标签:
1、低功耗模式
在系统或电源复位以后,微控制器处于运行状态。当CPU不需继续运行时,可以利用多种低功耗模式来节省功耗,例如等待某个外部事件时。用户需要根据最低电源消耗、最快速启动时间和可用的唤醒源等条件,选定一个最佳的低功耗模式。
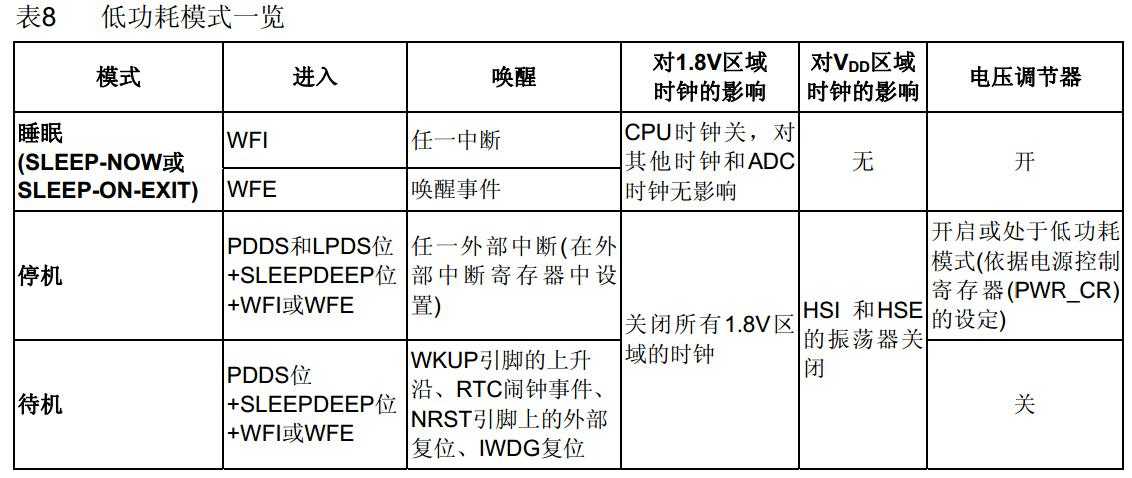
2、STM32F10xxx有三种低功耗模式:
● 睡眠模式(Cortex™-M3内核停止,所有外设包括Cortex-M3核心的外设,如NVIC、系统时钟(SysTick)等仍在运行)
● 停止模式(所有的时钟都已停止)
● 待机模式(1.8V电源关闭)
此外,在运行模式下,可以通过以下方式中的一种降低功耗:
● 降低系统时钟
● 关闭APB和AHB总线上未被使用的外设时钟。
3、外部时钟的控制
在运行模式下,任何时候都可以通过停止为外设和内存提供时钟(HCLK和PCLKx)来减少功耗。为了在睡眠模式下更多地减少功耗,可在执行WFI或WFE指令前关闭所有外设的时钟。
通过设置AHB外设时钟使能寄存器(RCC_AHBENR)、APB2外设时钟使能寄存器(RCC_APB2ENR)和APB1外设时钟使能寄存器(RCC_APB1ENR)来开关各个外设模块的时钟。
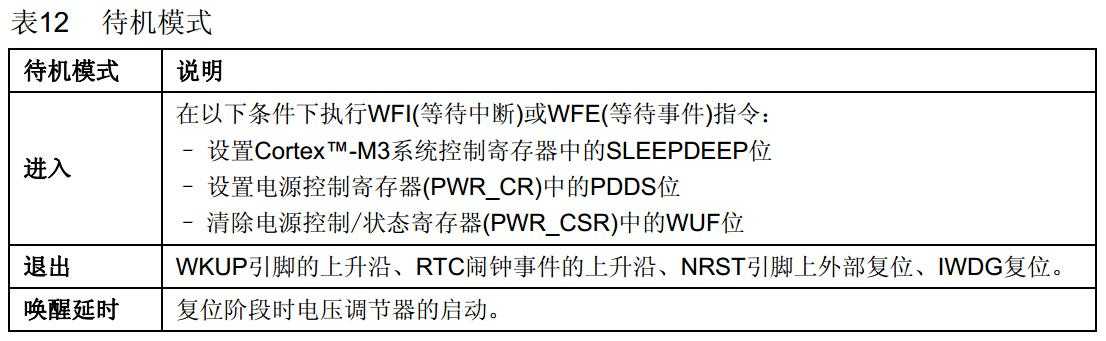
4、待机模式
待机模式可实现系统的最低功耗。该模式是在Cortex-M3深睡眠模式时关闭电压调节器。整个1.8V供电区域被断电。PLL、HSI和HSE振荡器也被断电。SRAM和寄存器内容丢失。只有备份的寄存器和待机电路维持供电
5、退出待机模式
当一个外部复位(NRST引脚)、IWDG复位、WKUP引脚上的上升沿或RTC闹钟事件的上升沿发生时,微控制器从待机模式退出。从待机唤醒后,除了 电源控制/状态寄存器(PWR_CSR),所有寄存器被复位。从待机模式唤醒后的代码执行等同于复位后的执行(采样启动模式引脚、读取复位向量等)。电源控制/状态寄存器(PWR_CSR)将会指示内核由待机状态退出。
待机模式下的输入/输出端口状态在待机模式下,所有的I/O引脚处于高阻态,除了以下的引脚: ● 复位引脚(始终有效) ● 当被设置为防侵入或校准输出时的TAMPER引脚 ● 被使能的唤醒引脚
6、代码例程:

1 /************************************************************************************************************************************* 2 * 3 * 文件名称:main.c 4 * 文件功能:主函数文件 5 * 6 ***************************************************************************************************************************************/ 7 8 #include "pbdata.h"//调用自定义公共函数库 9 10 11 /********************************************************************************* 12 * 13 * 初始化操作 14 * 15 *********************************************************************************/ 16 void RCC_Configuration(void);//系统时钟初始化函数声明 17 void GPIO_Configuration(void);//GPIO初始化函数声明 18 void NVIC_Configuration(void);//中断优先级配置函数声明 19 void USART_Configuration(void);//串口配置函数声明 20 void Sys_Standby(void);//进入待机模式+9 21 22 23 24 25 /******************************************************************************** 26 * 27 * 函数名称:main(void) 28 * 函数功能:主函数 29 * 函数说明:不能用void定义主函数 30 * 31 ********************************************************************************/ 32 int main(void)//void不能void定义主函数 33 { 34 35 RCC_Configuration(); //系统时钟初始化 36 37 GPIO_Configuration();//端口初始化 38 39 USART_Configuration();//串口配置 40 41 NVIC_Configuration();//中断优先级配置 42 43 44 45 while(1) 46 { 47 printf("liubo\n"); 48 49 delay_ms(3000); 50 51 printf("last:5s\n");//先倒计时 52 delay_ms(1000); 53 printf("last:4s\n"); 54 delay_ms(1000); 55 printf("last:3s\n"); 56 delay_ms(1000); 57 printf("last:2s\n"); 58 delay_ms(1000); 59 printf("last:1s\n"); 60 delay_ms(1000); 61 printf("enter Standby state:\n");//进入待机状态 62 Sys_Standby(); 63 64 } 65 66 } 67 68 69 70 71 /******************************************************************************** 72 * 73 * 函数名称:RCC_Configuration(void) 74 * 函数功能:系统时钟高初始化函数 75 * 76 ********************************************************************************/ 77 void RCC_Configuration(void)//系统时钟高初始化函数 78 { 79 80 SystemInit();//系统初始化 81 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//串口对应GPIO时钟使能 82 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//串口时钟使能 83 RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//引脚复用 84 85 } 86 87 88 89 /******************************************************************************* 90 * 91 * 函数名称:GPIO_Configuration(void) 92 * 函数功能:GPIO初始化函数 93 * 94 ********************************************************************************/ 95 96 void GPIO_Configuration(void)//GPIO初始化函数 97 { 98 99 100 /*串口引脚配置*/ 101 GPIO_InitTypeDef GPIO_InitStructure;//定义一个GPIO设置的结构体变量 102 103 /*输出引脚配置*/ 104 /*结构体变量赋值*/ 105 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;////引脚配置TX 106 GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;//配置频率 107 GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//发送要配置成复用推挽输出 108 /*对应的GPIO初始化*/ 109 GPIO_Init(GPIOA,&GPIO_InitStructure); 110 111 112 /*输入引脚配置*/ 113 /*结构体变量赋值*/ 114 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;////引脚配置RX 115 GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;//接收引脚配置成浮空输入 116 /*对应的GPIO初始化*/ 117 GPIO_Init(GPIOA,&GPIO_InitStructure); 118 119 120 } 121 122 123 /**************************************************************************** 124 * 125 * 函数名称:NVIC_Configuration(void) 126 * 函数功能:配置中断优先级 127 * 128 ****************************************************************************/ 129 130 void NVIC_Configuration(void) 131 { 132 NVIC_InitTypeDef NVIC_InitStructure; //定义一个优先级配置结构体变量 133 134 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);//分组 135 136 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; 137 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//抢断优先级 138 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//响应优先级 139 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能 140 141 NVIC_Init(&NVIC_InitStructure);//初始化 142 } 143 144 145 /********************************************************************************* 146 * 147 * 函数名称: 148 * 函数功能:串口配置函数 149 * 150 *********************************************************************************/ 151 void USART_Configuration(void) 152 { 153 /*定义串口配置结构体变量*/ 154 USART_InitTypeDef USART_InitStructure;//定义一个串口配置结构体变量 155 156 157 /*结构体变量赋值*/ 158 USART_InitStructure.USART_BaudRate = 9600;//波特率9600 159 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//位宽,8位 160 USART_InitStructure.USART_StopBits = USART_StopBits_1;//停止位1 161 USART_InitStructure.USART_Parity = USART_Parity_No;//不奇偶校验 162 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//流控禁止 163 USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;//发送使能 164 165 166 /*发送串口配置初始化*/ 167 USART_Init(USART1, &USART_InitStructure); 168 169 170 /*打开串口接收中断*/ 171 USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//当接收到数据时,会产生中断 172 173 174 /*打开串口*/ 175 USART_Cmd(USART1,ENABLE);//串口使能,打开 176 177 /*清空中断标志位*/ 178 USART_ClearFlag(USART1,USART_FLAG_TC); 179 } 180 181 182 183 184 185 /******************************************************************************** 186 * 187 * 函数名称:Sys_Standby(void) 188 * 函数功能:进入待机模式函数 189 * 190 ********************************************************************************/ 191 192 //待机模式 193 void Sys_Standby(void) 194 { 195 NVIC_SystemLPConfig(NVIC_LP_SLEEPDEEP,ENABLE);//选择待机模式 196 197 RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR,ENABLE);//使能PWR外设时钟 198 199 PWR_WakeUpPinCmd(ENABLE);//使能唤醒管脚 200 201 PWR_EnterSTANDBYMode();//进入待机模式 202 203 } 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232
1 /*pbdata.h*/ 2 /*************************************************************************************************** 3 * 4 * 文件名称:pbdata.h 5 * 文件功能:自定义的函数和全局变量的声明头文件 6 * 7 ***************************************************************************************************/ 8 9 #ifndef _pbdata_H 10 #define _pbdata_H 11 12 13 14 15 16 /******************************************************************** 17 * 18 * 调用的头文件放在这里 19 * 20 ********************************************************************/ 21 #include "stm32f10x.h" 22 23 24 #include "stm32f10x_rcc.h" 25 #include "stm32f10x_gpio.h" 26 #include "misc.h" 27 #include "stm32f10x_adc.h" 28 #include "stm32f10x_bkp.h" 29 #include "stm32f10x_can.h" 30 #include "stm32f10x_cec.h" 31 #include "stm32f10x_dac.h" 32 #include "stm32f10x_dbgmcu.h" 33 #include "stm32f10x_dma.h" 34 #include "stm32f10x_exti.h" 35 #include "stm32f10x_flash.h" 36 #include "stm32f10x_fsmc.h" 37 #include "stm32f10x_i2c.h" 38 #include "stm32f10x_iwdg.h" 39 #include "stm32f10x_pwr.h" 40 #include "stm32f10x_rtc.h" 41 #include "stm32f10x_sdio.h" 42 #include "stm32f10x_spi.h" 43 #include "stm32f10x_tim.h" 44 #include "stm32f10x_usart.h" 45 #include "stm32f10x_wwdg.h" 46 47 48 #include "stdio.h" 49 50 51 52 53 /******************************************************************** 54 * 55 * 自定义全局变量声明 56 * 57 ********************************************************************/ 58 extern u8 dt; 59 60 61 62 63 64 /******************************************************************** 65 * 66 * 自定义全函数声明 67 * 68 ********************************************************************/ 69 void delay(u32 nCount); 70 void delay_us(u32 nus); 71 void delay_ms(u16 nms); 72 int fputc(int ch,FILE *F); 73 74 75 76 #endif
1 /**************************************************************************************************************** 2 * 3 * 文件名称:pbdata.c 4 * 文件功能:自定义函数或者全局变量的初始化 5 * 6 ****************************************************************************************************************/ 7 8 /*头文件声明*/ 9 #include "pbdata.h" 10 11 12 13 14 /******************************************************************************************** 15 * 16 * 自定义全局变量 17 * 18 ********************************************************************************************/ 19 u8 dt=0; 20 21 22 23 24 25 /****************************************************************************************** 26 * 27 * 自定义函数 28 * 29 ******************************************************************************************/ 30 31 32 33 /************************************************** 34 * 35 * 函数名称:delay_us(u32 nus) 36 * 函数功能:微秒延时函数 37 * 输入参数:输入值为延时us 38 * 39 ***************************************************/ 40 void delay_us(u32 nus) 41 { 42 u32 temp; 43 SysTick->LOAD = 9*nus;//载入初值,72M/8=9M,也就是1/9us,9*1/9us,所以是执行9次 44 SysTick->VAL=0X00;//清空计数器,清空后,就自动设置自己设定的计数器的值 45 SysTick->CTRL=0X01;//使能,减到零动作(不发生中断),采用外部时钟 46 47 do 48 { 49 temp=SysTick->CTRL;//标志位,等到一直减到0 50 }while((temp&0x01)&&(!(temp&(1<<16))));//等待时间到达 51 52 SysTick->CTRL=0x00; //关闭计数器 53 SysTick->VAL =0X00; //清空计数器 54 } 55 56 57 58 59 60 61 62 /*************************************************** 63 * 64 * 函数名称:delay_ms(u16 nms) 65 * 函数功能:毫秒级延时 66 * 输入参数:输入值位延时ms 67 * 68 ****************************************************/ 69 void delay_ms(u16 nms) 70 { 71 u32 temp; 72 SysTick->LOAD = 9000*nms;//载入初值,72M/8=9M,也就是1/9us,9*1/9us,所以是执行9000次 73 SysTick->VAL=0X00;//清空计数器,清空后,就自动设置自己设定的计数器的值 74 SysTick->CTRL=0X01;//使能,减到零动作(不发生中断),采用外部时钟 75 76 do 77 { 78 temp=SysTick->CTRL;//标志位,等到一直减到0 79 }while((temp&0x01)&&(!(temp&(1<<16))));//等待时间到达 80 81 SysTick->CTRL=0x00; //关闭计数器 82 SysTick->VAL =0X00; //清空计数器 83 } 84 85 86 87 /**************************************************** 88 * 89 * 重定义printf函数部分 90 * 91 ****************************************************/ 92 int fputc(int ch,FILE *F) 93 { 94 95 USART_SendData(USART1,(u8)ch); 96 97 while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);//等待发送完成,判断标志位 98 99 return ch; 100 }
7、工程下载:
http://download.csdn.net/detail/a1181803348/8761503
标签:
原文地址:http://www.cnblogs.com/STM32bo/p/4544708.html
