-
- }
接着makefile
- CC = /usr/local/arm/4.2.2-eabi/usr/bin/arm-linux-gcc
-
-
-
- buzzerapp:buzzerapp.o
-
- $(CC) -o buzzerapp buzzerapp.o
-
- buzzerapp.o:buzzerapp.c
-
- $(CC) -c buzzerapp.c
-
-
-
- clean :
-
- rm buzzerapp.o
完成,也不知道可不可以成功,那么就下载到板子上看看结果吧:

注册成功。然后接着mknod设备文件

节点也出来了/dev/mybuzzer。就这就运行下应用程序好了
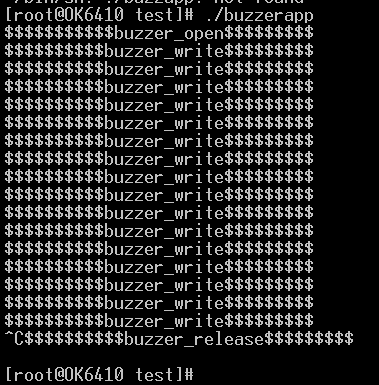
蜂鸣器也发出声音了,OK,搞定了。这样,OK6410,嵌入式linux也算是入了小门了。剩下的就是什么SPI啊,I2C啊,USB,那些总线了,有点小难度的那些。接下里好好看看书吧还是。。。。。。