标签:
我们上一篇已经详细的分析了利用雅克比矩阵可以由给出的关节速度求解末端执行器的速度,除此之外,雅克比矩阵还可以体现末端执行器上施加的力和关节上施加的力矩之间的关系。今天主要介绍的就是这种关系。
在这之前,先说两点后面要用到的知识:
(1)虚功原理:对于一个物体,只需要考虑主动力,不用管所有的内力,因为内力是由结构产生的,这种力并不能使物体产生移动。而对于一个静态平衡的系统,所有外力的作用,经过虚位移,所作的虚 功,总和等于零。
(2)叉乘矩阵:如图1所示,叉乘前面的向量可以转化成一个矩阵,我们称这个矩阵为叉乘矩阵,可以看出这是一个反对称矩阵。其最重要的性质就是A=-AT。
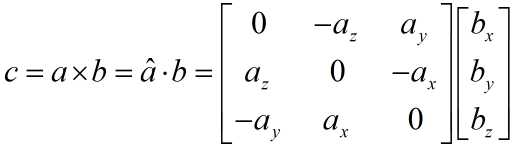
图1
接下来进入正题。如图2所示,我们可以类似线速度和角速度的关系,用叉乘的方式表示出力和力矩之间的关系。
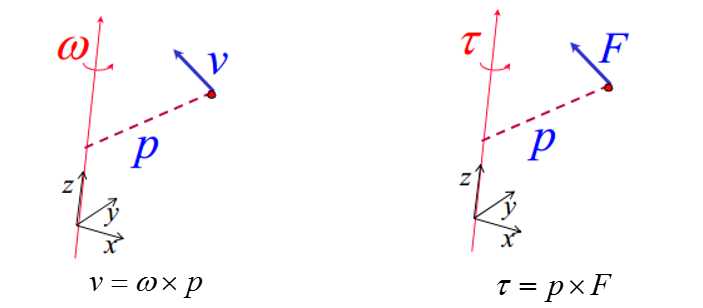
图2
根据图2的公式以及叉乘矩阵的性质,我们可以做进一步推导,就可以得到两个机器人最基础的公式,具体如下:
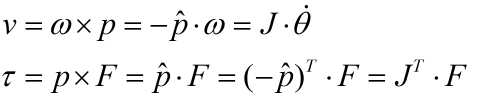
图3
我们现在提供另一种推导方法,根据虚功原理,我们对末端执行器进行虚位移,由于虚功总和为0,我们可以进行如下推导:
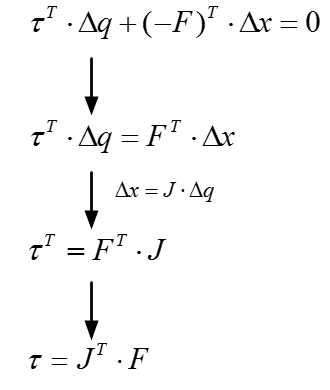
图4
这样我们就可以通过雅克比矩阵的转置把力和力矩联系在一起。
雅克比矩阵转置(Jacobian Transpose)在力和力矩中的应用
标签:
原文地址:http://www.cnblogs.com/caster99/p/4733988.html