标签:
这篇博文主要介绍SIFT算法在提取点云图像关键点时的具体用法。
尺度不变特征转换(Scale-invariant feature transform,SIFT)是David Lowe在1999年发表,2004年总结完善。其应用范围包括物体辨识,机器人地图感知与导航、3D模型建立、手势辨识、影像追踪和动作对比。此算法已经申请专利,专利拥有者属于英属哥伦比亚大学。SIFT算法在3D数据上的应用由Flint等在2007年实现。这里所讲的提取点云关键点的算法便是由Flint等人实现的SIFT3D算法。
其实现代如下:

1 // STL 2 #include <iostream> 3 4 // PCL 5 #include <pcl/io/pcd_io.h> 6 #include <pcl/point_types.h> 7 #include <pcl/common/io.h> 8 #include <pcl/keypoints/sift_keypoint.h> 9 #include <pcl/features/normal_3d.h> 10 #include <pcl/visualization/pcl_visualizer.h> 11 #include <pcl/console/time.h> 12 13 /* This examples shows how to estimate the SIFT points based on the 14 * z gradient of the 3D points than using the Intensity gradient as 15 * usually used for SIFT keypoint estimation. 16 */ 17 18 namespace pcl 19 { 20 template<> 21 struct SIFTKeypointFieldSelector<PointXYZ> 22 { 23 inline float 24 operator () (const PointXYZ &p) const 25 { 26 return p.z; 27 } 28 }; 29 } 30 31 int 32 main(int, char** argv) 33 { 34 std::string filename = argv[1]; 35 std::cout << "Reading " << filename << std::endl; 36 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_xyz (new pcl::PointCloud<pcl::PointXYZ>); 37 if(pcl::io::loadPCDFile<pcl::PointXYZ> (filename, *cloud_xyz) == -1) // load the file 38 { 39 PCL_ERROR ("Couldn‘t read file"); 40 return -1; 41 } 42 std::cout << "points: " << cloud_xyz->points.size () <<std::endl; 43 44 // Parameters for sift computation 45 const float min_scale = 0.005f; //the standard deviation of the smallest scale in the scale space 46 const int n_octaves = 6;//the number of octaves (i.e. doublings of scale) to compute 47 const int n_scales_per_octave = 4;//the number of scales to compute within each octave 48 const float min_contrast = 0.005f;//the minimum contrast required for detection 49 50 51 pcl::console::TicToc time; 52 time.tic(); 53 // Estimate the sift interest points using z values from xyz as the Intensity variants 54 pcl::SIFTKeypoint<pcl::PointXYZ, pcl::PointWithScale> sift; 55 pcl::PointCloud<pcl::PointWithScale> result; 56 pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ> ()); 57 sift.setSearchMethod(tree); 58 sift.setScales(min_scale, n_octaves, n_scales_per_octave); 59 sift.setMinimumContrast(min_contrast); 60 sift.setInputCloud(cloud_xyz); 61 sift.compute(result); 62 std::cout<<"Computing the SIFT points takes "<<time.toc()/1000<<"seconds"<<std::endl; 63 std::cout << "No of SIFT points in the result are " << result.points.size () << std::endl; 64 65 66 // Copying the pointwithscale to pointxyz so as visualize the cloud 67 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_temp (new pcl::PointCloud<pcl::PointXYZ>); 68 copyPointCloud(result, *cloud_temp); 69 std::cout << "SIFT points in the result are " << cloud_temp->points.size () << std::endl; 70 // Visualization of keypoints along with the original cloud 71 pcl::visualization::PCLVisualizer viewer("PCL Viewer"); 72 pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> keypoints_color_handler (cloud_temp, 0, 255, 0); 73 pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_color_handler (cloud_xyz, 255, 0, 0); 74 viewer.setBackgroundColor( 0.0, 0.0, 0.0 ); 75 viewer.addPointCloud(cloud_xyz, cloud_color_handler, "cloud");//add point cloud 76 viewer.addPointCloud(cloud_temp, keypoints_color_handler, "keypoints");//add the keypoints 77 viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "keypoints"); 78 79 while(!viewer.wasStopped ()) 80 { 81 viewer.spinOnce (); 82 } 83 84 85 return 0; 86 87 }
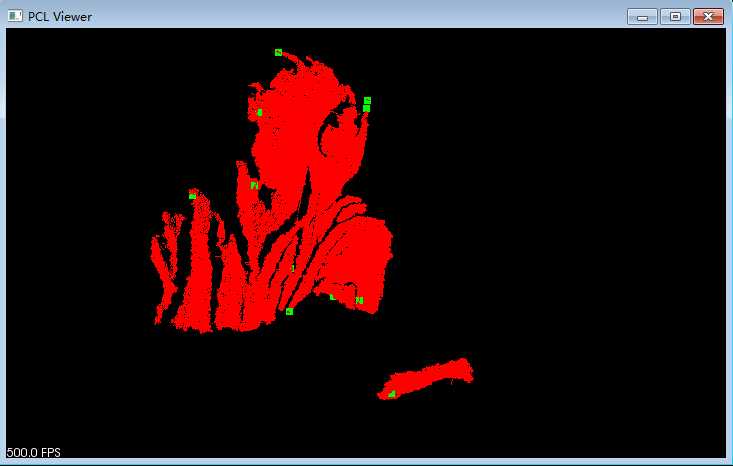
运行结果如下图所示:
标签:
原文地址:http://www.cnblogs.com/freshmen/p/4254573.html
