标签:des style blog http 数据 2014
$\bf 摘要$: 本文给出了王大凯等编的《图像处理中的偏微分方程方法》第 6.2 节的详细论述.
$\bf 关键词$: 图像复原; TV 模型; matlab 编程
1. 前言
图像在形成、传输和存储过程中中, 图像质量可能退化 (degradation). 而退化的图像可用数学模型: $$\bee\label{1:d} u_0=h_d*f+n \eee$$来描述, 其中
(1)$f(x,y)$ 是理想的图像;
(2)$h_d(x,y)$ 是成像系统的点弥散函数 (point-spread function, PSF), 理想的 PSF 为 $\delta(\cdot)$, 实际的 PSF 分为
(a)由散焦 (电子束扫描的点大小改变) 引起的模糊: $$\bex h_d(x,y)=e^{-\frac{x^2+y^2}{2\sigma^2}}, \eex$$
(b)大气湍流 (小尺度的扰动产生大尺度的运动状态的改变) 的影响: $$\bex \calF(h_d)(u,v)\equiv H(u,v)=e^{-k(u^2+v^2)^\frac{5}{6}}, \eex$$
(c)运动模糊: $$\bex H_d(u,v)=T\frac{\sin[\pi (au+bv)]}{\pi (au+bv)}e^{-j\pi (au+bv)}, \eex$$ 其中 $T$ 是快门 (shutter, 控制照相机曝光时间的机件) 时间, $(a,b)$ 是物体的速度;
(3)$n(x,y)$ 是加性噪声, 本文中采用以均值为零, 方差为 $\sigma$ 的 Gaussian 白噪声 (white gaussian noise, wgn).
图像复原 (image restoration) 就是根据已记录下的 $u_0$ 来恢复原始 $f$. 传统的复原方法主要是逆滤波 (inverse filtering) 或称去卷积 (deconvolution) (比如 Wiener 的去卷积滤波理论) 与有约束的最小二乘法.
现在简单介绍一下与 PDE 复原相关的有约束最小二乘法. 它的出发点是: 输出图像在满足 $$\bex \iint_\Omega \sev{h_d*u-u_0}^2\rd x\rd y=\const \eex$$ 的约束下 (输出图像比待处理图像更不模糊(图像处理的要求么), 所以模糊一下应该与待处理图像相差无几) 应尽可能光滑.
这样, 光滑的量度就是最小二乘法的关键. 传统的方法是以 $\dps{\iint_\Omega \sev{\n u}^2\rd x\rd y}$ 作为光滑量度, 但它与图像的固有特征——存在突变 (边缘)——不相容. 为此, Rudin, Osher 和 Fatime 首先提出以 $\dps{\iint_\Omega \sev{Du}}$ 作为光滑量度, 开创了全变分 (total variation, TV) 复原方法, 或称 ROF 方法. TV 方法的有点在于 BV 函数容许跳跃, 而二值图像 (或更一般的分片常数图像) 就为其一成员 ($\dps{\chi_E\in BV(\Omega)}$ 但 $\dps{\chi_E\not\in W^{1,2}(\Omega)}$).
2. 模型的建立
以 $\dps{\iint_\Omega\sev{Du}}$ 作为光滑量度的 TV 模型可表达为求以下泛函 $$\bee\label{2:E} E(u)=\iint_\Omega \sev{Du}+\frac{\lambda}{2} \iint_\Omega \sev{h_d*u-u_0}^2\rd x\rd y, \eee$$其中 $\lambda$ 是 Lagrange 乘子. 利用公式 $$\bex h(x)=h(-x)\ra \int f\cdot (g*h) =\int (f*h)\cdot g \eex$$ 我们知 \eqref{2:E} 之 Euler-Lagrange 方程为 $$\bee\label{2:s} -\Div\sex{\frac{\n u}{\sev{\n u}}} +\lambda h_d*\sex{h_d*u-u_0}=0, \eee$$对应的梯度下降流 (gradient descent flow, GDF) 为 $$\bee\label{2:e} \frac{\p u}{\p t}=\Div\sex{\frac{\n u}{\sev{\n u}}} -\lambda h_d*\sex{h_d*u-u_0}. \eee$$用 PDE \eqref{2:e} 来图像复原, 虽然有其优势 (相对于以 $\dps{\iint_\Omega\sev{\n u}^2\rd x\rd y}$ 为光滑量度的最小二乘法), 但
(1)一方面, 其时间步长须小, 而 CPU 开销大;
(2)另一方面, 不完全符合图像处理的形态学原则, 会产生阶梯 (staircase) 效应 ($\dps{\chi_E\in BV(\Omega)}$). 为了缓解上述两缺陷, Marquina 和 Osher 提出了如下改进: $$\bee\label{2:e_im} \frac{\p u}{\p t}=\sev{\n u}\Div\sex{\frac{\n u}{\sev{\n u}}} -\lambda \sev{\n u} h_d*\sex{h_d*u-u_0}. \eee$$\eqref{2:e_im} 的优势在于
(1)$\dps{\sev{\n u}\Div\sex{\frac{\n u}{\sev{\n u}}}=\kappa\sev{\n u}}$ 是非线性扩散项, 其与第二项——Hamilton-Jacobi (HJ) 项相结合, 数值计算所需的 CFL 条件放宽 (扩散项采用中心差分 (central difference), 而 HJ 项采用迎风格式 (upwind scheme));
(2)\eqref{2:e_im} 在单调灰度变换下保持不变, 而形态学原则近似满足(\eqref{2:e_im} 每项均含 $\sev{\n u}$, 这是图像的固有特征——边缘), 阶梯效应得以缓解.
3. 数值算法
\eqref{2:e_im} 可直接用显式方案 (explicit scheme) 求解: $$\bex u^{n+1}_{ij} =u^n_{ij} +\lap t\sex{P^n_{ij}+Q^n_{ij}}, \eex$$ 其中
(1)$P^n_{ij}$ 是扩散项中心差分的结果: $$\bex P^n_{ij} =\frac{ \sex{D^{(0)}_yu^n_{ij}}^2\cdot D^{(0)}_{xx}u^n_{ij} -2D^{(0)}_xu^n_{ij}\cdot D^{(0)}_yu^n_{ij} \cdot D^{(0)}_{xy}u^n_{ij} +\sex{D^{(0)}_xu^n_{ij}}^2 \cdot D^{(0)}_{yy}u^n_{ij} }{ \sex{D^{(0)}_xu^n_{ij}}^2 +\sex{D^{(0)}_yu^n_{ij}}^2 +\ve }; \eex$$
(2)$Q^n_{ij}$ 是 HJ 项迎风格式的结果: $$\bex Q^n_{ij} &=&-\lambda \beta^n_{ij}\sev{\delta u^n_{ij}}, \eex$$ $$\bex \beta^n_{ij}=\sex{h_d*\sex{h_d*u^n-u_0}}_{ij}, \eex$$ $$\bex \sev{\delta u^n_{ij}} &=&\max\sex{\beta^n_{ij},0}\\ & & \cdot\sqrt{\max\sex{D^{(-)}_xu^n_{ij},0}^2 +\min\sex{D^{(+)}_xu^n_{ij}}^2 \max\sex{D^{(-)}_yu^n_{ij},0}^2 +\min\sex{D^{(+)}_yu^n_{ij}}^2 }\\ & &+\min\sex{\beta^n_{ij},0}\\ & & \cdot\sqrt{\min\sex{D^{(-)}_xu^n_{ij},0}^2 +\max\sex{D^{(+)}_xu^n_{ij}}^2 \min\sex{D^{(-)}_yu^n_{ij},0}^2 +\max\sex{D^{(+)}_yu^n_{ij}}^2 }. \eex$$
4. 数值试验
用如下的 matlab 代码:
clear all;
close all;
clc;
N=1000;%迭代次数设置
D=200;%每迭代200次输出当前图像
nn=3;%输出图像个数初始化
I0=imread(‘lenna.bmp‘);
I0=double(I0);
figure(1);imshow(uint8(I0));
[ny,nx]=size(I0);
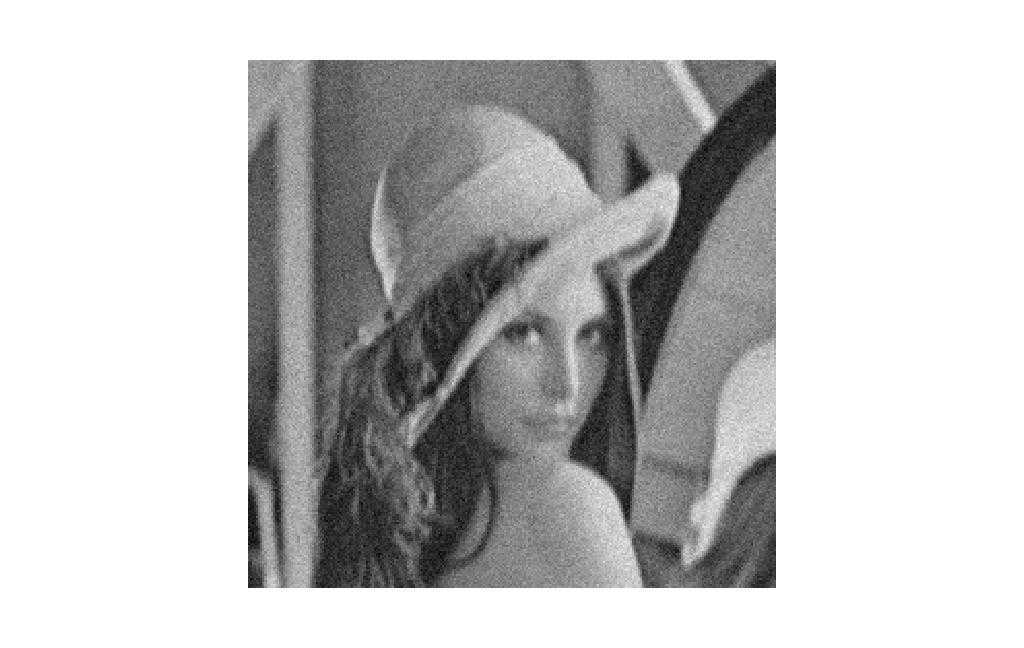
I0=gauss(I0,7,3);%gaussian 加噪
I0=I0+10*randn([ny,nx]);%加性噪声
figure(2);imshow(uint8(I0));
lambda=0.2;%Lagrange 乘子
dt=0.01;%时间步长
I=I0;%图像初始化,存储迎风方案结果
J=I0;%图像初始化,存储 Roe 迎风方案结果
%%迭代开始
for n=1:N
Ix=0.5*(I(:,[2:nx,nx])-I(:,[1,1:nx-1]));
Iy=0.5*(I([2:ny,ny],:)-I([1,1:ny-1],:));
gradient=Ix.^2+Iy.^2+eps;
Ix_back=I-I(:,[1,1:nx-1]);
Ix_forward=I(:,[2:nx,nx])-I;
Iy_back=I-I([1,1:ny-1],:);
Iy_forward=I([2:ny,ny],:)-I;
Ixx=(I(:,[2:nx,nx])-I)-(I-I(:,[1,1:nx-1]));
Ixy=0.25*((I([2:ny,ny],[2:nx,nx])-I([2:ny,ny],[1,1:nx-1]))...
-(I([1,1:ny-1],[2:nx,nx])-I([1,1:ny-1],[1,1:nx-1])));
Iyy=(I([2:ny,ny],:)-I)-(I-I([1,1:ny-1],:));
%%中心差分
diffusion=(Iy.^2.*Ixx-2*Ix.*Iy.*Ixy+Ix.^2.*Iyy)./gradient;
%%迎风方案
beta=gauss(gauss(I,7,3)-I0,7,3);
upwind=max(beta,0).*...
sqrt(...
max(Ix_back,0).^2+min(Ix_forward,0).^2 ...
+max(Iy_back,0).^2+min(Iy_forward,0).^2 ...
)...
+min(beta,0).*...
sqrt(...
min(Ix_back,0).^2+max(Ix_forward,0).^2 ...
+min(Iy_back,0).^2+max(Iy_forward,0).^2 ...
);
%%Roe 迎风格式
upwind_x=Ix_back;
upwind_x(beta.*Ix<0)=Ix_forward(beta.*Ix<0);
upwind_y=Iy_back;
upwind_y(beta.*Iy<0)=Iy_forward(beta.*Iy<0);
Roe_upwind=beta.*sqrt(upwind_x.^2+upwind_y.^2);
%%更新图像
I=I+dt*(diffusion-lambda*upwind);
J=J+dt*(diffusion-lambda*Roe_upwind);
%%输出图像
if mod(n,D)==0
figure(nn);
subplot(1,2,1);imshow(uint8(I));
subplot(1,2,2);imshow(uint8(J));
nn=nn+1;
end
end
就可对 Lenna 图像加噪并复原, 见下图:





这里我们调用了以下 matlab 函数对原图像进行 gaussian 加噪:
function Ig=gauss(I,window,sigma)
%%函数 guass() 实现 guassian 平滑滤波
%%参数说明
%%I --- 待平滑函数
%%window --- gaussian 核大小(奇数)
%%simga --- gaussian 方差
%%Ig --- 返回 guassian 平滑后的图像
[ny,nx]=size(I);
half_window=(window-1)/2;%方便取中心
if ny<half_window
x=(-half_window:half_window);
filter=exp(-x.^2/(2*sigma));%一维 guassian 函数
filter=filter/sum(filter);%归一化
%%图像扩展
xL=mean(I(:,[1:half_window]));
xR=mean(I(:,[nx-half_window+1,nx]));
I=[xL*ones(ny,half_window) I xR*ones(ny,half_window)];
%扩展成 nx + window -1 列
Ig=conv(I,filter);
%形成 (nx + window -1) + (window) -1 = nx + 2 (window-1) 列
Ig=Ig(:,window+half_window+1:nx+window+half_window);
%第一个卷积要全部用原图像的数据, 从而
%卷积中第 l 项用的图像数据最小值 = l-windows
% >=(windows-1)/2+1 = 原图像在扩展图像中的位置
else
%%二维卷积
x=ones(window,1)*(-half_window:half_window);%横坐标
y=x‘;%纵坐标
filter=exp(-(x.^2+y.^2/(2*sigma)));%二维 guassian 函数
filter=filter/(sum(sum(filter)));%归一化
%%图像扩展
if (half_window>1)
xLeft=mean(I(:,[1:half_window])‘)‘;
%matlab 是对列取平均的,返回行向量
xRight=mean(I(:,[nx-half_window+1:nx])‘)‘;
else
xLeft=I(:,1);
xRight=I(:,nx);
end
I=[xLeft*ones(1,half_window),I,xRight*ones(1,half_window)];
if (half_window>1)
xUp=mean(I([1:half_window],:));
xDown=mean(I([ny-half_window+1,ny],:));
else
xUp=I(1,:);
xDown=I(ny,:);
end
I=[ones(half_window,1)*xUp;I;ones(half_window,1)*xDown];
Ig=conv2(I,filter,‘valid‘);
end
[家里蹲大学数学杂志]第057期图像复原中的改进 TV 模型,布布扣,bubuko.com
[家里蹲大学数学杂志]第057期图像复原中的改进 TV 模型
标签:des style blog http 数据 2014
原文地址:http://www.cnblogs.com/zhangzujin/p/3817746.html