标签:
muduo是由陈硕(http://www.cnblogs.com/Solstice)开发的一个Linux多线程网络库,采用了很多新的Linux特性(例如eventfd、timerfd)和GCC内置函数。其主要特点为:
调用了如下GCC提供的原子操作内建函数:
线程安全的队列,内部实现为std::deque<T>
与BlockingQueue类似,但是内部容器基于boost::circular_buffer<T>
pthread_cond的封装
CountDownLatch,类似发令枪,对condition的再包装,可以保证所有线程同时启动。
backtrace_symbols和backtrace的包装类
MutexLock:pthread_mutex_*的包装类
void*?Thread::startThread(void*?obj) { ??Thread*?thread?=?static_cast<Thread*>(obj); ??thread->runInThread();//对func_的包装,调用了func_ ??return?NULL; } ? ? void?Thread::runInThread() { ??tid_?=?CurrentThread::tid(); ??muduo::CurrentThread::t_threadName?=?name_.c_str(); ??try ??{ ????func_(); ????muduo::CurrentThread::t_threadName?=?"finished"; ??} ?… } ? ? typedef?boost::function<void?()>?ThreadFunc; Thread::Thread(const?ThreadFunc&?func,?const?string&?n):?started_(false),??pthreadId_(0),?tid_(0), ????//func_是实际上要在线程里执行的函数,以boost::function生成了一个函数对象??(functor) ????func_(func),?name_(n) { ??numCreated_.increment(); } |
依旧用pthread_get/setspecific(OP:为何不用__thread关键字?)。
线程单例模式,单例模板类的instance成员采用__thread关键字修饰,具有TLS属性。
void?ThreadPool::run(const?Task&?task) { ??//如果没有线程,直接执行task定义的函数 ??if?(threads_.empty()) ??{ ????task(); ??} ??else ??{ ????MutexLockGuard?lock(mutex_); ????//加入任务队列 ????queue_.push_back(task); ????cond_.notify(); ??} } ? ? ThreadPool::Task?ThreadPool::take() { ??MutexLockGuard?lock(mutex_); ??//?always?use?a?while-loop,?due?to?spurious?wakeup ??while?(queue_.empty()?&&?running_) ??{ ????//如果没有任务,则等待 ????cond_.wait(); ??} ??Task?task; ??if(!queue_.empty()) ??{ ????task?=?queue_.front(); ????queue_.pop_front(); ??} ??return?task; } ? ? //此函数就是线程函数 void?ThreadPool::runInThread() { ??try ??{ ????while?(running_) ????{ ??????????????//每个线程都从这里获取任务 ??????Task?task(take()); ??????if?(task) ??????{ ??????????????????//执行任务 ????????task(); ??????} ????} ??} ??… } |
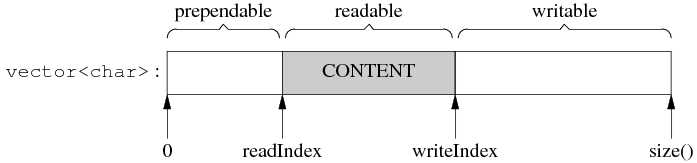
如果writable < datalen,但是prependable+writeable >= datalen,则将readIndex挪至最前,将prependable+writeable合并得到一个足够大的缓冲区(一般来说,这种情况是由于还有尚未读取的数据,readIndex向后移动位置造成的);如果prependable+writeable < datalen,说明全部可写区域之和也不足,则vertor::resize()扩展缓冲区。
void?makeSpace(size_t?len) { ????if?(writableBytes()?+?prependableBytes()?<?len?+?kCheapPrepend) ????{ ??????//?FIXME:?move?readable?data ??????buffer_.resize(writerIndex_+len); ????} ????else ????{ ??????//?move?readable?data?to?the?front,?make?space?inside?buffer ??????assert(kCheapPrepend?<?readerIndex_); ??????size_t?readable?=?readableBytes(); ??????std::copy(begin()+readerIndex_, ????????????????begin()+writerIndex_, ????????????????begin()+kCheapPrepend); ??????readerIndex_?=?kCheapPrepend; ??????writerIndex_?=?readerIndex_?+?readable; ??????assert(readable?==?readableBytes()); ????} } |
class?Channel?:?boost::noncopyable { public: ??typedef?boost::function<void()>?EventCallback; ??typedef?boost::function<void(Timestamp)>?ReadEventCallback; private: ??EventLoop*?loop_;?//属于哪个reactor ??const?int??fd_;?//关联的FD ??int????????events_;?//关注事件 ??int????????revents_;?//ready事件 ??bool?eventHandling_;?//当前正在处理事件 ??ReadEventCallback?readCallback_; ??EventCallback?writeCallback_;?//如何写数据 ??EventCallback?closeCallback_;?//如何关闭链接 ??EventCallback?errorCallback_;?//如何处理错误 }; |
如果loop有事件发生,将触发handleEvent回调:
void?Channel::handleEventWithGuard(Timestamp?receiveTime) { ??eventHandling_?=?true; ??if?((revents_?&?POLLHUP)?&&?!(revents_?&?POLLIN)) ??{ ????if?(logHup_) ????{ ??????LOG_WARN?<<?"Channel::handle_event()?POLLHUP"; ????} ????if?(closeCallback_)?closeCallback_(); ??} ? ? ??if?(revents_?&?POLLNVAL) ??{ ????LOG_WARN?<<?"Channel::handle_event()?POLLNVAL"; ??} ? ? ??if?(revents_?&?(POLLERR?|?POLLNVAL)) ??{ ????if?(errorCallback_)?errorCallback_(); ??} ??if?(revents_?&?(POLLIN?|?POLLPRI?|?POLLRDHUP)) ??{ ????if?(readCallback_)?readCallback_(receiveTime); ??} ??if?(revents_?&?POLLOUT) ??{ ????if?(writeCallback_)?writeCallback_(); ??} ??eventHandling_?=?false; } |
class?EventLoop?:?boost::noncopyable { public: ??void?loop(); ??void?quit(); ? ? ??///?Runs?callback?immediately?in?the?loop?thread. ??///?It?wakes?up?the?loop,?and?run?the?cb. ??///?If?in?the?same?loop?thread,?cb?is?run?within?the?function. ??///?Safe?to?call?from?other?threads. ??void?runInLoop(const?Functor&?cb); ? ? ??///?Queues?callback?in?the?loop?thread. ??///?Runs?after?finish?pooling. ??///?Safe?to?call?from?other?threads. ??void?queueInLoop(const?Functor&?cb); ? ? ??///?Runs?callback?at?‘time‘. ??///?Safe?to?call?from?other?threads. ??TimerId?runAt(const?Timestamp&?time,?const?TimerCallback&?cb); ? ? ??///?Runs?callback?after?@c?delay?seconds. ??///?Safe?to?call?from?other?threads. ??TimerId?runAfter(double?delay,?const?TimerCallback&?cb); ? ? ??///?Runs?callback?every?@c?interval?seconds. ??///?Safe?to?call?from?other?threads. ??TimerId?runEvery(double?interval,?const?TimerCallback&?cb); ? ? ??///?Cancels?the?timer. ??///?Safe?to?call?from?other?threads. ??void?cancel(TimerId?timerId); ? ? ??//?internal?usage ??void?wakeup(); ??void?updateChannel(Channel*?channel); ??void?removeChannel(Channel*?channel); ??bool?isInLoopThread()?const?{?return?threadId_?==?CurrentThread::tid();?} private: ??void?handleRead();??//?waked?up ??void?doPendingFunctors(); ??typedef?std::vector<Channel*>?ChannelList; ? ? ??bool?looping_;?/*?atomic?*/ ??bool?quit_;?/*?atomic?*/ ??bool?eventHandling_;?/*?atomic?*/ ??bool?callingPendingFunctors_;?/*?atomic?*/ ??const?pid_t?threadId_; ??Timestamp?pollReturnTime_; ??boost::scoped_ptr<Poller>?poller_; ??boost::scoped_ptr<TimerQueue>?timerQueue_; ??int?wakeupFd_; ??//?unlike?in?TimerQueue,?which?is?an?internal?class, ??//?we?don‘t?expose?Channel?to?client. ??boost::scoped_ptr<Channel>?wakeupChannel_; ??ChannelList?activeChannels_; ??Channel*?currentActiveChannel_; ??MutexLock?mutex_; ??std::vector<Functor>?pendingFunctors_;?//?@BuardedBy?mutex_ }; ? ? __thread?EventLoop*?t_loopInThisThread?=?0; |
t_loopInThisThread被定义为per thread的全局变量,并在EventLoop的构造函数中初始化:
? ?
epoll默认工作方式是LT。
? ?
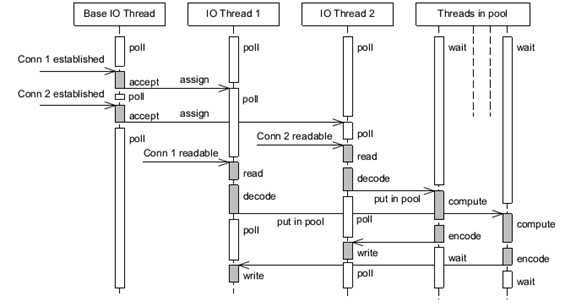
从这个muduo的工作模型来看,可以采用an IO thread per fd的形式处理各connection的读/写/encode/decode等工作,计算线程池中的线程在一个eventfd上监听,激活后就将connection作为参数与decoded packet一起传递到计算线程池中,并在计算完成后将结果直接写入IO thread的fd。并采用round-robin的方式选出下一个计算线程。
不同的解决方案:实际上这些线程是可以归并的,仅仅取决于任务的性质:IO密集型或是计算密集型。限制仅仅在于:出于避免过多thread context切换造成性能下降和资源对thread数量的约束,不能采用a thread per fd的模型,而是将fd分为若干组比较均衡的分配到IO线程中。
? ?
EventLoop的跨线程激活:
EventLoop::EventLoop() ??:?wakeupFd_(createEventfd()), ????wakeupChannel_(new?Channel(this,?wakeupFd_)) { ??wakeupChannel_->setReadCallback( ??????boost::bind(&EventLoop::handleRead,?this));?//?绑定到handleRead上面了 ??//?we?are?always?reading?the?wakeupfd ??wakeupChannel_->enableReading(); } |
跨线程激活的函数是wakeUp:
void?EventLoop::wakeup() { ??uint64_t?one?=?1; ??ssize_t?n?=?sockets::write(wakeupFd_,?&one,?sizeof?one);?//?类似于管道直接写 } |
一旦wakeup完成之后那么wakeUpFd_就是可读的,这样EventLoop就会被通知到并且立刻跳出epoll_wait开始处理。当然我们需要将这个wakeupFd_ 上面数据读出来,不然的话下一次又会被通知到,读取函数就是handleRead:
void?EventLoop::handleRead() { ??uint64_t?one?=?1; ??ssize_t?n?=?sockets::read(wakeupFd_,?&one,?sizeof?one); } |
runInLoop和queueInLoop就是跨线程任务。
void?EventLoop::runInLoop(const?Functor&?cb){ ?????//如果这个函数在自己的线程调用,那么就可以立即执行 ??if?(isInLoopThread()){? ????cb(); ??}else{ ??????????//如果是其他线程调用,那么加入到pendingFunctors里面去 ?????queueInLoop(cb); ??????????//并且通知这个线程,有任务到来 ?????wakeup();? ??} } ? ? void?EventLoop::queueInLoop(const?Functor&?cb){ ??{ ??MutexLockGuard?lock(mutex_); ??pendingFunctors_.push_back(cb); ??} ??/*被排上队之后如果是在自己线程并且正在执行pendingFunctors的话,那么就可以激活 ??否则下一轮完全可以被排上,所以没有必要激活*/ ??if?(isInLoopThread()?&&?callingPendingFunctors_){ ????wakeup();? ??} } |
? ?
调用栈:
addTimer(const TimerCallback& cb,Timestamp when, double interval) => addTimerInLoop(Timer* timer) =>insert(timer)中:
typedef?std::pair<Timestamp,?Timer*>?Entry; typedef?std::set<Entry>?TimerList; bool?earliestChanged?=?false; Timestamp?when?=?timer->expiration(); TimerList::iterator?it?=?timers_.begin(); if?(it?==?timers_.end()?||?when?<?it->first) { ??earliestChanged?=?true; } |
这里的微妙之处在于:如果是第一个定时器,begin()=end(),那么earliestChanged = true;会触发resetTimerfd:
void?TimerQueue::addTimerInLoop(Timer*?timer) { ??loop_->assertInLoopThread(); ??bool?earliestChanged?=?insert(timer); ? ? ??if?(earliestChanged) ??{ ????//调用::timerfd_settime(timerfd,?0,?&newValue,?&oldValue)启动定时器 ????resetTimerfd(timerfd_,?timer->expiration()); ??} } |
当定时器触发后:
void?TimerQueue::handleRead() { ??loop_->assertInLoopThread(); ??Timestamp?now(Timestamp::now()); ??readTimerfd(timerfd_,?now); ??//我们可以知道有哪些计时器超时 ??std::vector<Entry>?expired?=?getExpired(now);? ??//?safe?to?callback?outside?critical?section ??for?(std::vector<Entry>::iterator?it?=?expired.begin(); ??????it?!=?expired.end();?++it) ??{ ?????//对于这些超时的Timer,执行run()函数,对应也就是我们一开始注册的回调函数 ?????it->second->run();? ??} ??reset(expired,?now); } |
TcpConnection完成的工作就是当TCP连接建立之后处理socket的读写以及关闭。同样我们看看TcpConnection的结构
class?TcpConnection?:?boost::noncopyable,?public?boost::enable_shared_from_this<TcpConnection> { ??public: ????///?Constructs?a?TcpConnection?with?a?connected?sockfd ????/// ????///?User?should?not?create?this?object. ????TcpConnection(EventLoop*?loop,?//?建立连接需要一个Reactor ??????????????????const?string&?name,?//?连接名称 ??????????????????int?sockfd,?//?连接fd ??????????????????const?InetAddress&?localAddr,?//?本地IP@ ??????????????????const?InetAddress&?peerAddr);?//对端IP@ ????//?called?when?TcpServer?accepts?a?new?connection ????void?connectEstablished();???//?should?be?called?only?once ????//?called?when?TcpServer?has?removed?me?from?its?map ????void?connectDestroyed();??//?should?be?called?only?once ??private: ????enum?StateE?{?kDisconnected,?kConnecting,?kConnected,?kDisconnecting?}; ????void?sendInLoop(const?void*?message,?size_t?len);?//?发送消息 ????void?setState(StateE?s)?{?state_?=?s;?} ? ? ????EventLoop*?loop_; ????string?name_; ????StateE?state_;??//?FIXME:?use?atomic?variable ????//?we?don‘t?expose?those?classes?to?client. ????boost::scoped_ptr<Socket>?socket_;?//?socket. ????boost::scoped_ptr<Channel>?channel_;?//?连接channel ????InetAddress?localAddr_; ????InetAddress?peerAddr_; ????ConnectionCallback?connectionCallback_;?//?连接回调,这个触发包括在连接建立和断开都会触发 ????MessageCallback?messageCallback_;?//?有数据可读的回调 ????WriteCompleteCallback?writeCompleteCallback_;?//?写完毕的回调 ????CloseCallback?closeCallback_;?//?连接关闭回调 ????Buffer?inputBuffer_;?//?数据读取buffer. ????Buffer?outputBuffer_;?//?FIXME:?use?list<Buffer>?as?output?buffer. ????boost::any?context_;?//?上下文环境 ????//?FIXME:?creationTime_,?lastReceiveTime_ ????//????????bytesReceived_,?bytesSent_ }; |
首先TcpConnection在初始化的时候会建立好channel。然后一旦TcpClient或者是TcpServer建立连接之后的话,那么调用TcpConnection::connectEstablished。这个函数内部的话就会将channel设置成为可读。一旦可读的话那么TcpConnection内部就会调用handleRead这个动作,内部托管了读取数据这个操作。 读取完毕之后然后交给MessageBack这个回调进行操作。如果需要写的话调用sendInLoop,那么会将message放在outputBuffer里面,并且设置可写。当可写的话TcpConnection内部就托管写,然后写完之后的话会发生writeCompleteCallback这个回调。托管的读写操作都是非阻塞的。如果希望断开的话调用 shutdown。解除这个连接的话那么可以调用TcpConnection::connectDestroyed,内部大致操作就是从reactor移除这个channel。
在TcpConnection这层并不知道一次需要读取多少个字节,这个是在上层进行消息拆分的。TcpConnection一次最多读取64K字节的内容,然后交给Upper App。后者决定这些内容是否足够,如果不够的话那么直接返回让Reactor继续等待读。 同样写的话内部也是会分多次写。这样就要求reactor内部必须使用水平触发而不是边缘触发。
这个类主要包装了TcpConnector的功能。
TcpClient::TcpClient(EventLoop*?loop, ?????????????????????const?InetAddress&?serverAddr, ?????????????????????const?string&?name) ????????:?loop_(CHECK_NOTNULL(loop)), ??????????connector_(new?Connector(loop,?serverAddr)), ??????????name_(name), ??????????connectionCallback_(defaultConnectionCallback), ??????????messageCallback_(defaultMessageCallback), ??????????retry_(false), ??????????connect_(true), ??????????nextConnId_(1) { ????connector_->setNewConnectionCallback( ????????boost::bind(&TcpClient::newConnection,?this,?_1)); ????//?FIXME?setConnectFailedCallback } |
TcpServer::TcpServer(EventLoop*?loop, ?????????????????????const?InetAddress&?listenAddr, ?????????????????????const?string&?nameArg) ??:?loop_(CHECK_NOTNULL(loop)), ????hostport_(listenAddr.toHostPort()), ????name_(nameArg), ????acceptor_(new?Acceptor(loop,?listenAddr)), ????threadPool_(new?EventLoopThreadPool(loop)), ????connectionCallback_(defaultConnectionCallback), ????messageCallback_(defaultMessageCallback), ????started_(false), ????nextConnId_(1) { ??acceptor_->setNewConnectionCallback( ??????boost::bind(&TcpServer::newConnection,?this,?_1,?_2)); } |
同样是建立好acceptor这个对象然后设置好回调为TcpServer::newConnection,同时在外部设置好TcpConnection的各个回调。然后调用start来启动服务器,start 会调用acceptor::listen这个方法,一旦有连接建立的话那么会调用newConnection。下面是newConnection代码:
void?TcpServer::newConnection(int?sockfd,?const?InetAddress&?peerAddr) { ????loop_->assertInLoopThread(); ????EventLoop*?ioLoop?=?threadPool_->getNextLoop(); ????char?buf[32]; ????snprintf(buf,?sizeof?buf,?":%s#%d",?hostport_.c_str(),?nextConnId_); ????++nextConnId_; ????string?connName?=?name_?+?buf; ????//?FIXME?poll?with?zero?timeout?to?double?confirm?the?new?connection ????TcpConnectionPtr?conn( ????????new?TcpConnection(ioLoop,?connName,?sockfd,?localAddr,?peerAddr)); ????connections_[connName]?=?conn; ????conn->setConnectionCallback(connectionCallback_); ????conn->setMessageCallback(messageCallback_); ????conn->setWriteCompleteCallback(writeCompleteCallback_); ????conn->setCloseCallback( ????????boost::bind(&TcpServer::removeConnection,?this,?_1));?//?FIXME:?unsafe ????ioLoop->runInLoop(boost::bind(&TcpConnection::connectEstablished,?conn)); } |
对于服务端来说连接都被唯一化了然后映射为字符串放在connections_这个容器内部。threadPool_->getNextLoop()可以轮询地将取出每一个线程然后将 TcpConnection::connectEstablished轮询地丢到每个线程里面去完成。存放在connections_是有原因了,每个TcpConnection有唯一一个名字,这样Server 就可以根据TcpConnection来从自己内部移除链接了。在析构函数里面可以遍历connections_内容得到所有建立的连接并且逐一释放。
标签:
原文地址:http://www.cnblogs.com/CodeComposer/p/4719783.html