标签:style blog code java tar width
| 本帖最后由 hitor 于 2013-8-17 22:06
编辑 一、自己玩四轴的经历介绍。 各位模友大家好,我是哈工大航院的一名学生。我接触四轴的时间较早,由于我室友大二做科创就是做四轴的,那时候我们俩一人负责一个项目,他做四轴我做电动独轮车,我不太喜欢我的项目,烧了好多钱,最后也只能草草了事。我对四轴倒是很感兴趣,所以他一焊电路、写程序或是调试PID参数,我都像跟班似的死死的盯着他做的东西,有不懂的就向他请教,时间长了我也掌握了四轴的一些基本知识。几个月前我突发了做四轴的想法,但我不想在这上面打长期战争,所以我找到国内外一个非常火的开源四轴项目----Multiwii,依托这个开源项目,我开始了MWC四轴DIY的征程。 以下是我做到现在四轴的几个测试视频---------稳定飞行,GPS定点,特技飞行。 MWC四轴低空稳定飞行测试 MWC四轴高空夜航 GPS精准定点悬停 (这是GPS定点之后,我扔了遥控器,忍着被蚊子咬自己拿相机拍的,手稍微有些抖动) MWC四轴 稳飞+暴力测试 MWC四轴 特技飞行 翻跟头 (该视频前面几分钟由于还没找到手感,翻跟头翻得不太好,请大家见谅。大家可以快进一下,后半段很精彩哦) 二、Multiwii开源四轴项目简介 MWC是Multiwii Copter的缩写,Multiwii是控制多旋翼航模的开源固件。Multiwii最初由法国航模爱好者Alex创立,用于控制他自己做的三轴飞行器。后经全世界各大高手改造扩展,现在Multiwii不仅仅支持三轴飞行器、四轴、六轴等多轴系列,还支持固定翼和直升机等航模。功能强大而且简单易用。我个人觉得,Multiwii支持的传感器类型极为丰富,而且支持十分广泛的外部设备和飞行模式,这让Multiwii飞控固件发展为国外最受欢迎的多轴开源固件之一。当然Multiwii也有缺点,与APM、海盗等其他开源固件相比,Multiwii最大的不足就是目前还不支持地面站。 更多更详细的信息请参考以下网址: 使用教程系列网址: 1、Multiwii官网 http://www.multiwii.com/ 2、Multiwii wiki 网址(请大家务必一定要熟读这上面的内容) http://www.multiwii.com/wiki/index.php?title=Main_Page 3、Alex在RCgroups上所发的有关Multiwii的主贴(这个需要大家仔细看看) http://www.rcgroups.com/forums/showthread.php?t=1261382 4、这两个教程贴适合新手 http://www.rcgroups.com/forums/showthread.php?t=1332876 http://www.rcgroups.com/forums/showthread.php?t=1348268 5、Shikra的PID调参教程,非常给力! http://www.rcgroups.com/forums/showthread.php?t=1375728 6、几个有用的FAQ网址 Multiwii官网上的FAQ:http://www.multiwii.com/faq berkely的FAQ:http://www.rcgroups.com/forums/showthread.php?t=1340771#post16587954 Wiki上的FAQ:http://www.multiwii.com/wiki/index.php?title=FAQ 资源下载系列网址: 1、Multiwii各版本程序下载地址 https://code.google.com/p/multiwii/downloads/list 2、Arduino软件下载地址(Arduino是编辑和烧录Multiwii固件的必备软件,建议大家下载Arduino 1.0.1及其以后的版本) http://arduino.cc/en/Main/Software 3、FTDI USB转UART模块的驱动下载地址:http://www.ftdichip.com/Drivers/VCP.htm(这个是用来连接电脑给飞控板烧录程序的) 4、Multiwii 的GUI程序需要JAVA虚拟机的支持,需下载安装:http://java.com/zh_CN/download/manual.jsp?locale=zh_CN (如果你的电脑是win7 64位的系统,安装了JAVA虚拟机后GUI仍然运行不了,那你就需要到C:\Program Files\Java\jre7\bin\找到并复制javaw.exe,然后粘贴到C:\Windows\SysWOW64\这个文件夹下面,再重新运行GUI即可) 总之,如果你遇到问题了并想找到问题的答案,那你就得多看多想多动手,建议大家长期关注Multiwii的官方论坛和RCgroups论坛上面的有关讨论。 三、四轴飞行器基础知识 我在这里偷个懒,关于基础知识就不一一介绍了。请大家仔细看看果壳网的这篇名为《四轴飞行器基础篇》的帖子,上面记录了有关四轴飞行器的很详尽的基础知识,相信初学者看后一定会受益良多。 我在这里先感谢果壳网和发这篇帖子的朋友。帖子地址在此:http://www.guokr.com/post/452422/ 还有这里我要声明一下DIY开源四轴的意义。虽然我们利用开源的程序毕竟不如自己去写代码、研究算法有意义,但我认为对于新手来说,我们所掌握的知识和技能有限,不是每个人都对捷联惯导、多传感器数据融合算法(互补滤波、卡尔曼滤波)、PID控制算法、神经网络控制算法等感兴趣和熟知。如果从一开始就要独立完成一套四轴系统,并让其稳定的飞起来,这是很有难度的而且会耗费我们大量的时间却不一定有很多收获。所以我们可以先利用别人的开源代码,让自己的四轴飞起来,我们转过头来再去研究他们的代码,把他们的代码研究透了,我们再写出属于自己的代码。其实这是一个学习的过程,这样你研发的周期缩短了,不易走弯路,不易走到死胡同里转不出来,从而丧失了继续研究的信心。毕竟Multiwii那些代码可是世界各地的牛人合作写出来的,我认为很有借鉴和研究的价值。 四、飞控板的制作 我建议大家参照Multiwii官网的硬件要求,自行设计制作飞控板,这样你对MWC四轴整个系统将会有更深刻的理解。 大家可以参考MultiWii官网的硬件连接教程和berkely在RCgroups上发的有关MWC硬件连接到帖子,链接如下: http://www.multiwii.com/connecting-elements http://www.rcgroups.com/forums/showthread.php?t=1340771 Multiwii硬件分为Arduino 328p(ATmega328P)和Arduino mega(ATmega2560)两种版本。两个版本各有优劣,均支持多种外设,但接口稍有不同。mega版本只能用串口接GPS和声呐,由于两个外设占据了串口,如要用蓝牙或FTDI查看飞控状态信息,这就是不可能的了。328p版本虽然容量小,但可以采用双328p的模式,再用一片ATmega328P制作一块I2C-GPS/Sonar导航板,这样就可以用I2C来读取GPS和声呐的数据,不必占据串口,那这样一来就可以实时的用蓝牙等查看飞行状态信息了。所以我个人比较喜欢双328p的模式,所以我做的飞控板是基于Arduino 328p版本的。 采用了I2C-GPS/Sonar导航板之后,GPS的距离计算和导航解算等都在导航板里完成,导航板的固件也是开源的:https://code.google.com/p/i2c-gps-nav/。这是一个很不错的导航开源固件,算法很精到。经过使用和对比,我觉得328p版的I2C-GPS比Arduino mega版的串口GPS定点精度高不少,而且融合了声呐的数据,可以修正GPS在低空的定高误差,使低空定高更加精确。I2C-GPS/Sonar导航板的详细信息接下来会讲到。 简单来说,MWC飞控板由pro mini + GY-86 + PCB底板组成,pro mini 和GY-86市面上都可以买到,PCB板需要我们自己画一下。pro mini小板上有ATmega328微处理器和一些接口电路;GY-86是传感器板,上面集成了MPU6050、HMC5883L、MS5611等。 这是我自己画的PCB板,有点简陋,呵呵 <ignore_js_op> 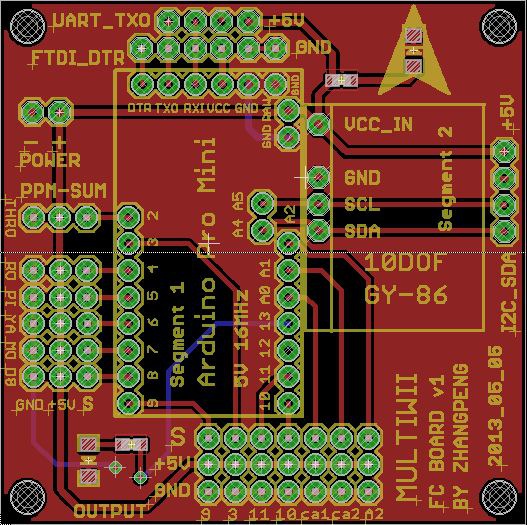 打出来是这样子 <ignore_js_op> 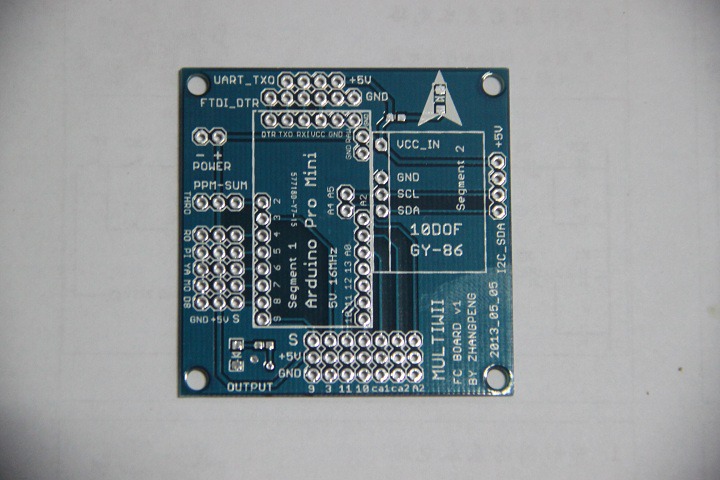 焊好之后 <ignore_js_op>  通电状态下 <ignore_js_op> 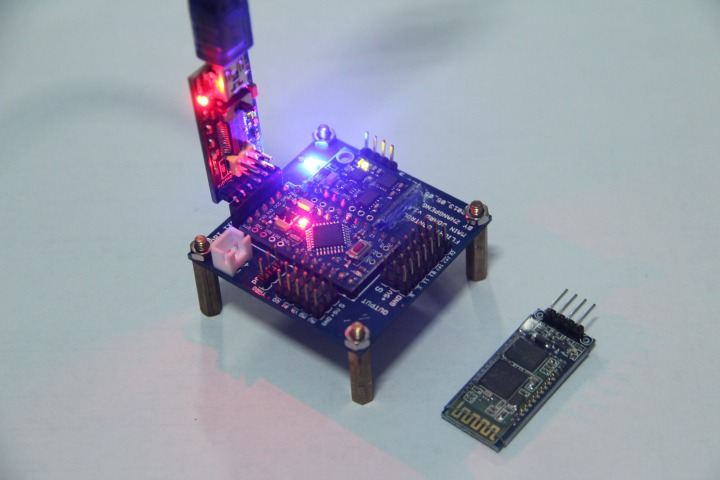 下面介绍飞控板的详细硬件信息: ATmega328P-AU 微处理器 (32Kb的Flash,1Kb的EEPROM。时钟频率:16MHz。用USBasp或USBtinyISP烧写Arduino bootloader之后,可用Arduino IDE来编辑和烧录程序) MPU6050 MEMS三轴加速度计+三轴陀螺仪 (这是最主要的姿态传感器。InvenSense公司的MPU6050芯片内部集成了三轴加速度计和三轴陀螺仪,不仅消除了我们焊接电路板时易造成的加速度计和陀螺仪之间的对准误差(alignment error),而且由于其内置了数字可编程的低通滤波器,在飞行器经受较大振动时,可用程序设置适当频率的低通滤波器,用来滤掉高频振动。这是一个很有效的方法用来减小四轴机体振动对陀螺仪数据的影响,这个方法同样适用于该公司的ITG3205。还有就是大家熟知的MPU6050内置的DMP,但是我觉得四轴的姿态数据融合还是写在主控里比较好) HMC5883L 三轴磁强计 (磁强计一个用途是用来锁定航向,另一个用途是:GPS配合磁强计使用才能实现GPS HOME(不知道方位,四轴怎么飞回家啊)等功能,这也就是MWC为什么要设置当地地磁偏移量的原因) MS5611 高精度气压计 (MS5611的测量精度很高,再刷入Multiwii 2.2固件,那四轴的定高精度不是一般的好。大家如果自己做飞控的话,我建议大家不要选择BMP085,这是个鸡肋,还是多花点钱买个MS5611,定高效果很不错哦) LLC电路 I2C逻辑电平转换电路 飞行方向指示灯(蓝色1206 LED)和飞控状态指示灯 遥控器接收机接口 (THRO:油门通道、RO:横滚通道、PI:俯仰通道、YA:偏航通道、MO:飞行模式通道、D8:额外通道) 电调舵机信号接口 (D9、D3、D11、D10:电调信号;A0-A2:云台增稳舵机信号) FTDI接口 (接FTDI刷固模块) UART接口(接蓝牙、数传等) I2C接口 (接I2C-GPS/Sonar导航板) (补充说明:FTDI和蓝牙从机模块是和飞控板配套的两个必要工具,简单说,FTDI主要用来烧录程序,蓝牙从机模块主要用来实时调整PID等飞控参数。FTDI一个用途是用来往飞控板里烧录程序,另一个用途是:Multiwii自带了一个调参用的配置GUI,只有用FTDI连接飞控板和电脑才能使用GUI来配置飞行参数。蓝牙从机模块是用来建立飞控板和安卓手机之间的无线通信,这样就可以实时的监控飞行状态和调整飞行参数。这个在调整PID参数的时候可是很有用的,想象一下,你只需带一个安卓手机,下载一个Multiwii配置专用的APP,然后就可以实时的在飞行器飞行过程中调整PID参数,不必停机连接电脑,也不必带笨重的设备,何乐而不为呢?) 我手里还有几块板子,pro mini和GY-86也还剩几块,不想自己做飞控的朋友可以联系我。 五、MWC四轴飞行器其他硬件购买指南(玩航模可是很烧钱的哦) 了解了一些四轴飞行器的基本知识,相信大家都跃跃欲试想DIY一台属于自己的四轴了。不过别急,兵马未动粮草先行,大家先准备好银两买所需硬件设备吧! 在这里先推荐给大家两个航模店:一个是新动模型(http://shop67525257.taobao.com/?spm=0.0.0.0.QF9oxA),另一个是开心模型屋(http://shop34097635.taobao.com/?spm=0.0.0.0.7eJZRz)。如果你需要什么航模配件,就到这两个航模店买就行了,他们店里东西很全。 1、机架: 机架你可以自己画图纸然后送去订做,或者买碳纤维管回来自己加工。但从成本和质量层面考虑(特别是对于新手来说,机架的耐摔性十分重要),我建议大家还是买现成的机架。而且电机轴距最好是450mm的。 A、如果你为了节约成本,你可以买这种仿大疆 F450的机架,下底板集成了分电板。以下两个链接卖的都是同一种仿制机架,看你选择。 http://item.taobao.com/item.htm?spm=a230r.1.14.1.MsCAVX&id=18696965642 http://item.taobao.com/item.htm?spm=a230r.1.14.25.MsCAVX&id=18132207528 B、如果你资金充裕,想要更好地机架性能,那你就多出点钱买大疆原装正品F450机架。以下是两个航模店里的F450机架,都是正品,价格都一样。 http://item.taobao.com/item.htm?spm=a1z10.3.w1017-2469627740.31.7XW9TP&id=17481315004& http://item.taobao.com/item.htm?spm=a1z10.3.w1017-1417071923.60.FpjdCX&id=16614643185& 2、电机: 电机的话,我其他的也不推荐了,因为我就信任新款朗宇X2212 kv980。在KV值1000左右的电机中,朗宇x2212是真高性价比。以下是该电机在两个航模店里的链接。 http://item.taobao.com/item.htm?spm=a1z10.3.w1017-2469627740.16.3TH2B7&id=20349804060& http://item.taobao.com/item.htm?spm=a1z10.3.w1017-1417071923.15.gLDjjC&id=10370037067& 至于多轴飞行器电机、电调、桨、电池之间的选择搭配,大家看看这个网页计算器就行了:http://www.ecalc.ch/xcoptercalc.htm?ecalc&lang=cn 3、电调: 电调的选择对于多轴飞行器来说肯定是响应越快越好,多轴要的就是快速响应。但快速响应等高性能就意味着高价格。在价格和性能之间权衡,不好弄? 但BLHELI电调开源固件解决了这个问题。http://www.helifreak.com/blog.php?b=2001 具体做法:我们只需要花40-50块钱买一个好盈 天行者20A/40A电调,然后往电调里刷BLHELI的电调固件,然后你就得到了一个响应速度可以和200-300块钱的高价电调相当的廉价电调。具体如何刷BLHELI我会在之后的教程里专讲。话说回来这BLHELI固件也不是非刷不可,不刷就是响应慢了点,照样能飞起来。好盈天行者20A和好盈天行者40A,选哪个都行,看你资金情况和长远考虑。其实好盈天行者20A的就够用了。具体链接如下: http://item.taobao.com/item.htm?spm=a1z10.3.w1017-2469627740.18.JDOMlB&id=14110522569& http://item.taobao.com/item.htm?spm=a1z10.3.w1017-2469627740.16.JDOMlB&id=14222029428& http://item.taobao.com/item.htm?spm=a1z10.3.w1017-1417071923.17.EvNNgn&id=12552040566& http://item.taobao.com/item.htm?spm=a1z10.3.w1017-1417071923.19.EvNNgn&id=12368962826& 备注:大家其实不必买焊好接头的,自己买接头回来自己需用时再焊上,更加方便一些。 4、电池: 电池的话大家就买3S 2200mah的就行了,花牌、格氏的都行。重量较轻,价格也便宜,只是续航时间可能会稍短一些。大家如果追求大容量的电池,以后玩好了再上吧。现在2200mah已经够用了。 如果资金充裕,最好买个两块,留个备用。链接如下: http://item.taobao.com/item.htm?spm=a1z10.3.w1017-2469627740.17.0cuxU0&id=14556427489& http://item.taobao.com/item.htm?spm=a1z10.3.w1017-1417071923.27.cnRJWT&id=3742089725& 5、充电器: 有了电池就不得不说说充电器的事情了,你可以用花牌推荐用的充电器,但充电时间较长。做四轴需要不断的实验,那你就得不断的充放电。所以一个好的充电器将大大提高你的工作效率,使你事半功倍。我这里给大家推荐的是航模爱好者十分喜爱的B6平衡充电器,大电流充电,安全快速。 http://item.taobao.com/item.htm?spm=a1z10.3.w1017-2469627740.20.R18od0&id=13654813327& http://item.taobao.com/item.htm?spm=a1z10.3.w1017-1417071923.16.q5WEWq&id=10375650325& 备注:如果你没有电源适配器,建议大家最好把相应的电源适配器也一起买了。 6、桨: 桨的话我建议大家买1045或1047的桨,如果你资金充裕,那买1045的碳桨是最好的。但对于桨这种耗材来说,买便宜一些的仿APC 1047桨才是最合适的,价钱合适,柔韧性强。切记不可买那些花花绿绿质量极差的桨。链接如下: http://item.taobao.com/item.htm?spm=a1z10.3.w1017-1417071923.40.y54uFd&id=14478811742& http://item.taobao.com/item.htm?spm=a1z10.3.w1017-2469627740.44.fwF8GU&id=16226350208& 备注:大部分桨由于制作工艺的问题,会造成桨叶不平衡,这样的桨运行起来会引起较大的震动,所以建议大家在运用之前最好先对桨做一下桨平衡,具体如何做我之后会讲。 7、遥控器: 对于玩航模的人来说,遥控器是必不可少的。如果你之前有遥控器,那最好不过。无论你已经有还是将要买,选择多轴用遥控器一定要注意以下几点规则:A、遥控器至少有五通道及其以上,只有四个通道的话你没法切换飞行模式。对于MWC来说,你最好要具备两个飞行模式切换通道(比如说一个三档开关+ 一个两档开关),也就是六个通道才好玩。B、还有遥控器必须具备子微调(Sub Trim)功能(比如用来微调通道中立点,中立点调整不好会导致四轴飞行不稳)及通道行程(ATV)调整功能(用来调整整个通道的行程,通道行程调整不好可能会导致飞控无法解锁等问题)。C、必需支持固定翼模式(无混控模式) 综上分析,为了兼顾性能和价格,我推荐大家购买天地飞7通 WFT07这款遥控器,国产遥控,性价比极高。链接如下: http://item.taobao.com/item.htm?spm=a230r.1.14.13.SFs5lJ&id=14133967071&initiative_new=1 http://item.taobao.com/item.htm?spm=a1z10.3.w1017-1417071923.33.iWUnNi&id=7747025805& 当然如果你已经拥有或资金充裕打算买九通、十通等Futaba或其他高性能遥控,那是最好不过的。但对于新手练手,天地飞7通已经足够了。 8、其他零散配件: 低压报警器:防止电池过放,链接如下: http://item.taobao.com/item.htm?spm=a1z10.3.w1017-1417071923.11.Z70LjW&id=8717298769& http://item.taobao.com/item.htm?spm=a1z10.3.w1017-2469627740.11.P2MHUK&id=16758636666& 飞控连接线:可自制,也可以买。链接如下: http://item.taobao.com/item.htm?id=9988106187 3M泡沫双面胶、香蕉头、T头、硅胶线、热缩管、尼龙扎带、各式胶带、强力胶水、PU防震胶垫、魔术贴扎带、螺柱螺母等配件,在我之前推荐的那两个航模店里都可以找到,可以买一些备用。 9、经费预算 按照性价比指标来计算,我做了这个使四轴能稳定飞行经费预算表,不加GPS。
以上这些材料及其售价完全参考淘宝标价,无丝毫篡改。我个人觉得要做好一架能稳定飞行的四轴飞行器,以上材料是一定要具备的。 六、全套制作流程 材料和设备置办齐全之后,我们开始动手制作四轴飞行器。 1、机架零件:上下底板、四支机臂、一包螺丝。 <ignore_js_op>  2、在下底板用电钻和锉刀加工两个方形槽出来,方便电池扎带穿过,用来固定电池。方形槽的位置和尺寸依照电池大小自行设计。 <ignore_js_op> 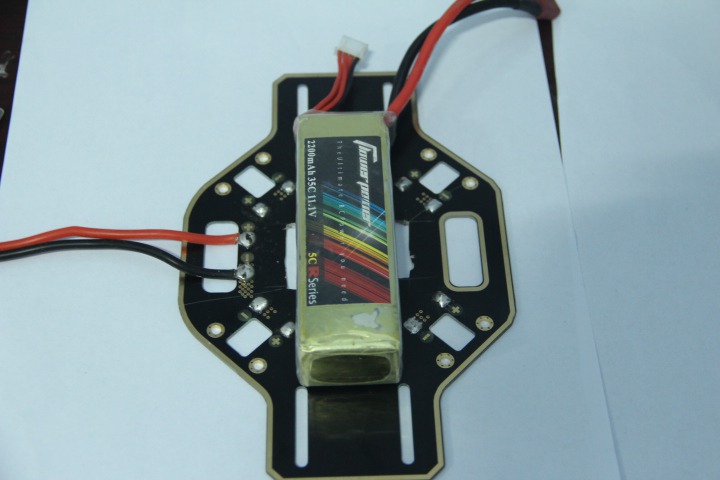 3、准备电烙铁和焊锡,将电调电源线和电池电源线焊接到下底板(分电板)相应位置上。注意别搞错正负极,也别弄短路。 <ignore_js_op> 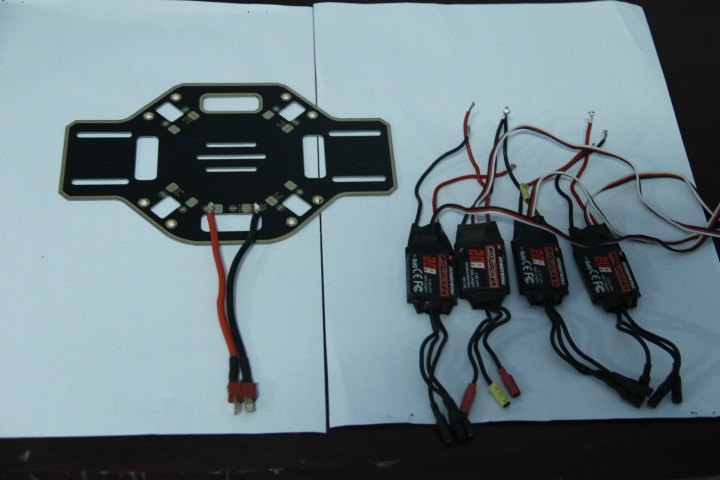 <ignore_js_op> 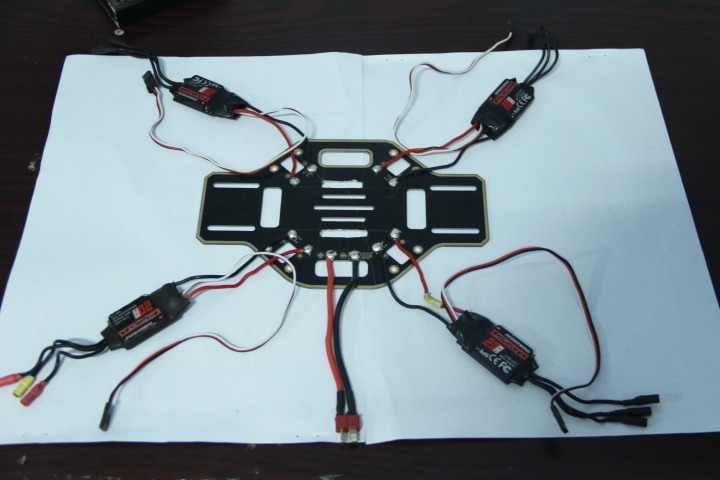 4、准备好螺丝刀,用该机架自带的螺丝将四支机臂固定到下底板上。螺丝得拧紧,但别拧坏了。 <ignore_js_op> 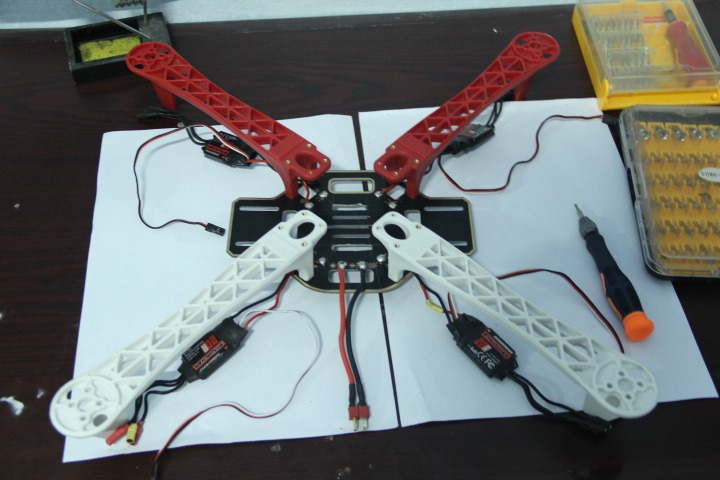 5、将上底板和四支机臂用剩下的螺丝固定好 <ignore_js_op>  6、先将四个电机组装好,再将它们分别固定到机臂的端部。 <ignore_js_op> 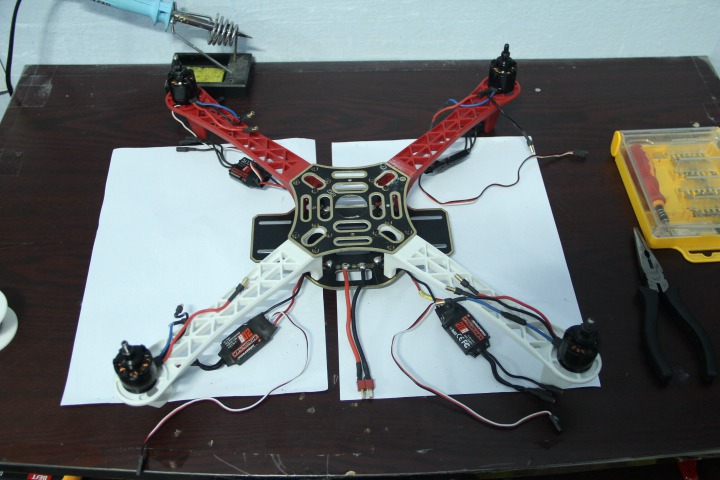 7、给电调刷BLHeli固件 由于主贴过于冗长,刷电调部分详细内容见此分贴:http://www.amobbs.com/thread-5546515-1-1.html 8、四个电调都刷过BLHeli固件之后,将电调用黑胶布包好,再用尼龙扎带将其捆绑在四支机臂下方。我制作的是的X型四轴,如下图,红色机臂角平分线即为机头方向。 <ignore_js_op> 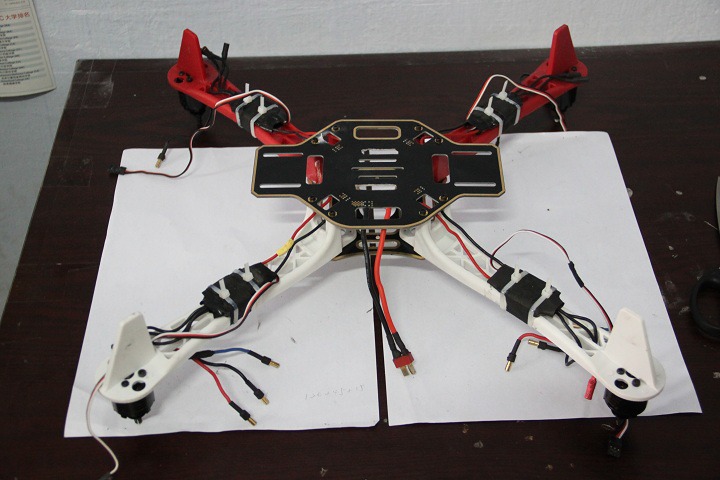 按照MWC四轴的电机转向分布图,将电调和电机连接起来,务必接电池后,用遥控器油门通道测试每个电机转向,转向与分布图规定不符者需交换三相线中任意两根。确保四个电机转向与分布图中完全一致。 电机转向分布图如下: <ignore_js_op> 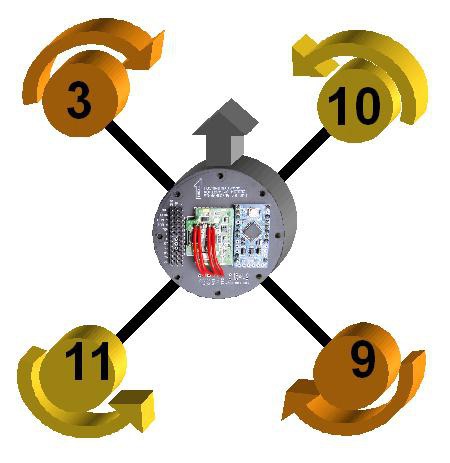 电机与电调正确连接后如图所示: <ignore_js_op> 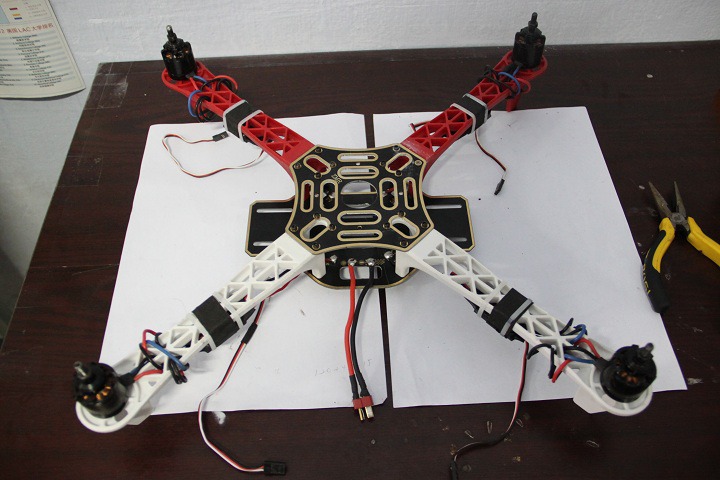 9、给飞控板烧录程序及配置相关参数。 四轴的动力系统完成之后,就轮到给飞控板烧录程序和配置相关参数步骤了。 用FTDI连接电脑和飞控 <ignore_js_op> 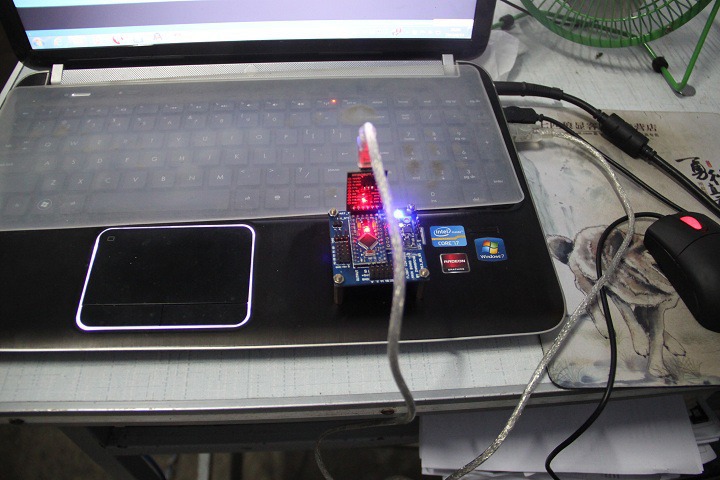 运行Arduino IDE,到MultiWii_2_2\MultiWii文件夹下打开主程序MultiWii.ino,其他子程序会自动打开。如下所示: <ignore_js_op>  <ignore_js_op> 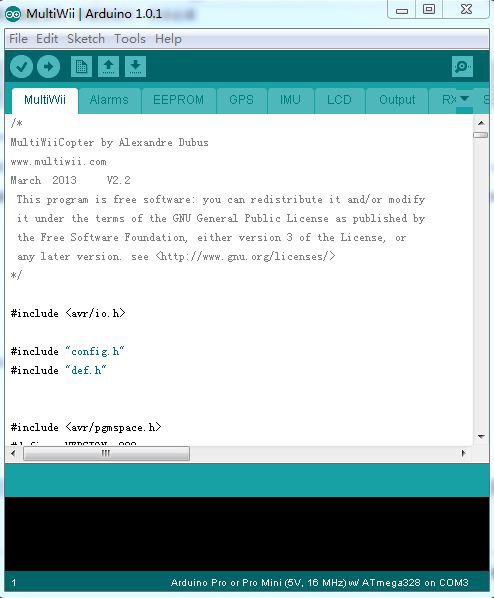 最大化后选择倒数第三个子程序config.h。整个飞控程序中,我们需要配置的只有config.h。 具体如何配置程序参照以下PDF文档。 <ignore_js_op>  MultiWii程序设置图文教程.pdf (579.7 KB, 下载次数:
648) MultiWii程序设置图文教程.pdf (579.7 KB, 下载次数:
648) 我配置的程序也提供大家参考。 <ignore_js_op>  MultiWii_QuadX.zip (1022.99 KB, 下载次数:
352) MultiWii_QuadX.zip (1022.99 KB, 下载次数:
352) 10、MultiWii GUI参数配置 往飞控里烧玩程序之后,需要打开GUI,即MultiWii /MultiWiiConf文件夹下的MultiWiiConf.exe。之前讲过,要想运行MultiWiiConf.exe,得先安装JAVA虚拟机。Multiwii 的GUI程序需要JAVA虚拟机的支持,需下载安装:http://java.com/zh_CN/download/manual.jsp?locale=zh_CN (如果你的电脑是win7 64位的系统,安装了JAVA虚拟机后GUI仍然运行不了,那你就需要到C:\Program Files\Java\jre7\bin\找到并复制javaw.exe,然后粘贴到C:\Windows\SysWOW64\这个文件夹下面,再重新运行GUI即可) 成功运行则出现如下界面: <ignore_js_op> 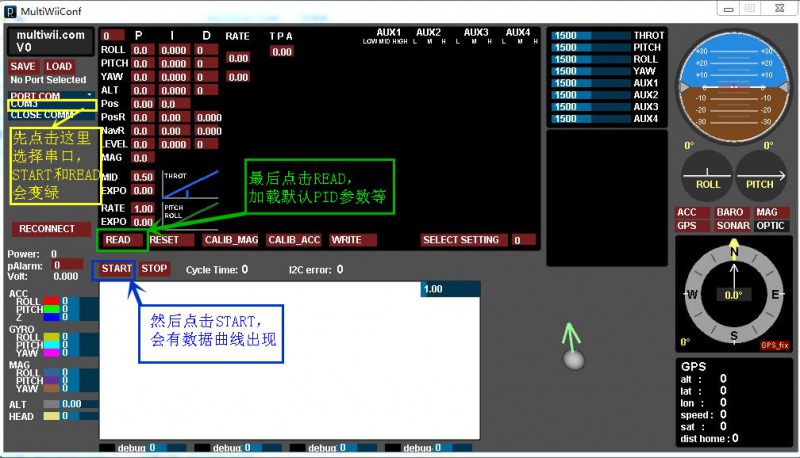 若按照上图正确操作则会出现以下界面: <ignore_js_op> 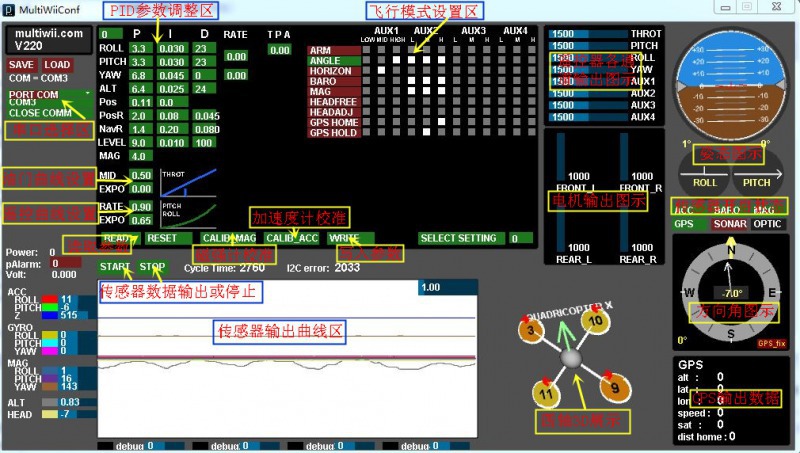 关于MultiWii GUI的基本操作知识了解的差不多了,我们开始通过GUI配置相关参数。 A、校准加速度计 具体操作:将飞控板或四轴整体放置在水平面上,比如房间的大理石地面等。用FTDI连接电脑和飞控,运行GUI,点击CALIB_ACC,你会发现ACC的pitch、roll、Z三轴输出值会变成0,0,512左右的值,则表明校准完成。 B、校准磁强计 具体操作:在校准了加速度计基础上,点击CALIB_MAG,这时你会发现飞控板指示灯在闪烁,现在你有30秒的时间来把飞控板或四轴整机分别绕着pitch、roll、yaw三轴旋转360度以上,为避免旋转不够,最好每个轴都旋转两周。校准完成之后找个指南针测试一下。 提示:最好没把飞控板固定到机架之前就校准磁强计,这样方便一些。若飞控板固定了,校准磁强计得拿着偌大个四轴绕各轴转360度,USB线绕来绕去的很麻烦的。当然以后可以用蓝牙来校准,这个以后再介绍。 C、调整PID参数 具体操作:将鼠标定位在待调整的PID参数上,按住鼠标左键左右移动鼠标即可调整该数值,很为奇特。 其实PID参数默认即可,初期不必调整,默认参数就能飞的很稳。后期飞特技等再调整即可。 D、调整油门曲线 如果你在试飞过程中发现让四轴达到悬停非常难,油门非常不好把握,一拉油门就升老高,一降油门就直接落到地上,那你应该调整油门曲线。比如MID设为0.4,EXPO设为0.7等。遥控曲线不必设置,默认参数就很好。 11、把飞控板固定到机架上底板上 在飞控板背面四个角落粘上厚一点的3M泡沫双面胶,再将飞控板粘到机架上底板中央,一定要注意位置置中,与机架方向对齐。条件好一点可以加一块减震硅胶PU胶。用3M胶或PU胶的好处是起隔震作用,减少机体振动对传感器的影响。注意飞控板的飞行方向(蓝灯所在箭头方向)和四轴机头方向(红色机臂角平分线方向)要对齐重合。飞控板要尽量安放在上底板的中央。具体如下图所示: <ignore_js_op>  <ignore_js_op> 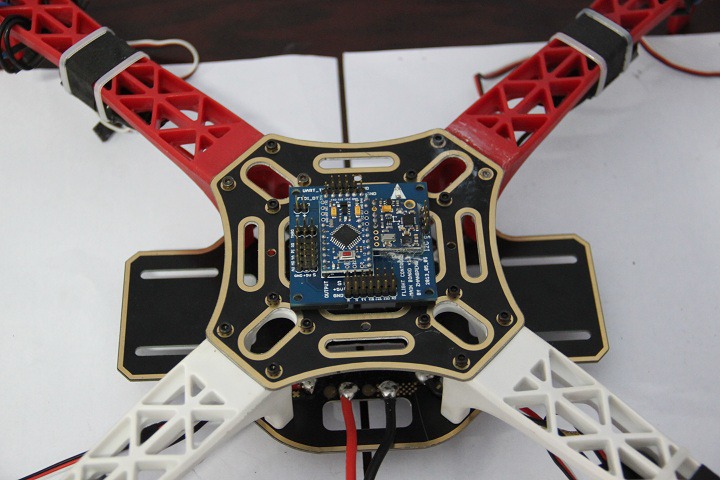 12、飞控板和遥控器接收机的连接 熟读遥控器的使用说明,依照说明先设置遥控器,比如机型要选择固定翼模式,控制杆设置默认即可,之前也讲了可以在高级设置菜单下的可编程混控设置三档开关,用于切换飞行模式。这些最基本的遥控器设置都必须提前做好,哪里不懂就仔细阅读使用说明书。 这是天7的接收机图示 <ignore_js_op>  按照图中各通道的功能,将接收机和飞控板连接起来,这里我们只连接5个通道: 飞控板 接收机 THRO --------- 油门(第3通道) RO ---------- 副翼(第1通道) PI ---------- 升降舵(第2通道) YA ---------- 方向舵(第4通道) MO ---------- 起落架(第5通道,设置三档开关之后用来切换飞行模式) <ignore_js_op> 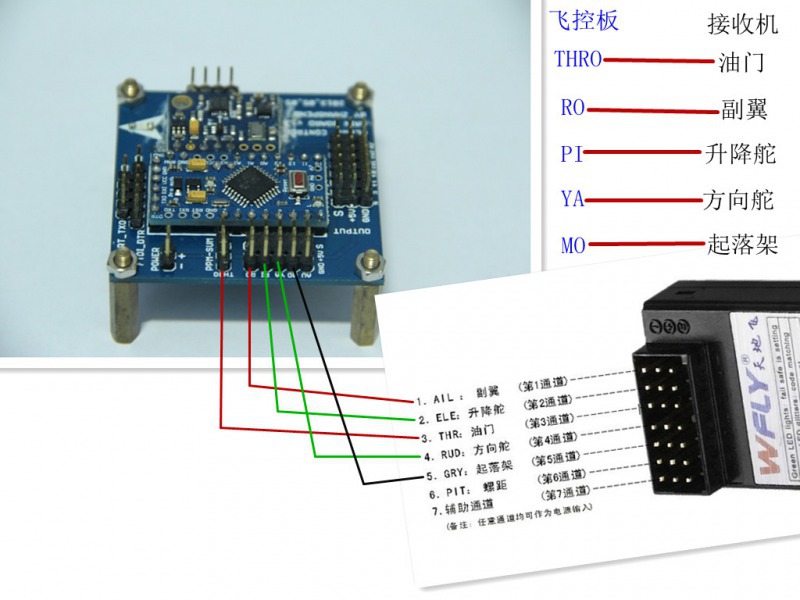 然后用双面胶粘到机架下底板,可以用尼龙扎带把连接线束一束。如下图所示 <ignore_js_op> 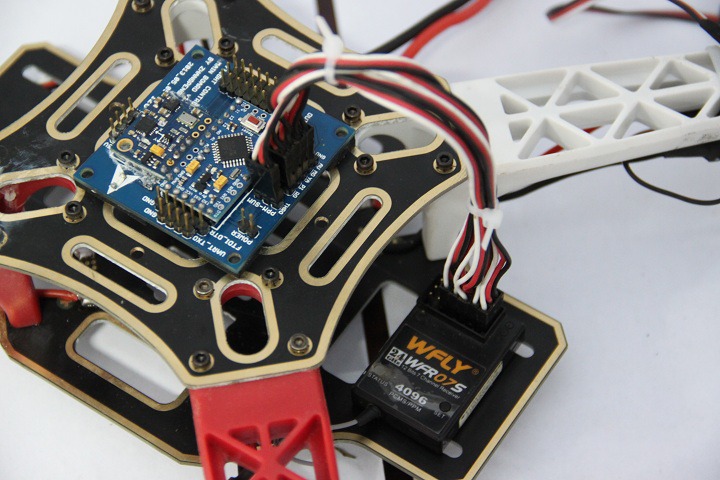 13、飞控板与电调的连接 电调自身带信号线:红色为+5V,黑色为GND,白色为PPM信号。整个机体来看,按照机头方向将四个电机分为头左(3号电机),头右(10号电机),尾左(11号电机),尾右(9号电机)。3号电机信号线连接飞控板输出部分3号排针,10号电机连接10号排针,11号电机连接11号排针,9号电机连接9号排针。需要注意的是:飞控板由电调供电,有四个电调,但不能让四个电调并联供电,会引起故障。所以必须剪断其中三个电调的+5V供电线。只留一个电调给飞控板供电。如下图所示 <ignore_js_op> 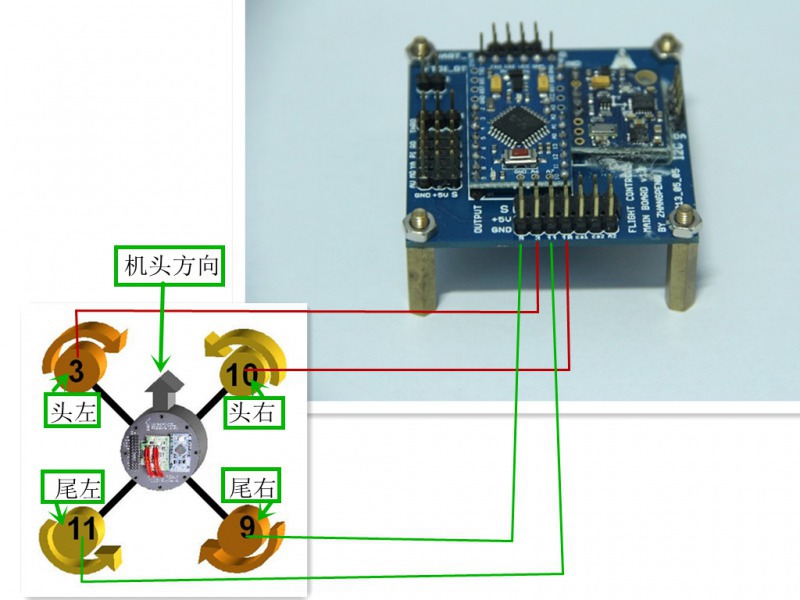 连接好之后如下图所示 <ignore_js_op> 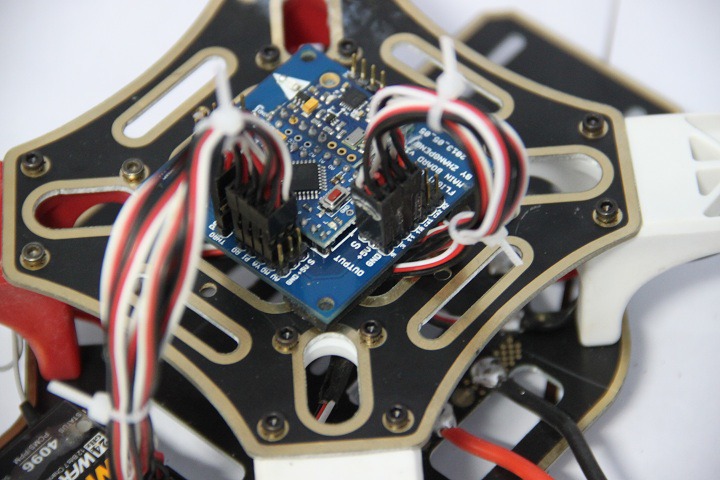 这样再用电池扎带将电池固定在下底板上,那整架飞机就算初步组装完成。进一步调试之后,装上桨就可以去试飞了。这里提一下:调试的时候不要装桨,不小心会伤着人,等调试完成之后试飞阶段再装桨。 14、四轴整机调试 插上FTDI,打开MultiWii GUI,现在进行整机调试。 A、整机校准加速度计 具体操作:将四轴整机平放在水平面上,比如大理石地面。点击GUI上的CALIB_ACC,看到加速度计pitch、roll轴示数归零,Z轴示数在512左右则表明校准成功。 B、遥控器设置 具体操作:在对遥控器进行了基本设置的基础上,打开遥控器开关,这时接收机上的红灯会灭掉,表示连接成功。这时观察GUI上遥控器各通道示数会有变化。 首先检查各通道正反是否正确。推动前四个通道的摇杆,正反设置正确的标志: 油门通道:向前推动摇杆,GUI里油门通道示数变大;向后拉摇杆,GUI里油门通道示数变小。 升降舵通道:向前推动摇杆,GUI里油门通道示数变大;向后拉摇杆,GUI里油门通道示数变小;自动回中GUI示数在1500左右。 副翼通道:向右推动摇杆,GUI里油门通道示数变大;向左推动摇杆,GUI里油门通道示数变小;自动回中GUI示数在1500左右。 方向舵通道:向右推动摇杆,GUI里油门通道示数变大;向左推动摇杆,GUI里油门通道示数变小;自动回中GUI示数在1500左右。 三档开关通道:低档GUI示数1000左右;中档GUI示数1500左右;高档GUI示数2000左右。 若正反向不正确,则在遥控器设置里正反设置里改动即可。 正反设置完成之后需要校准各通道行程,要求各通道最小值在1050以下,最大值在1950以上。 然后升降舵、副翼、方向舵三个通道需要校准中立点(即摇杆自动回中那个值),利用遥控器各通道旁边的微调开关,将以上三通道的中立点校准到1500左右,偏差不超过正负4。 设置完正反向、通道行程、通道中立点之后,会得到如下界面 <ignore_js_op>  C、尝试解锁 尝试解锁之前不要接上电池,接了电池解锁之后电机就会动了。初始时先看看解锁后GUI上的各电机输出是否正常。 遥控器摇杆的组合运用说明见此文档: <ignore_js_op> MultiWii-StickConfiguration-22_v0-577215664.pdf (96.6
KB, 下载次数: 238) 还有要感谢fpvdiy博主,写有关MWC的一些列好教程,大家可以参考他的博文http://blog.sina.com.cn/s/articlelist_2164576720_0_1.html 关于遥控器摇杆组合操作,大家也可以参考他的博文:http://blog.sina.com.cn/s/blog_8104d1d00100swc2.html 再次感谢写这些教程的博主。 操作遥控器的时候注意对应自己的遥控器是美国手还是日本手。 若解锁成功,则初始时刻各个电机的输出是你当时在程序里设置的MINTHROTTLE的值,称之为怠速,即飞控解锁之后四个电机将以怠速转动。你加油门之后四个电机的输出将升高且各不一样(PID算法的原因,主要是I在作怪)。所以当你发现四个电机输出不一致时不要奇怪,这是I在捣乱,呵呵。 <ignore_js_op> 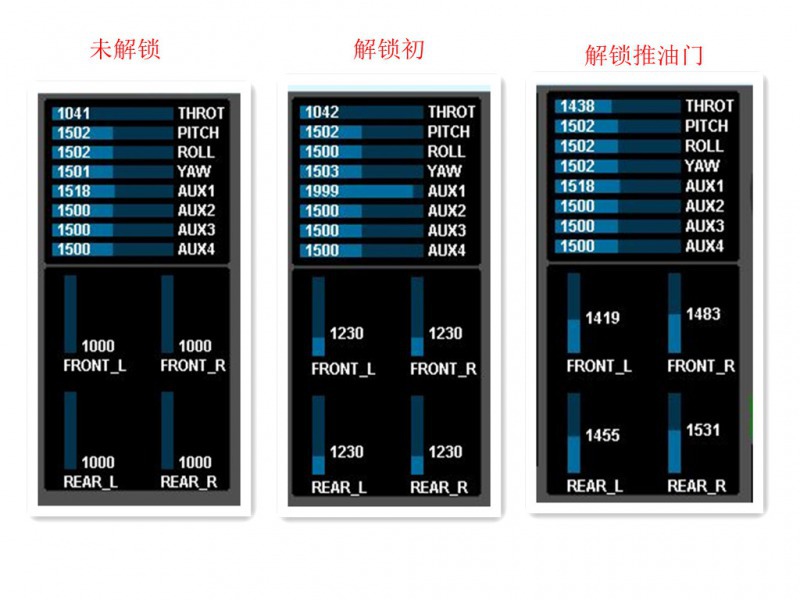 若解锁不成功,则是你各通道行程没设置对。 D、重新确认一下飞行模式是否设定,注意设定之后随着三档开关的切换,飞行模式也在切换(GUI里颜色变绿)。PID参数暂时不用调整,默认参数就能飞的很稳,注意改动参数后要点击WRITE将改动写入飞控里,否则你的改动将不起作用。 E、利用遥控器摇杆组合校准陀螺仪,飞控板指示灯闪烁,静态下GUI里陀螺仪输出数据归零则说明陀螺仪校准完成。 15、电调校准 在程序配置部分有讲过,在试电机之前要进行电调校准。电调可以用遥控器校准,也可以直接用程序校准。进行这一步,四轴不能装桨,会出危险。 具体操作:用Arduino IDE打开MultiWii程序,转到子程序config.h,将代码拉倒最底部,找到ESCs calibration <ignore_js_op> 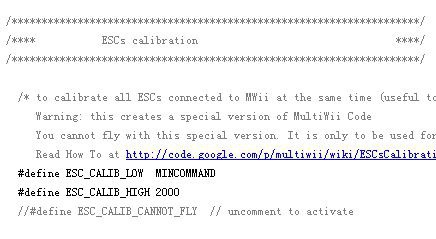 去掉//#define ESC_CALIB_CANNOT_FLY这句代码前面的两条斜线,启用这句代码,并将改过的程序烧录到飞控板里。烧录完成后,拔掉FTDI,接上电池,这时你会听到一段奇怪的音调,等待一分钟左右,拔掉电池,重新插上FTDI,将#define ESC_CALIB_CANNOT_FLY这句代码注释掉,再次烧录到飞控板里,至此校准电调完成。 16、试电机 以上设置完成之后,可以将电池接上,注意此时仍然不能装桨。开遥控解锁,此时你会发现四个电机都转动,推油门转速增大,推升降舵和副翼、方向舵,相应的电机会有转速变化。若出现这些现象说明电机正常运转。若出现有的电机堵转,那可能是你的MINTHROTTLE设置过小,改程序增大一些试试看,直到四个电机同时转动方可。 17、初次试飞 至此你已经可以带着四轴和遥控器出去试飞了。也只有到这一步你才能将四支桨装上,注意桨的方向要与电机转向相同,螺丝尽量拧紧了。初次试飞,成败与否不可预测,人身安全最为重要。找个宽阔一些,人少一些的泥松草厚的飞场,放置四轴,接上电池,解锁,慢慢推油门,一点一点的小心操控。 <ignore_js_op>  诚挚预祝大家成功! 七、GPS模块和超声波模块设置 前面讲过328p的MWC飞控板不支持串口的GPS,只支持I2C-GPS,这就需要我们自己做一块I2C-GPS导航板,这块导航板同时还可以接超声波模块,用来低空定高。 I2C-GPS导航板程序也是开源的,我们只需做一块导航板即可。链接在此 https://code.google.com/p/i2c-gps-nav/downloads/list 大家可以到此下载最新的固件。导航板其实一块pro mini即可搞定。GPS推荐购买克瑞斯降价出售的外观有瑕疵的Ublox NEO 6M GPS模块,因为外观有瑕疵,所以他们降价出售,原价160呢,降价之后只售70。 很划算。大家放心,只是外观上有瑕疵,性能完全没问题,我一直在用这款GPS,很不错,物美价廉。推荐大家购买,我视频里的GPS定点就是用这款GPS做的。链接如下: http://item.taobao.com/item.htm?spm=a1z10.3.w1017-765642064.20.7BiHqY&id=26090444229& 超声波模块的链接如下 http://item.taobao.com/item.htm?spm=a1z10.3.w1017-2416603378.21.12DpzH&id=10451084173& 这是我画的板子,可连接GPS和超声波模块 <ignore_js_op> 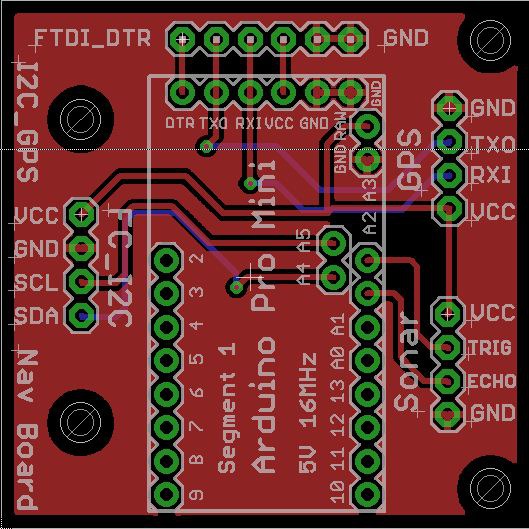 打回来是这样的 <ignore_js_op> 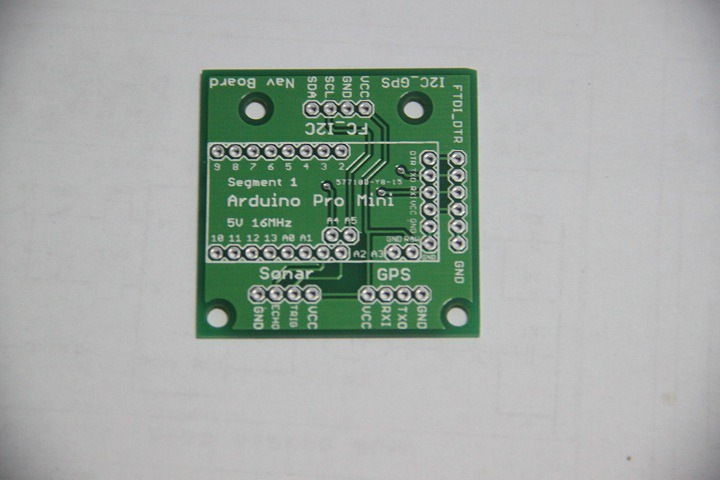 焊好之后 <ignore_js_op> 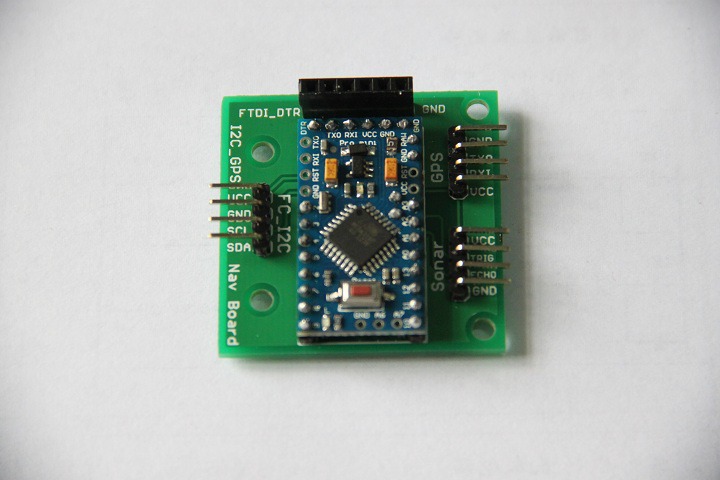 给板子烧程序中 <ignore_js_op> 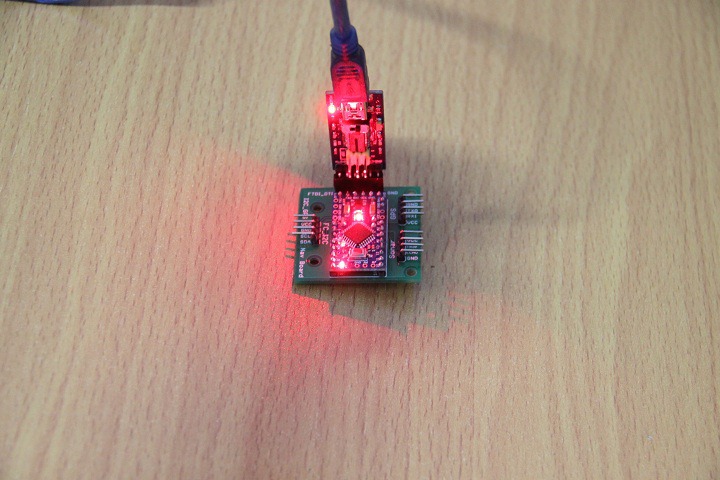 导航板和GPS组装在一起 <ignore_js_op>  导航板、GPS、超声波模块 <ignore_js_op> 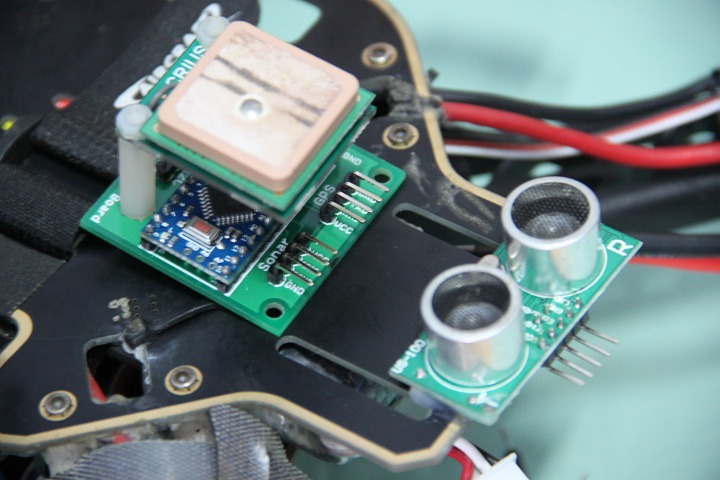 经过耐心调试,GPS定点效果和超声波低空定高效果都很赞,推荐给大家。 未完待续中。。。个人QQ:1471670475 八、PID调试教程 九、四轴特技教程 |
超酷MWC四轴飞行器DIY全套教程,布布扣,bubuko.com
标签:style blog code java tar width
原文地址:http://www.cnblogs.com/dingwei/p/3705094.html