标签:
转自:http://www.cnblogs.com/kekec/archive/2011/08/15/2139893.html#undefined
MatrixTransform是从Transform - Group继承而来,因此可以在它的下面挂接Node对象。
通过设置其矩阵,来实现其下子节点的模型变换。
-- 用局部坐标系来理解(局部坐标系又称惯性坐标系,其与模型的相对位置在变换的过程中始终不变)
如下代码:
// 创建圆柱体 double r = 0.5; double h = 3.0; osg::Vec3 orginPt(0.0, 0.0, 0.0); osg::ref_ptr<osg::Geode> cylinderGeode = new osg::Geode; osg::ref_ptr<osg::Cylinder> geoCylinder = new osg::Cylinder(orginPt, r, h); osg::ref_ptr<osg::ShapeDrawable> cylinderDrawable = new osg::ShapeDrawable(geoCylinder.get()); cylinderDrawable->setColor(osg::Vec4(1.0f,0.0f,0.0f,1.0f)); cylinderGeode->addDrawable(cylinderDrawable.get()); // -- 以下操作都是针对局部坐标系而言 -- // 先将圆柱体平移(20.0, -12.0, -35.0) // 再将z轴方向旋转至向量n方向 此时局部坐标系的z轴和n向量一致 // 接着,将旋转后的模型的沿z方向平移0.5*h长度 (全局坐标系,相当于沿n方向平移0.5*h长度) // 最后将模型放大2倍 osg::Vec3 n(1.0, 1.0, -1.0); osg::Vec3 z(0.0, 0.0, 1.0); n.normalize(); osg::ref_ptr<osg::MatrixTransform> mt = new osg::MatrixTransform; mt->setMatrix(osg::Matrix::scale(osg::Vec3(2.0, 2.0, 2.0))* osg::Matrix::translate(osg::Vec3(0, 0, 0.5*h))* osg::Matrix::rotate(z, n)* osg::Matrix::translate(osg::Vec3(20.0, -12.0, -35.0))); mt->addChild(cylinderGeode);
根据上面的特点,可以计算变化后的模型的三维坐标。
对于下图的包含关系(MatrixTransform A中包含一个MatrixTransform B,MatrixTransform B中包含一个模型)
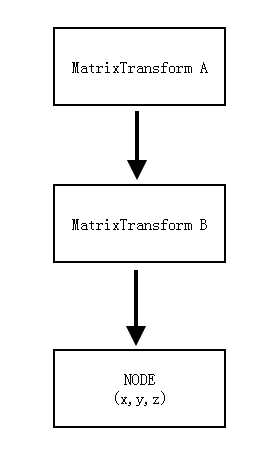
那么,模型的新坐标 (X, Y, Z) = (x,y,z)* B.matrix * A.matrix;
osg中使用MatrixTransform来实现模型的平移/旋转/缩放
标签:
原文地址:http://www.cnblogs.com/flylong0204/p/4580025.html