标签:
前言
尽管每辆汽车都有后视镜,但不可避免地都存在一个后视镜的盲区,倒车雷达则可一定程度帮助驾驶员扫除视野死角和视线模糊的缺陷,提高驾驶安全性。上一节已经分析清倒车雷达的语音模块(上一节),本节将深入分析测距模块的设计。
一、倒车雷达的发展
第0代倒车雷达:“倒车请注意”!只要司机挂上倒档,它就会响起。(然并卵)
第1代倒车雷达:在距车1.5~1.8m处有障碍物,蜂鸣器就会工作,距离越近蜂鸣器越急促。(没有显示,考验司机耳力)
第2代倒车雷达:数码管显示距离数字,3色波段绿、黄、红分别表示安全、警告、危险。(可视化,但不美观)
第3代倒车雷达:采用液晶屏绘制一个汽车,实时动态显示周围障碍物距离,抗干扰不强。(美观,性能下降)
第4代倒车雷达:综合前面几代的杂交体,性能和美观都有提高,价格稍高。(综合体)
第5代倒车雷达:整合影音系统,土豪专用,后有摄像头。(高端机型)

ps:左为第2代产品,右为第5代产品
二、雷达测距原理
即使是上面的第5代土豪套餐也是基于超声波测距的,和某些采用多探头或摄像头进行三维重建进行刹车安全制动方案想比,只是小巫见大巫。这里只介绍基于40kHz的超声波测距方案。
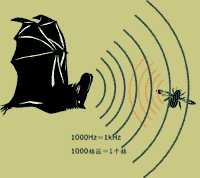
>_<: (为何一般都选取40kHz?)不要拿蝙蝠导航来忽悠我(我小时候就知道了)!那时候我们知道蝙蝠采用超声波能在黑暗的山洞里自由飞翔,这里的超声波是频率超过20kHz的声波。超声波的波长很短因此具有一些类似光线的物理性质:①超声波类似光线,遵循几何光学的规律,具有反射、折射现象,也能聚焦,因此可以利用这些性质进行测量、定位、探伤等处理,在传播中与声速相同;②超声波波长很短,与发射器、接收器的尺寸相当,由发射器发射出来的超声波不向四面八方发散,而成为方向性很强的波束,波长俞短方向性越强,因此超声用于探伤、水下探测,有很高的分辨能力,能分辨出非常微小的缺陷或物体;③能够产生窄脉冲,为了提高探测精度和分辨率。要求探测信号的脉冲极窄,但是一般脉冲宽度时波长的几倍,超声波波长短,因此可以作为窄脉冲信号发生器;④功率大,超声波能够产生并传递强大的能量。声波作用于物体时,物体的分子也要随着运动,其振频率和作用的声波频率一样,频率越高,分子运动速度越快,物体获得的能量正比于分子运动速度的平方。超声频率高,固可给出大频率。正是由于声波在空气中传播,随频率上升衰减加大&&20K以下不是超声波&&频率越高方向性越强,所以取个折中40kHz。
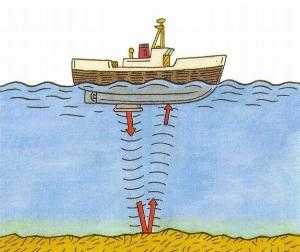
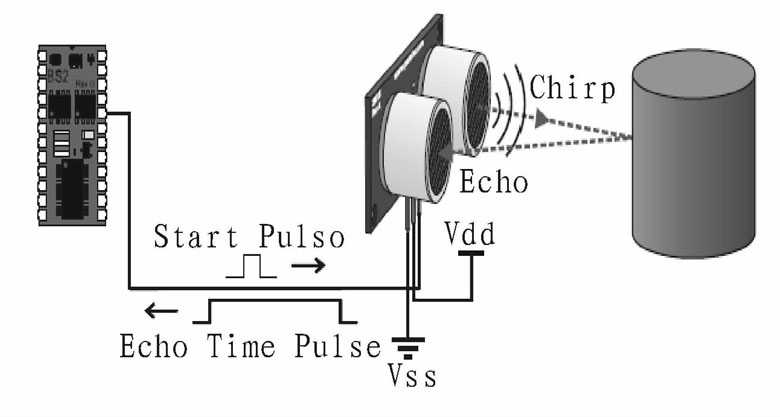
>_<: (超声波测距原理)声波在其介质中被定义为纵波。当声波收到尺寸大于其波长的目标物体阻挡会发生反射,反射波成为回声。假设声波在介质中传播的速度是已知的,而且声波从声源到达目标而后返回声源的时间可以测量得到,那就可以计算从声波到目标的距离,这便是超声波测距的原理。
ps:还记得初中做过的那个傻瓜级的问题嘛
ps:而现在高大上的东西也不过如此
>_<: (一体探头和非一体探头)优点是:单探头计算距离公式比较简单,而双探头要一些修正;探头多了,经济成本和故障概率变大;单探头一般是防水的。缺点是:灵敏度很差,当测量距离很远时,为了增大发射功率,需采用特殊形式的大功率发射换能器,但这样的换能器接收灵敏度一般很低;需要收发隔离控制,否则会烧毁电路;盲区较多。

三、测距电路方案对比
采用回波的原理进行距离的测量的电路方案相差不大,本质都是由40kHz方波生成电路、矩形波放大电路、回波检测电路,主要区别在于各个厂家采用不同方法进行实现(当然,如上一篇中所说还有温度检测模块)。
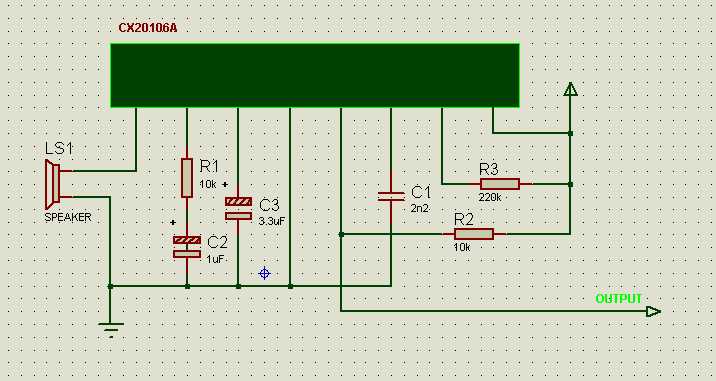
>_<: (方案一:行家说这是打擦边球,不过亲测效果不错)该方案一般采用普通单片机如51系列产生40kHz方波,采用反相器进行矩形波放大,回波检测采用CX20106A芯片。之所以说是擦边球是因为:超声波接收电路主要由CX20106A和超声波换能器构成,CX20106A是一款红外的专用芯片,考虑到红外遥控常用的载波频率38KHz与测距的超声波频率40KHz较为接近,故利用它制作超声波检测接收电路。而行家们一般自己设计标准的40kHz的检测电路(想比这个擦边球,自己设计就麻烦许多啦)!
在我的自制超声波平面定位仪的章节里(第一篇、第二篇、第三篇、第四篇)已经详细介绍:
(发送部分)这里采用51单片机产生40kHz的方波,通过CD4011BE进行反向,如果仅仅如此大家会发现测距的量程很短,于是采用MAX232对信号进行放大(这样效果就非常好了!!!)
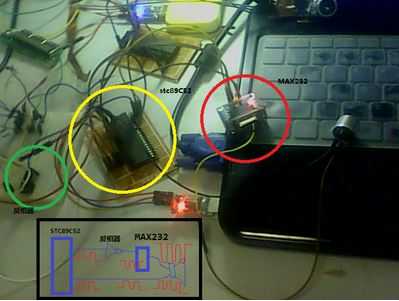

(接收部分)这里采用CX20106A芯片,也就是不正规的方案,不过效果不错~

>_<: (方案二:采用专用芯片GM3101)
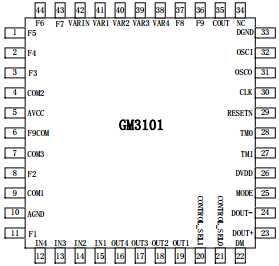
(概述)GM3101是专用于倒车雷达的超声波测距芯片,该芯片提供4路超声波探头的驱动,并根据超声波特性和倒车雷达的使用环境进行了一系列智能化处理,在保证超声波测距精确性基础上,更加强了报警功能的准确性和实用性。测试结果编码后采用双线差分方式输出,提高了信号传输的抗干扰性。GM3101可为倒车雷达系统提供最简单的单芯片控制方案,替代现有的单片机控制方案。 该芯片的优势在于尽可能地为倒车雷达系统提高集成度,减少外围元件。同时该芯片的功能满足高端和通用性的要求,用户利用该组芯片既可以生产高性能的整机产品,还可以灵活设置其产品的报警方式。 全硬件方式实现系统功能, 既降低了用户的开发难度, 更对系统性能有了显著的提高。[QFP44 封装]
(芯片特性)① 电源电压:5V,工作环境温度:-40℃ ~+85℃;② 四路超声波探头接口,探头发送驱动信号5V@2mA;③ 报警信号编码输出,报警信号包括:各探头检测到的障碍物距离危险等级信号、最近障碍物方位信号、最近障碍物距离信号及附加消息,信号电平5V;④ 检测结果输出周期80ms;⑤ 具有防声波衍射误报处理,提高报警信号的准确性;⑥ 具有环境适应功能,提高报警功能的实用性;⑦ 具有智能识别功能,可以忽略小物体,防止误报警;⑧ 报警信号输出采用双线差分方式,提高抗干扰性;⑨ 带防扒车报警功能
(结构性能)GM3101提供4路超声波探头接口,芯片通过探头发送和接收超声波信号,根据发送和接收的时间差计算障碍物的距离,输出相应报警信号。报警信号编码后采用双线差分方式输出,输出信号的内容包括:各探头检测到的障碍物距离的危险等级、最近障碍物的方位、最近障碍物的距离值和附加消息。最大输出距离为 3.15 米,输出精度为 0.05 米。
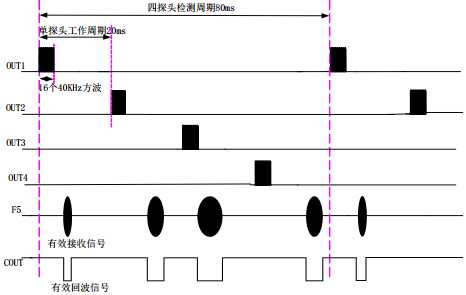
(工作周期)芯片接通电源后,探头驱动引脚向超声波探头发送驱动信号,驱动超声波探头发送超声波信号,驱动信号发送完毕后芯片等待信号返回;探头接收到超声波信号后,将信号送入芯片,进行信号放大处理,记录信号发送和接收的时间差,根据此时间差计算障碍物距离,控制报警信号输出。超声波探头驱动采用分时顺序的驱动方式,即依次对 4 个探头轮流进行驱动,一个探头的工作周期内要包括发送和接收两种操作。4 个探头检测完成构成一个检测周期。若前一探头在本工作周期内没有接收到返回的超声波信号,则芯片也转入控制下一个探头的工作。
(工作模式选择)本芯片具有倒车模式和扒车模式,可以通过MODE引脚设置:低电平或悬空为倒车模式;高电平为扒车模式
(倒车模式数据格式)报警信号以数据包形式输出,每个数据包3个字节:



(扒车模式数据格式)在防扒车功能状态下,芯片只检测 0.6 米距离内有无物体。防扒车模式下数据输出周期也是 80ms。

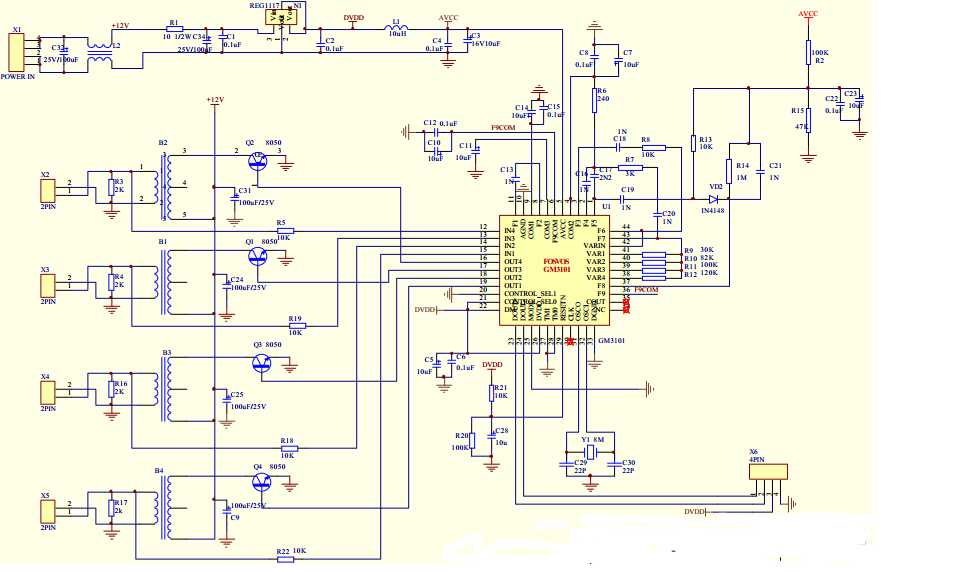
(典型应用)下面是一个完整的方案,包括将车载12V电压转换为雷达工作电压的电路[左上],四个超声波探头电路[左中],GM3101及其附属电路[中间]
四、小结
洋洋洒洒,又到半夜!今天下午刚考完现代控制工程(这样忙碌的期末就算搞定啦)-> 给寝室来个清理门户 -> 和小伙伴谈办公房子的选定的事 -> 和挺喜欢的妹子聊人生——
她:“你觉得我要多长时间能达到年薪100W?”
我:“灰常累,至少6~10年”
她:“感觉好久哦!”
我:“是这样的~”
她:“虽然其实光看时间还好”
她:“可是我感觉我等不起”
她:“我年纪大了,家里人肯定要我结婚生小孩...”
我:“谁都等不起,但要一步一步来”
她:“然后一切都白费了...”
即使是YY也会聊着聊着碰触我们心底偷偷藏起的担忧,有时候阻碍我们的其实是很多不可抗因素带来的心有余而力不足的无奈。年轻人要受制于各种无形的经济压力而无法自由快乐的生活,等不了的不是十几年,而是一去不见的青春。我周身,即使是有为的青年皆若此!本文本来是谈技术的,只是突然伤怀感慨一下而已!
哈哈,楼主其实是超级看得开的!俺写的东西能给人帮助俺就很开心、俺设计的产品让用户称赞俺就满意、俺能团结一批优秀的人干一点热血沸腾的事就没有虚度青春~(最后说一下哦:不要过于对上面YY对话进行咬文嚼字,梦想是要有的,万一逆袭了呢?哈哈 !)
!)
链接
[1] AT89S51 单片机在汽车倒车雷达设计中的应用(张涵)(张涛)CX20106A型:http://pan.baidu.com/s/1mgy28BY
[2] 汽车倒车雷达系统的设计(汪晓红)GM3101型:http://pan.baidu.com/s/1c0EXXRE
[3] 汽车倒车雷达系统全接触(刘海峰)型号介绍:http://pan.baidu.com/s/1jGAHXsi
[4] GM3101数据手册:http://pan.baidu.com/s/1jG9wcYE
其他资料(私用):http://pan.baidu.com/s/1nt9pReT

[硬件项目] 2、汽车倒车雷达设计——基于专用倒车雷达芯片GM3101的设计方案与采用CX20106A红外线检测芯片方案对比
标签:
原文地址:http://www.cnblogs.com/zjutlitao/p/4614440.html